迭代学习控制-D型学习律-Simulink仿真
- D型学习律
- 收敛性
- Simulink仿真
D型学习律
D型学习律的输出仅仅利用误差的倒数:

其中k为迭代次数,Tao为定常增益矩阵,u为控制量
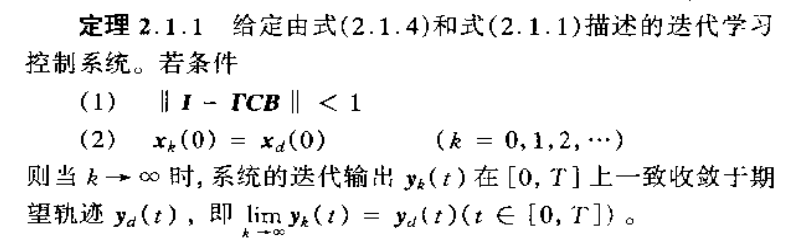
收敛性
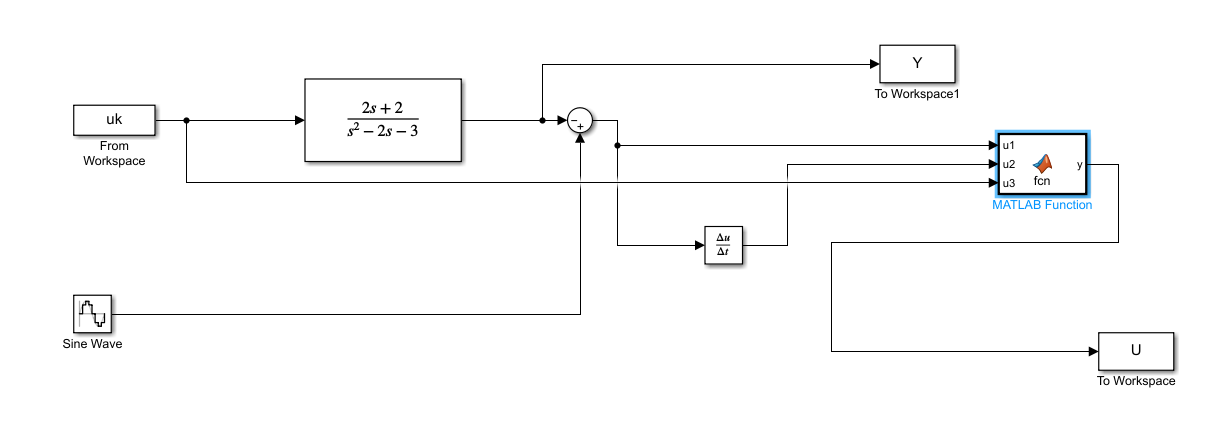
Simulink仿真
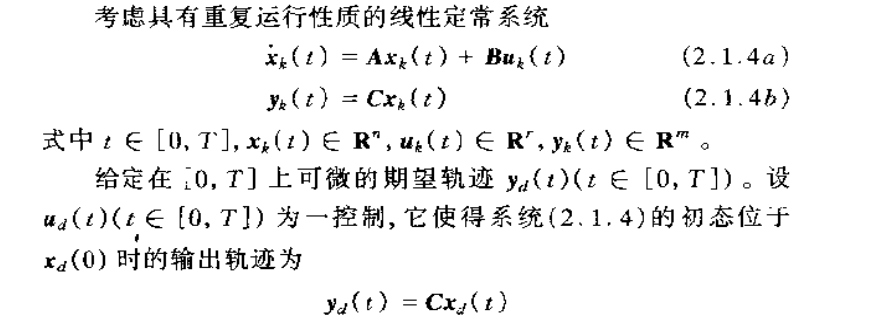
考虑这样一个线性系统:
A=[1 2;2 1] B=[1 ;1] C=[1 1]
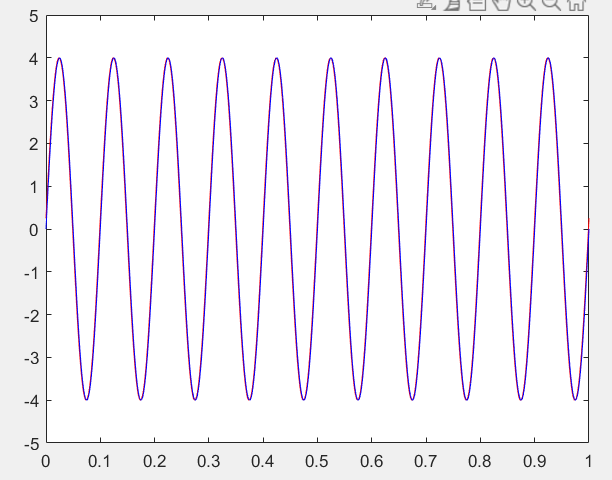
根据定理2.1.1,要使得输出收敛于期望轨迹,Tao<1/2 这里取Tao=1/3
yd为正弦波,迭代10次结果如下:
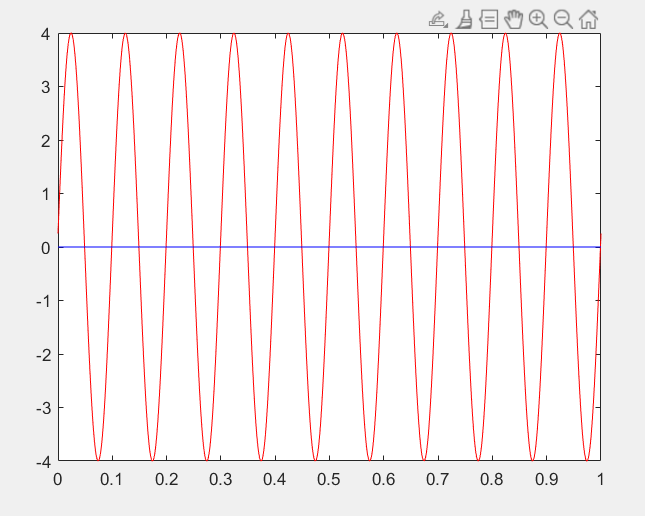
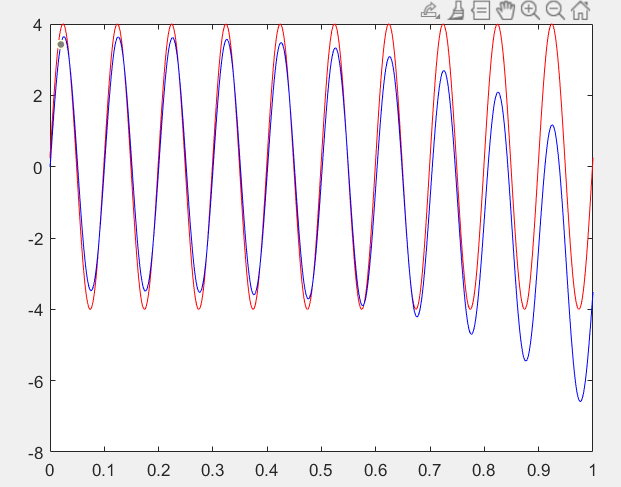
如果把Tao取得大于1/2则输出发散
最后
以上就是着急小霸王最近收集整理的关于迭代学习控制和仿真(ILC)D型学习律的全部内容,更多相关迭代学习控制和仿真(ILC)D型学习律内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复