目录
一.目的... 3
二.内容... 3
三.实验过程与结果... 3
1.学号推算出控制对象的模型参数... 3
2.齐格勒—尼柯尔斯的临界比例度法... 3
3.后向矩形法设计数字式PID.. 5
4.双线性变换法设计数字式PID控制器... 5
5.输入信号进行饱和限幅... 7
6.阶跃给定r改较大的值... 8
7.反馈抑制积分法... 8
8.遇限削弱积分法... 10
四、实验分析与结论... 11
1.PID参数整定的方法(根据经验):... 11
2、性能分析... 12
3、存在不足... 12
4、总结... 12
前言:尽管不太想传这一期内容,但是这门课的老师卡我绩点,真的难受,害怪我太菜了,怪我,怨我。愿后来者能轻松点。能站着就不要躺,要站也要站在巨人的肩膀上。
一.目的
1.加深理解和掌握计算机控制系统的组成结构和原理。
2.学习并掌握数字PID控制算法的原理和参数整定方法。
3.学习掌握积分饱和现象的产生原因及改进措施。
4.学习并掌握数字控制器的混合仿真实验研究方法。
二.内容
设被控对象的传递函数为
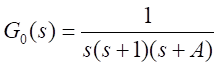
,其中参数A的值根据学生学号的最后三位数字xyz来确定:A=3*x+10*y+z,要求设计一个数字式PID控制器来实现闭环控制:
试采用齐格勒—尼柯尔斯整定法则(临界比例度法)确定PID参数值。观察PID参数变化对系统动态性能的影响,以及不同的离散化方式下控制信号的特点变化。
观察系统在大的参考给定下出现的积分饱和现象,采用适当的改进措施,并对改进前后的性能加以比较。
三.实验过程与结果
1.学号推算出控制对象的模型参数
学号后3位 601 。
因此 A=3*6+0*10+1=19 传递函数使用零极点模式。
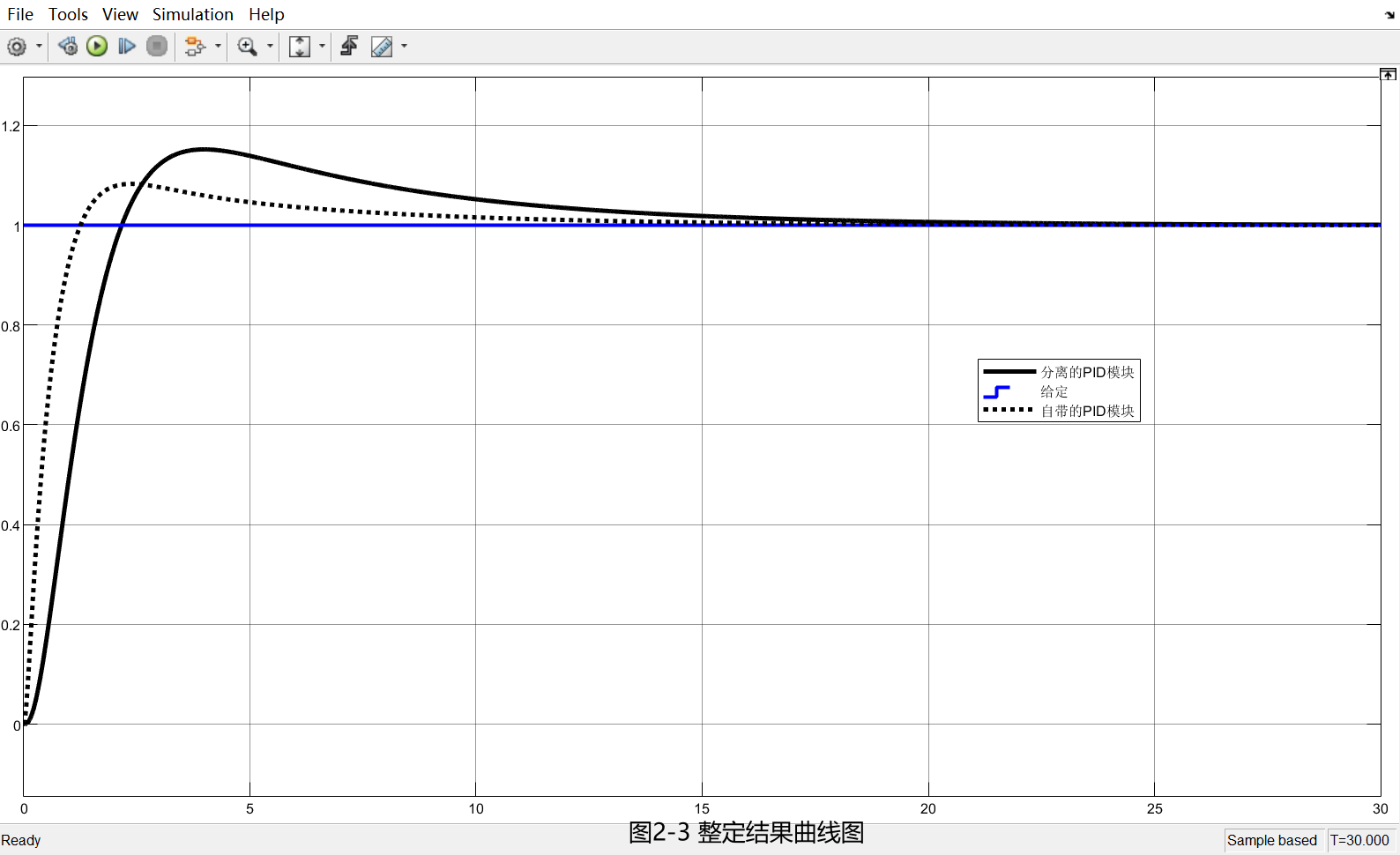
2.齐格勒—尼柯尔斯的临界比例度法
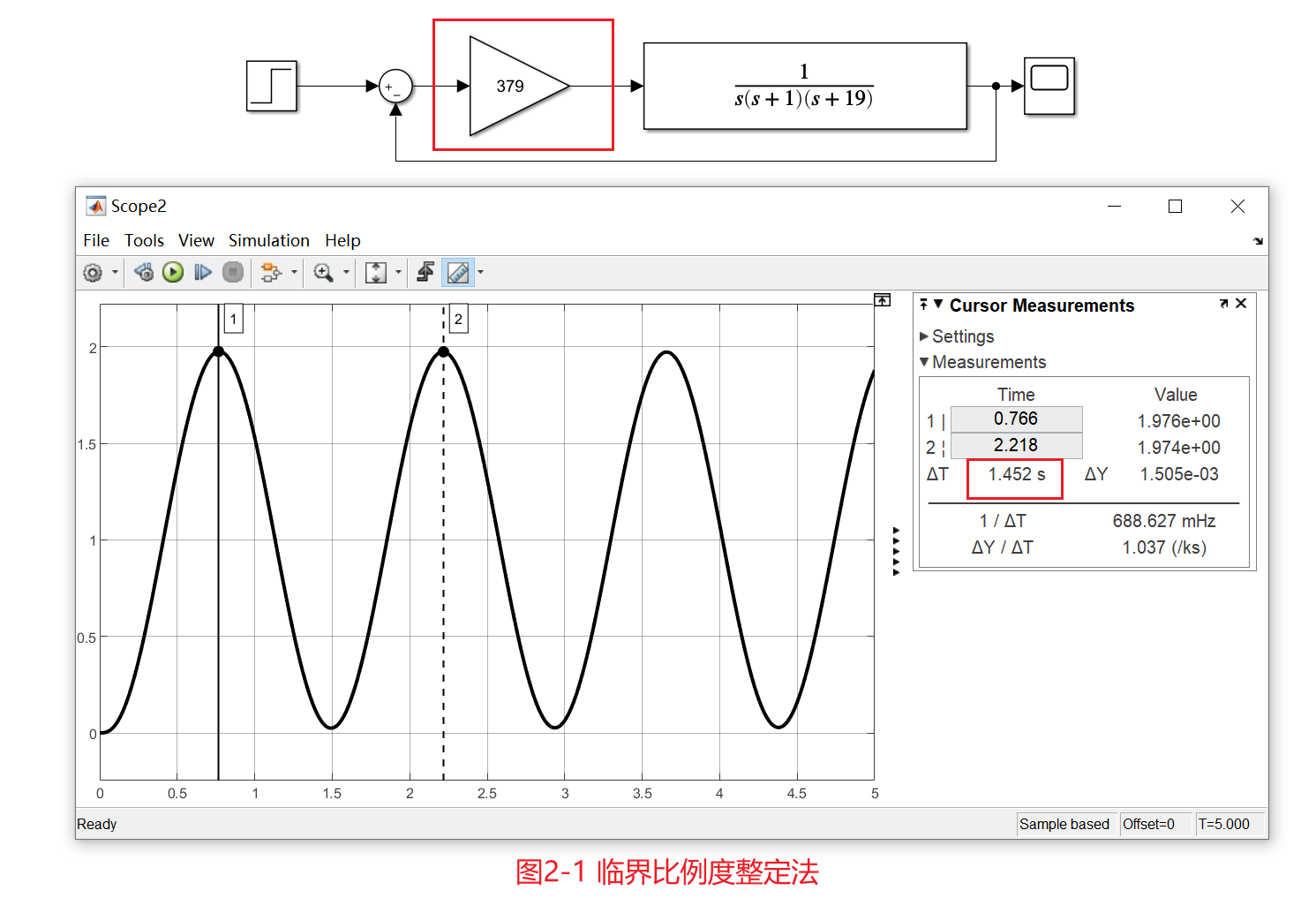
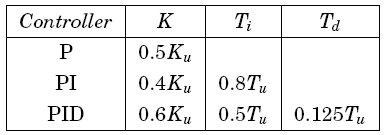
初始整定值:Kp=Ku=0.6*379=227.4 Ki=0.5*1.442*Kp=165.094 Kd=41.27
经过一番折腾的整定值与此大不相同。
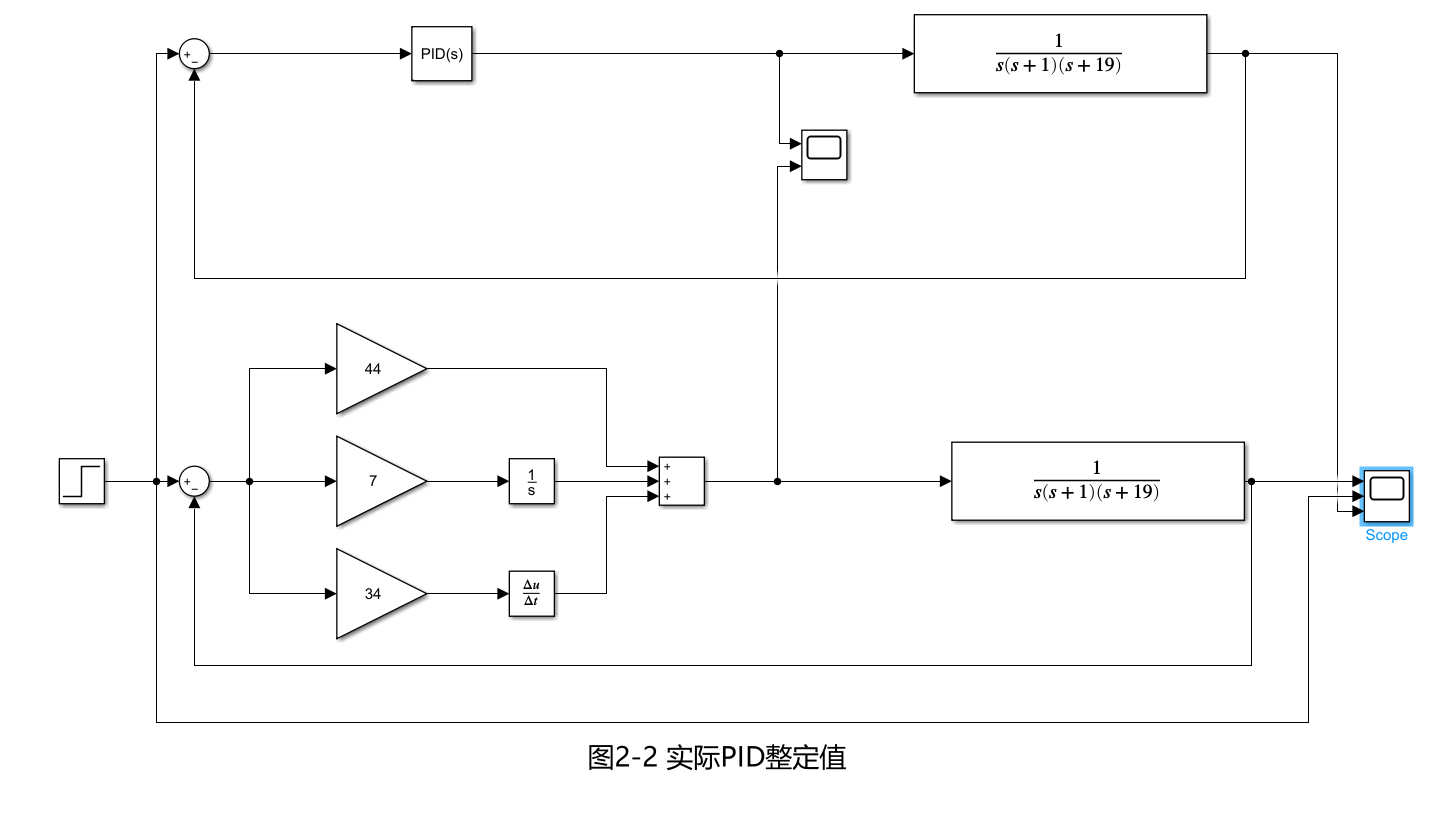
这里采用平行结构的分离PID模块与simulink自带的PID模块进行仿真,发现simulink自带的模块带了个滤波器(无法关闭,因为理想微分不存在,所以多了个参数N),所以之后的实验该模块都只作为参考设计。
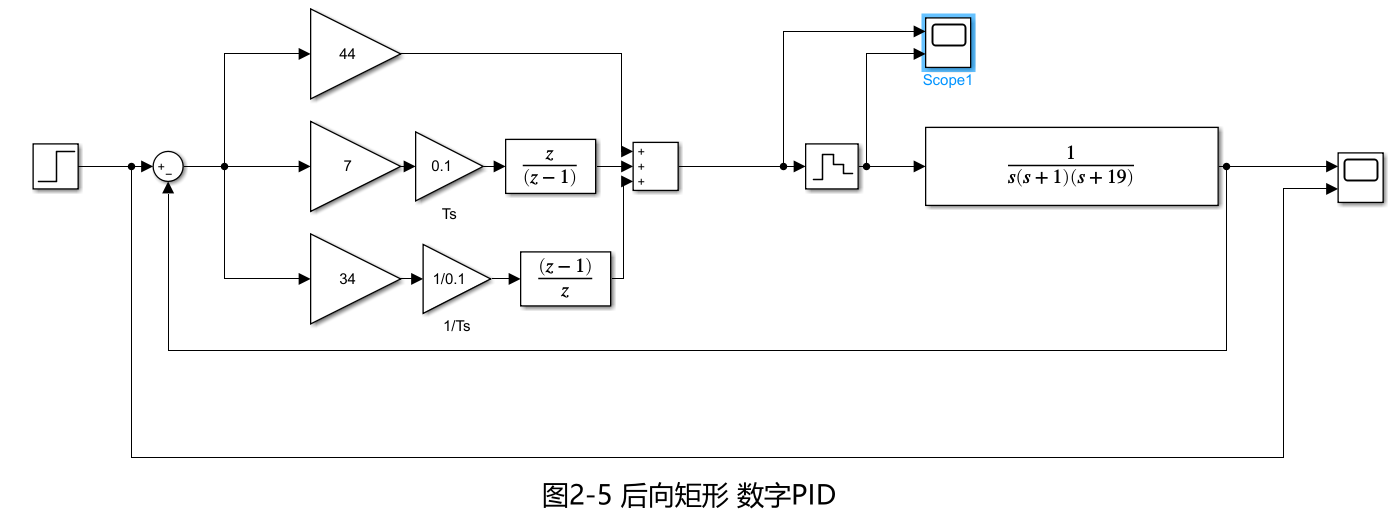
3.后向矩形法设计数字式PID
很显然可以通过,自带的离散PID模块,轻松的设计出来所需要的控制器,这里发现仿真结果与分离式的PID相同(因为滤波器可以关闭),但是这里只是作为参考设计。
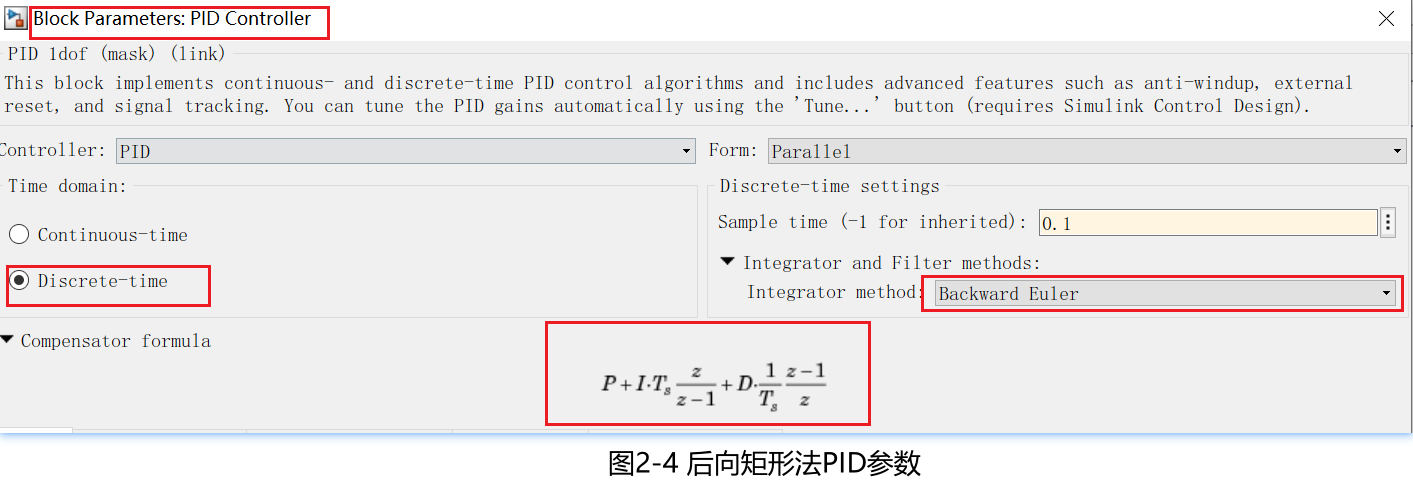
离散时间取:Ts=0.1。(1/10的上升时间)
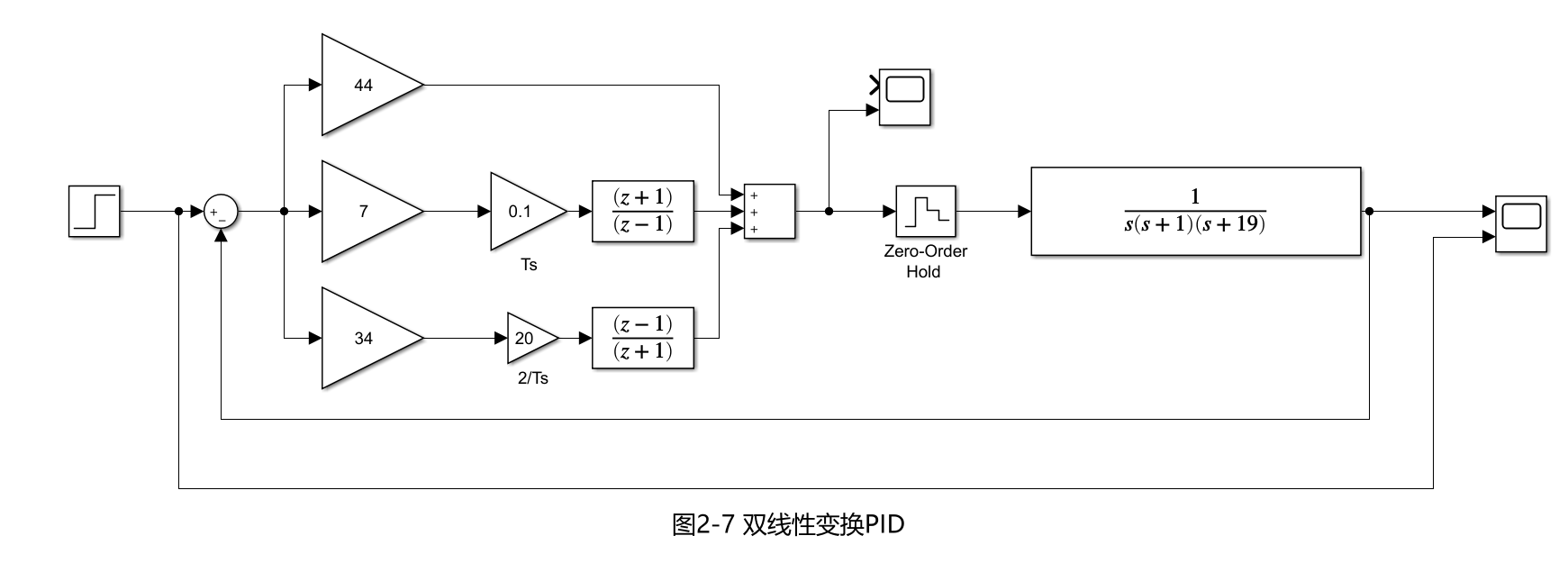
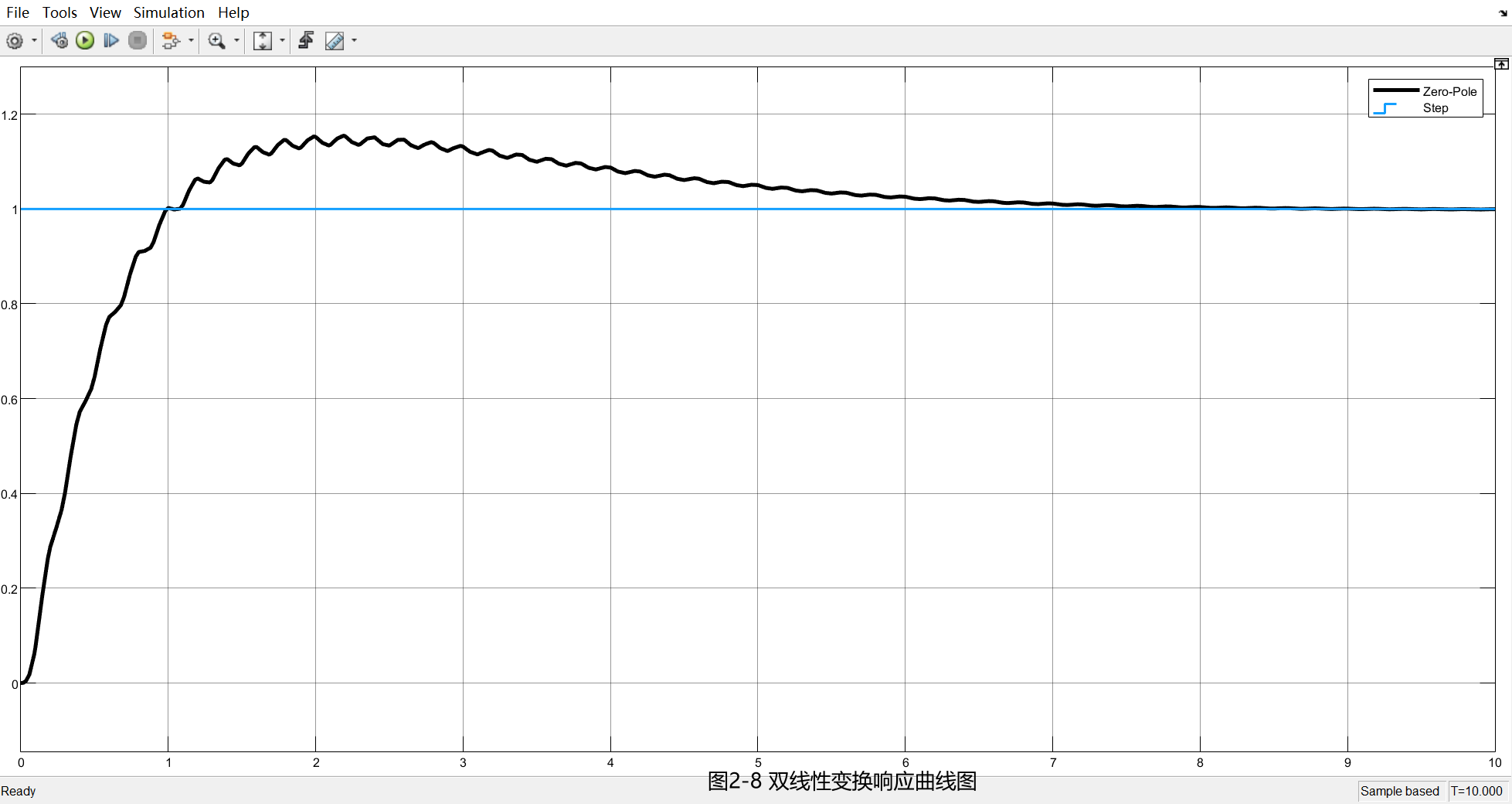
4.双线性变换法设计数字式PID控制器
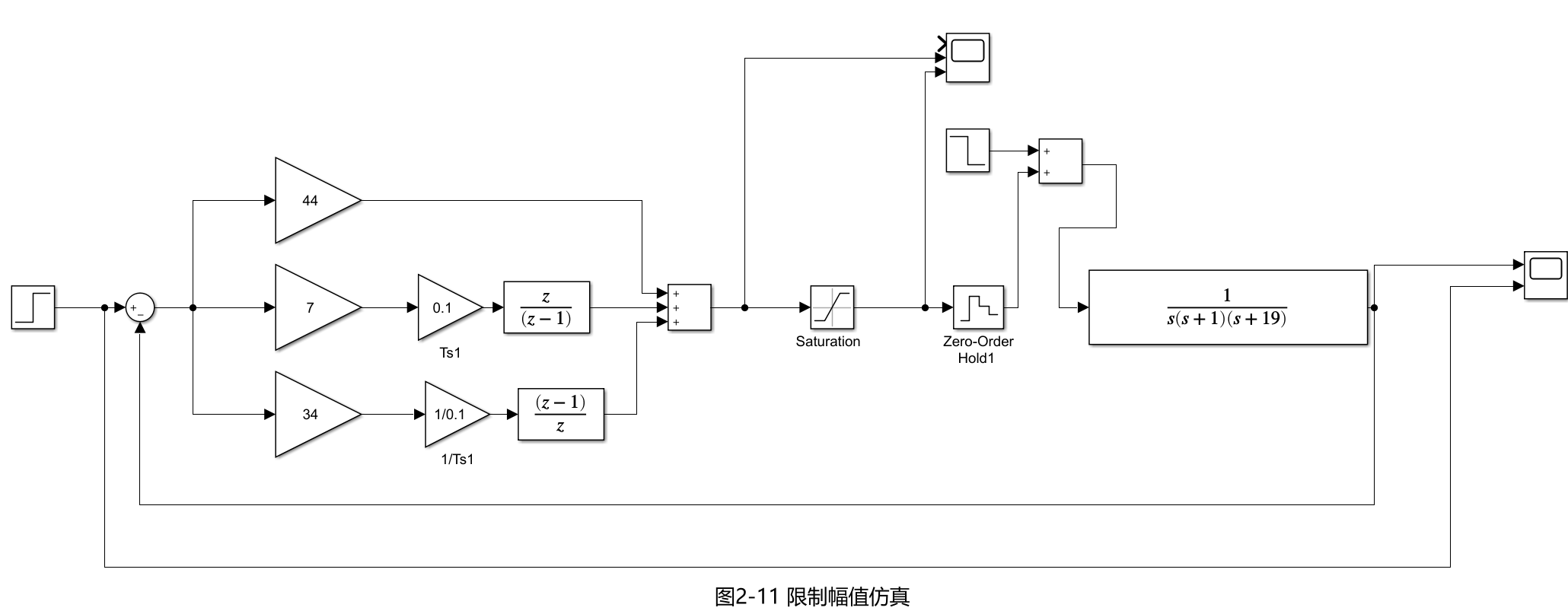
5.输入信号进行饱和限幅
取Umax/2=190。
扰动量 -Umax/2/5=-38。
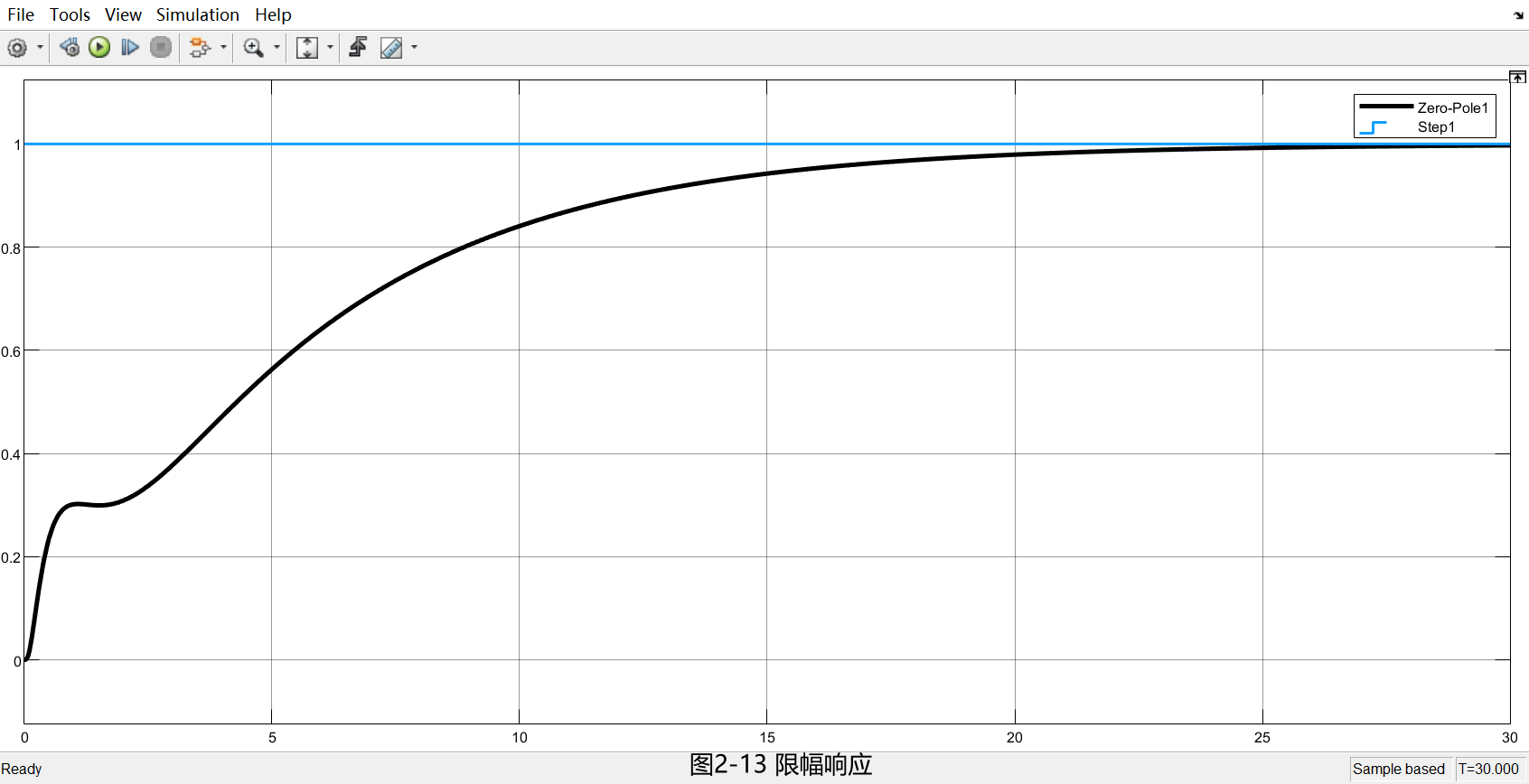
6.阶跃给定r改较大的值
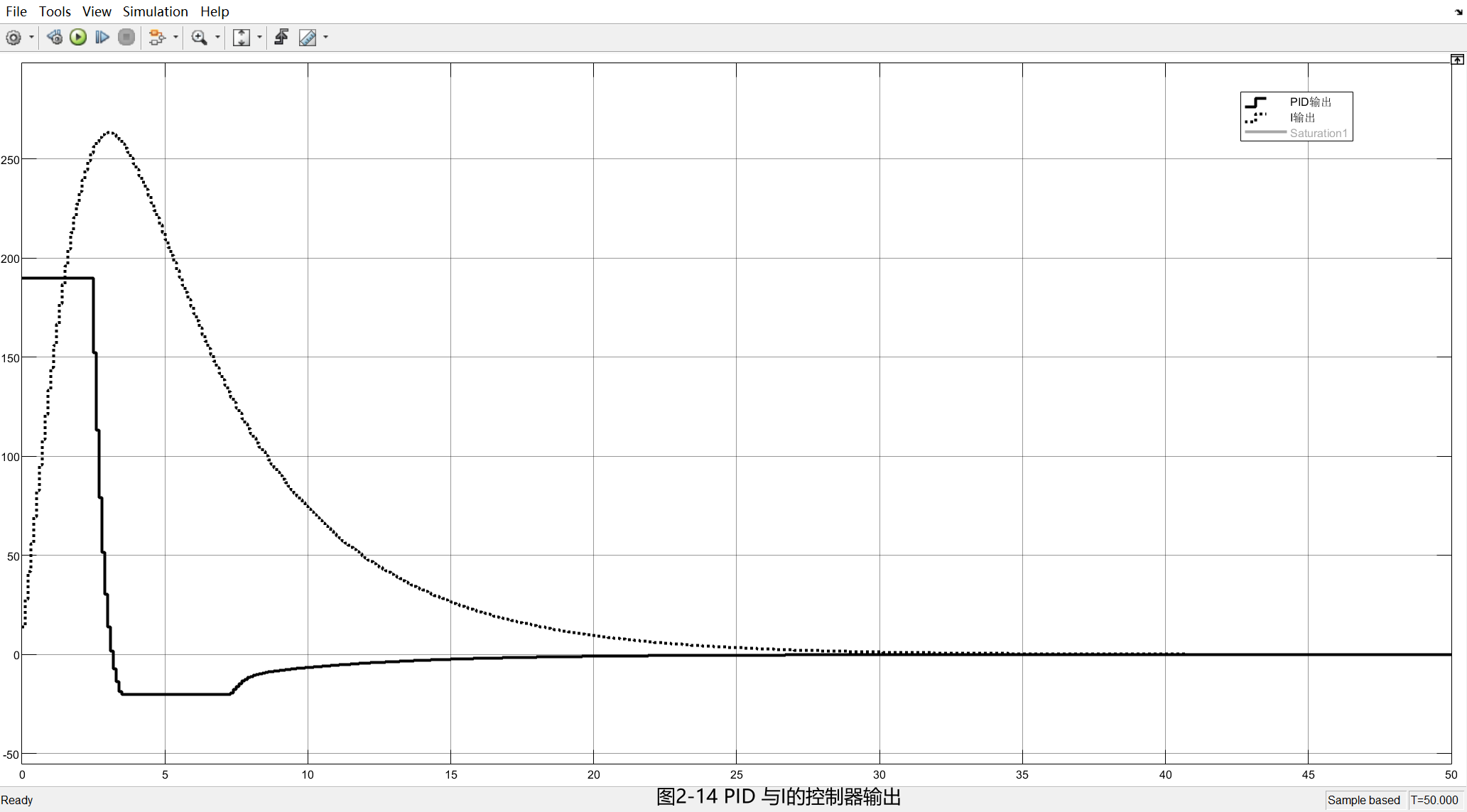
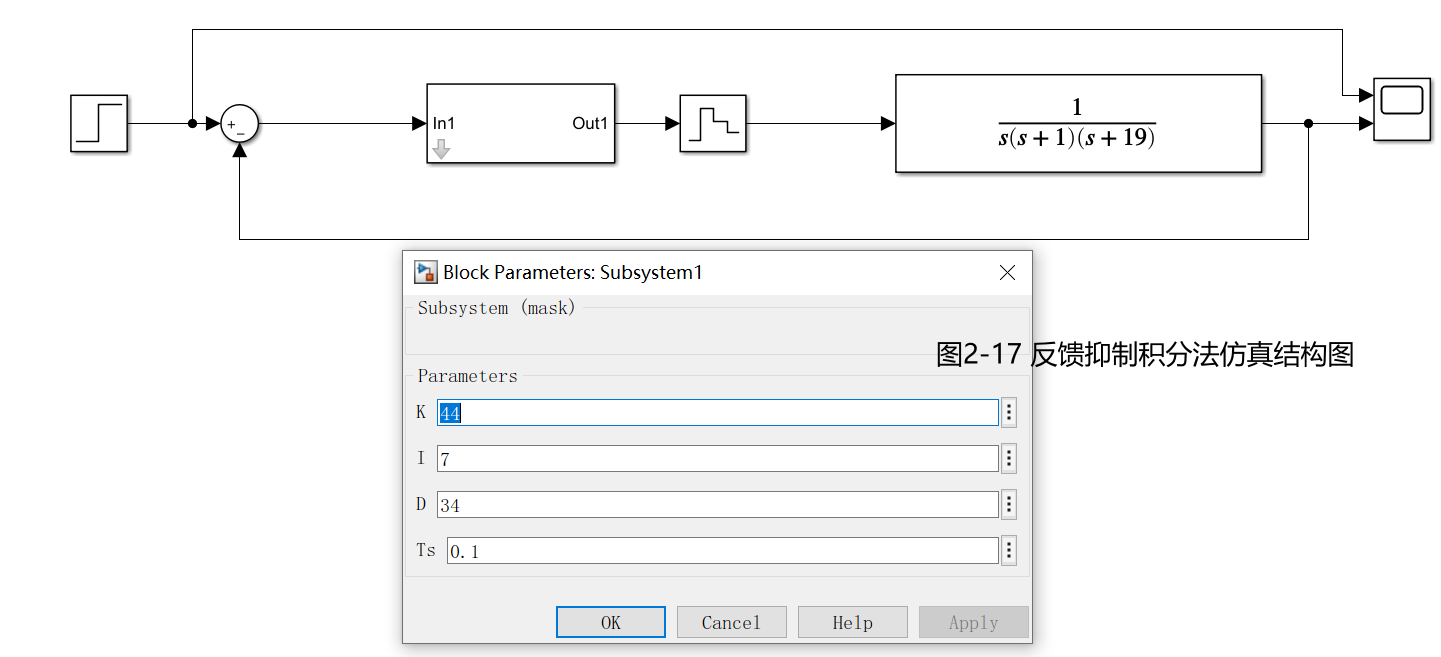
分析:没有稳态误差(积分作用起到了,但是积分量比较大,比实际控制量还大,导致有较大的超调),因而有积分饱和现象。
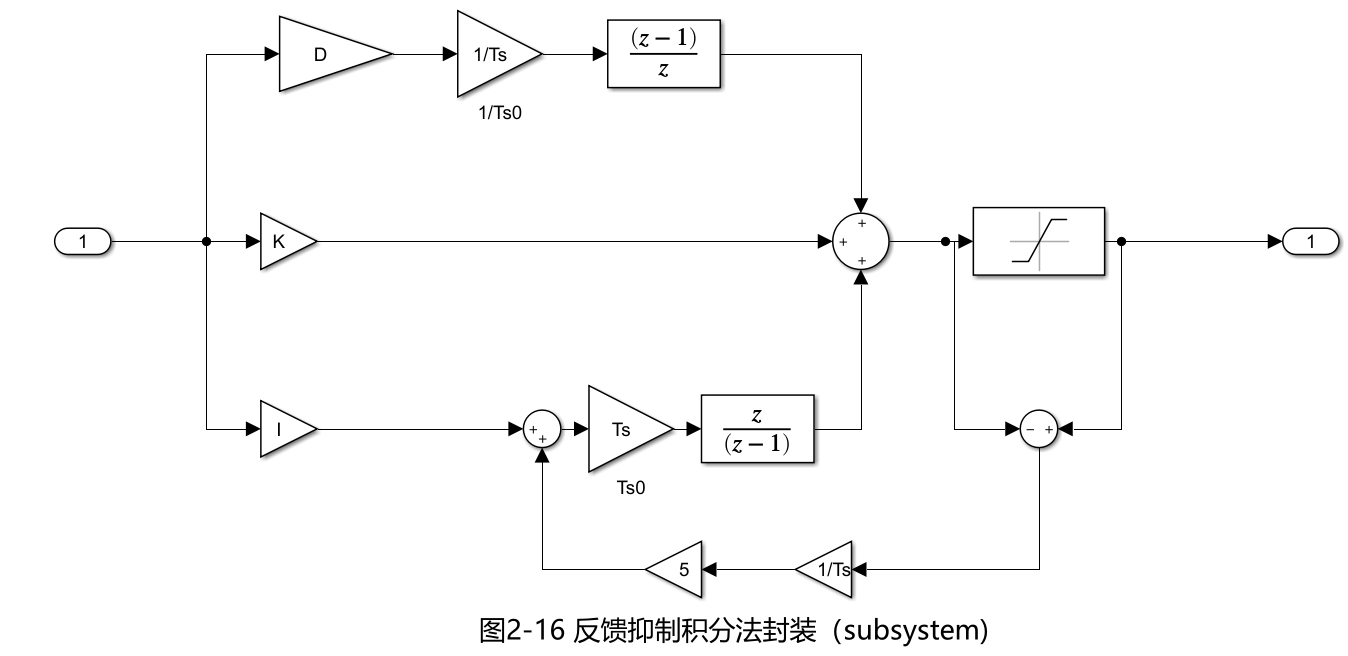
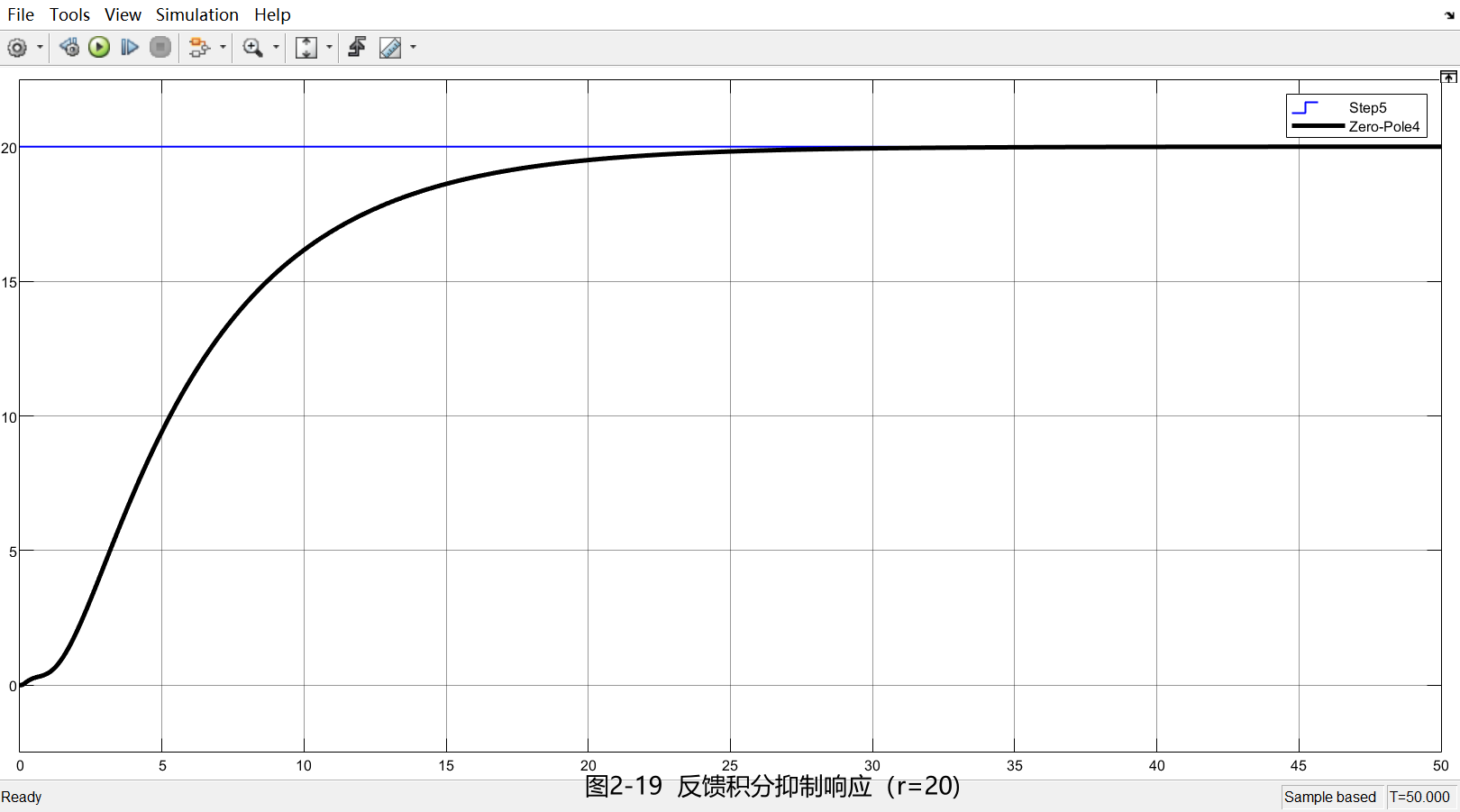
7.反馈抑制积分法
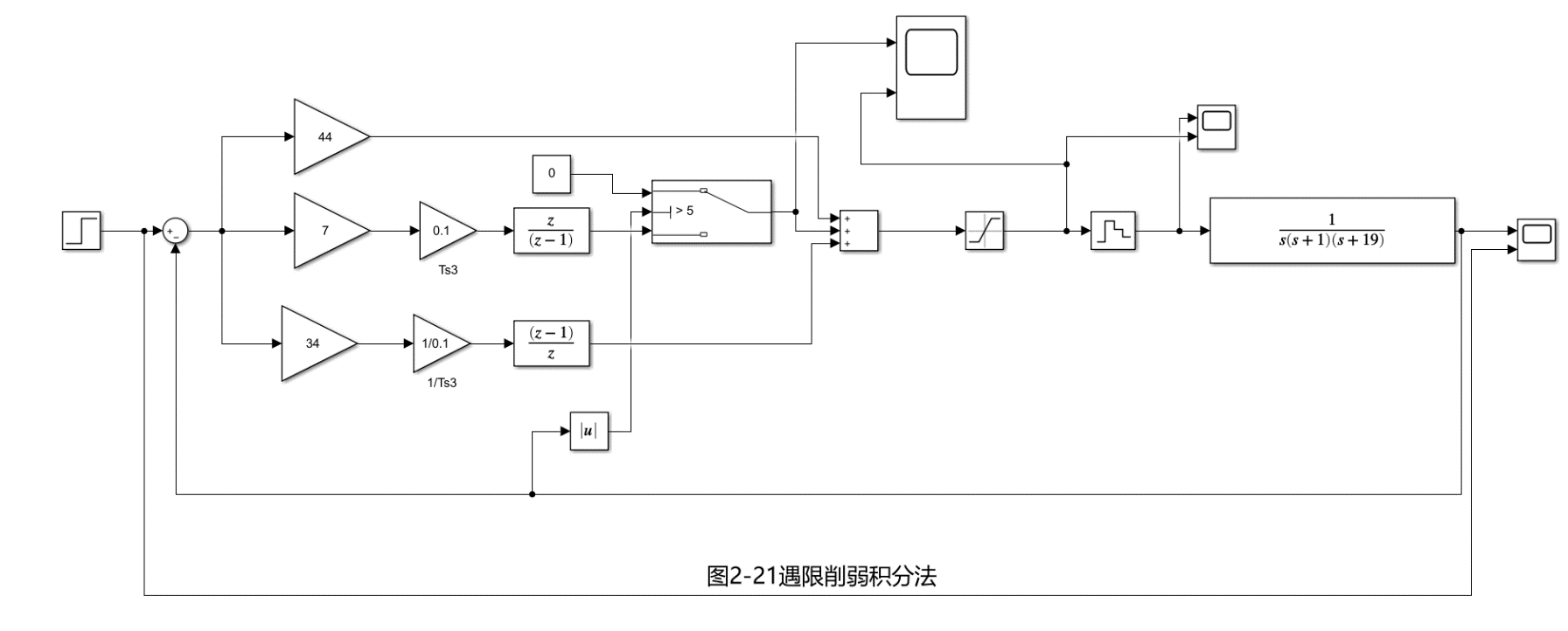
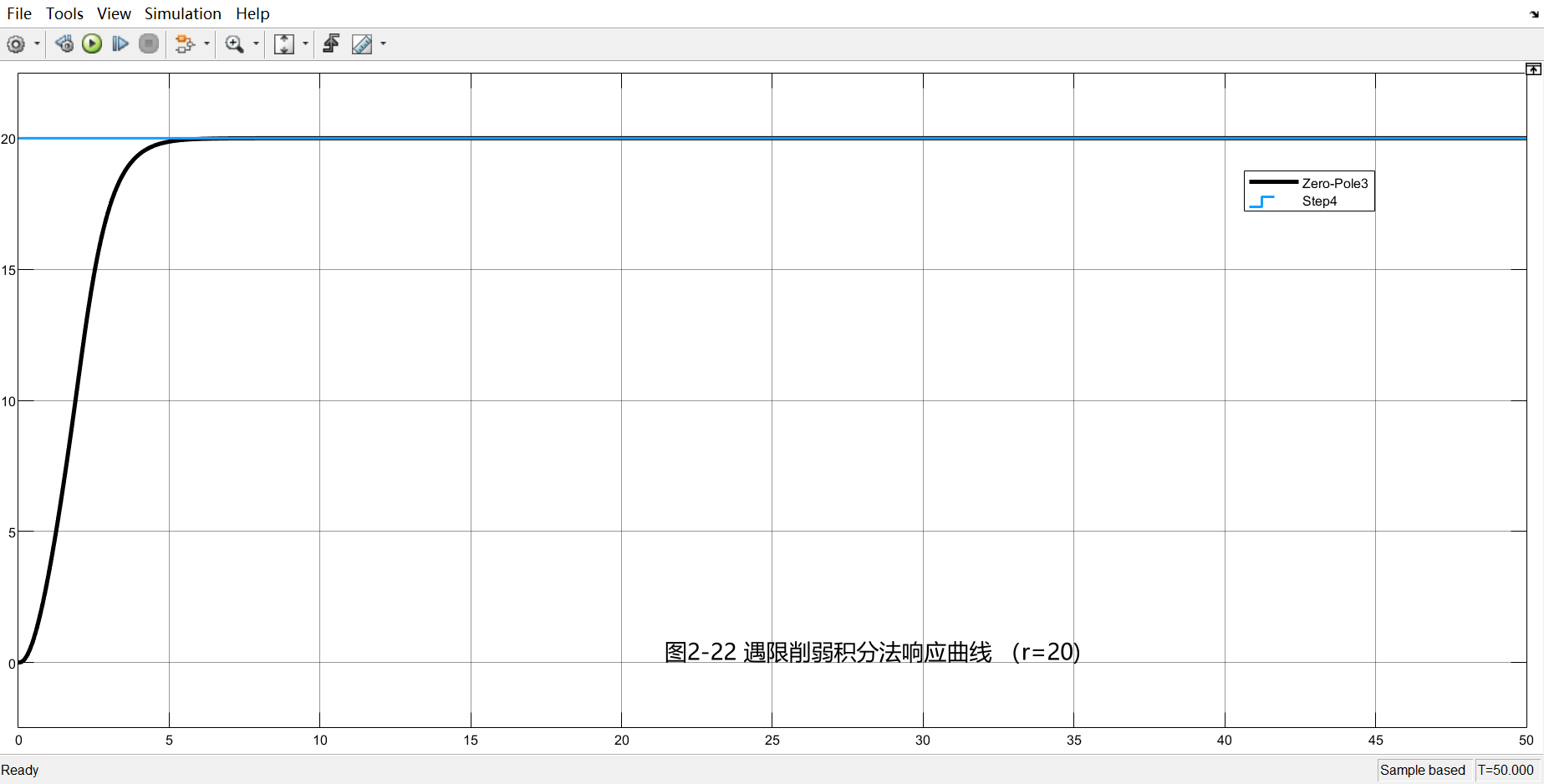
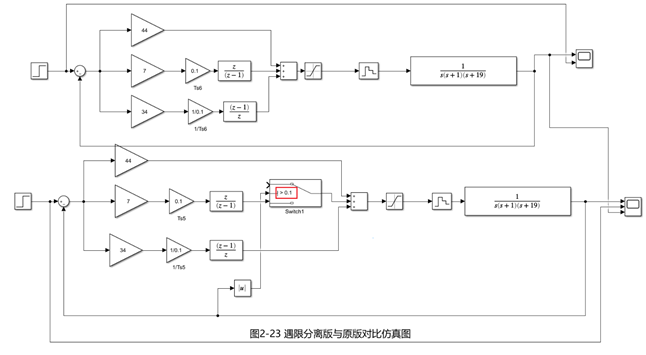
8.遇限削弱积分法
设积分分离的门槛值为em![]() ,,则积分分离PID控制算法可表达为下式:
,,则积分分离PID控制算法可表达为下式:
![]()
其中:
![]()
![]()
对于r=20 这里取em=5;
对于r=1 这里取em=0.2;
四、实验分析与结论
1.PID参数整定的方法(根据经验):
增大比例系数Kp一般将加快系统的响应,在有静差的情况下有利于减小静差。但Kp过大会使系统有较大的超调,并产生振荡,使系统稳定性变坏。
增大积分时间Ti有利于减小超调,减小振荡,使系统更加稳定,但系统静差的消除将随之减慢。
增大微分时间Td有利于加快系统响应,使超调量减小,稳定性增加,但系统对扰动的抑制能力减弱,对扰动有较敏感的响应。
由于ZN公式整定出的结果出现了较大的超调量(超过了20%),发现是由于整定的PI值过大了,所以一部到位,把PI的值整定得比较小,但D的值小幅度改动,最终整定的结果在超调(5%-10%),上升时间(1-2s)恢复时间较长(20-30s).
2、性能分析
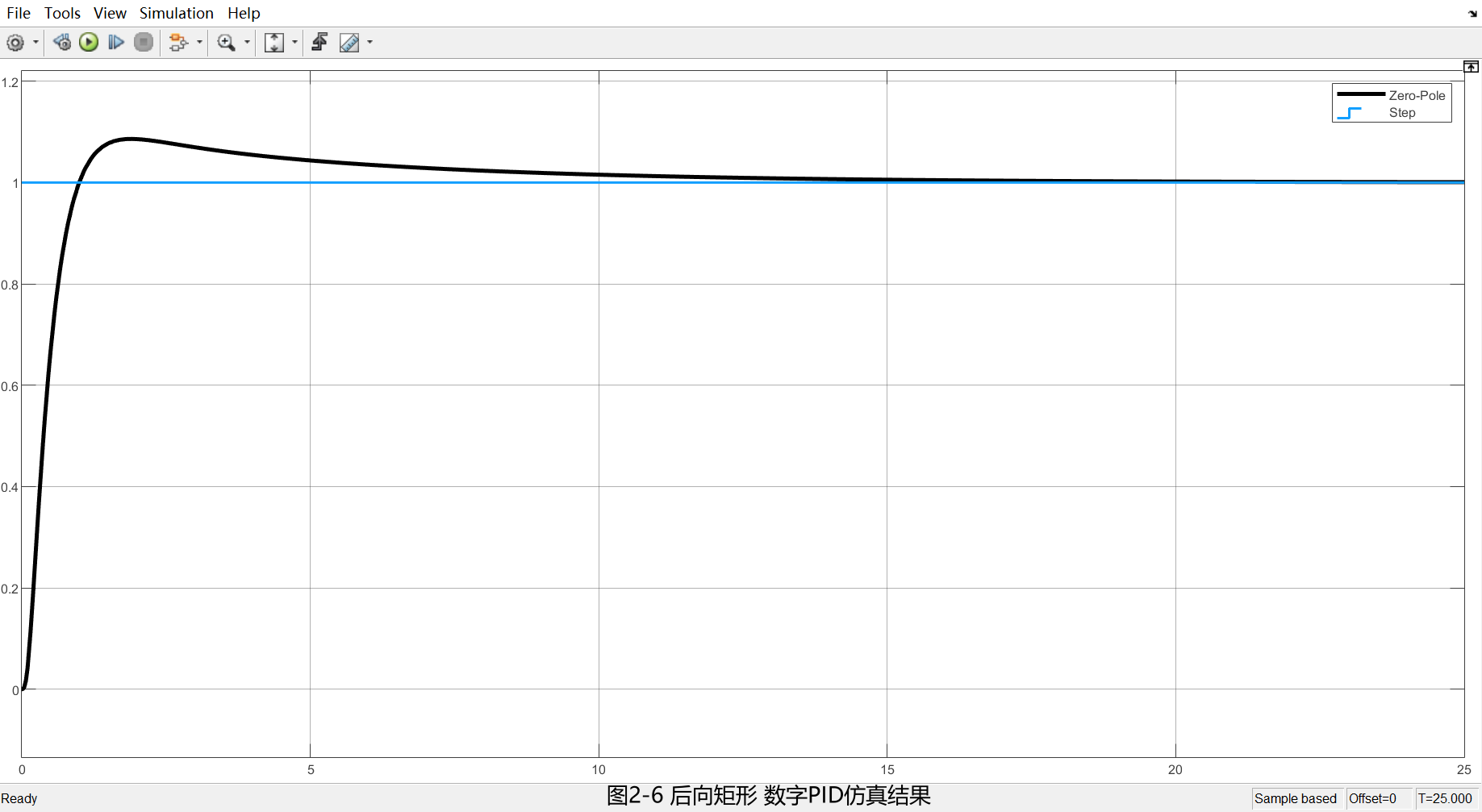
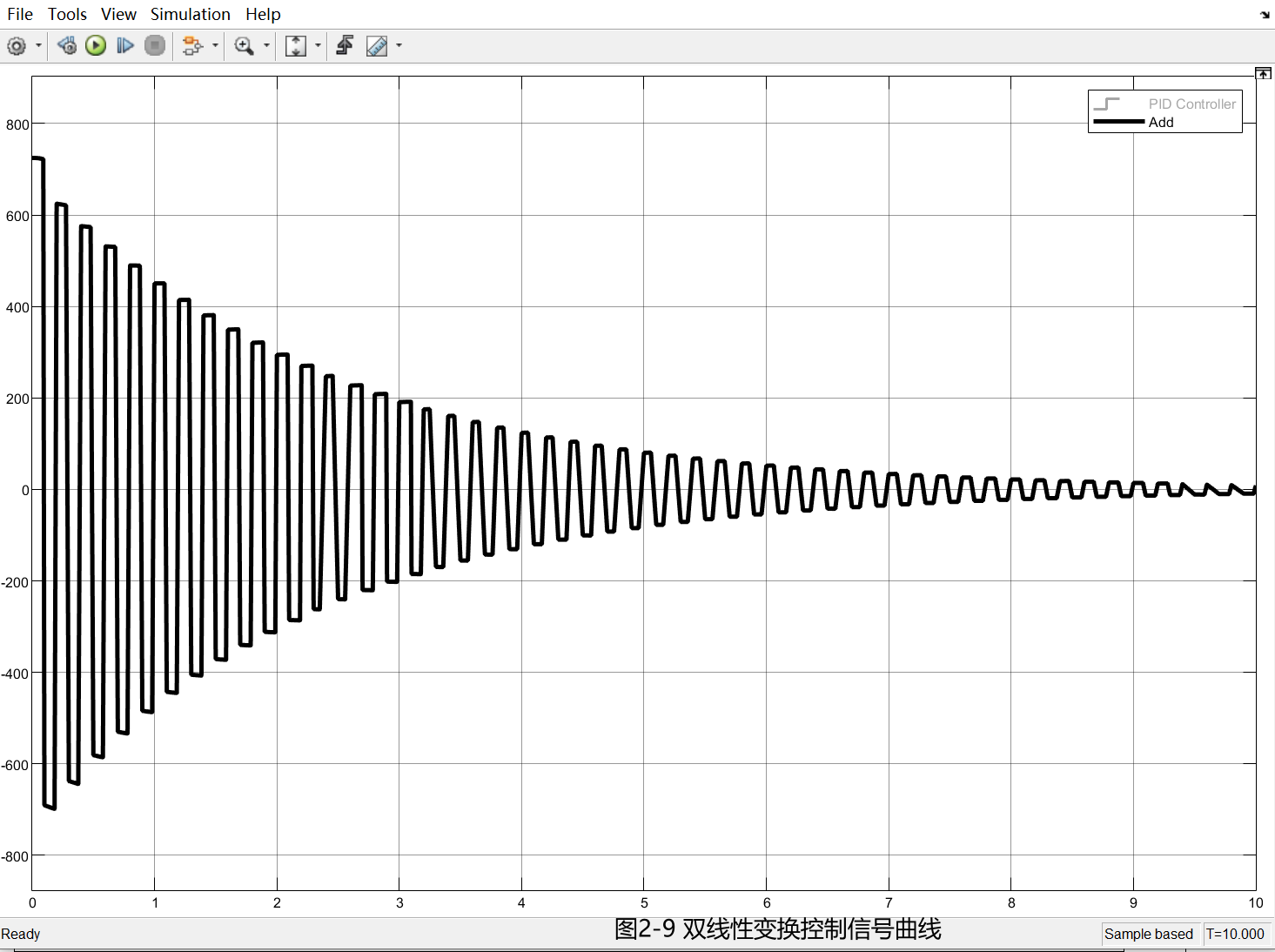
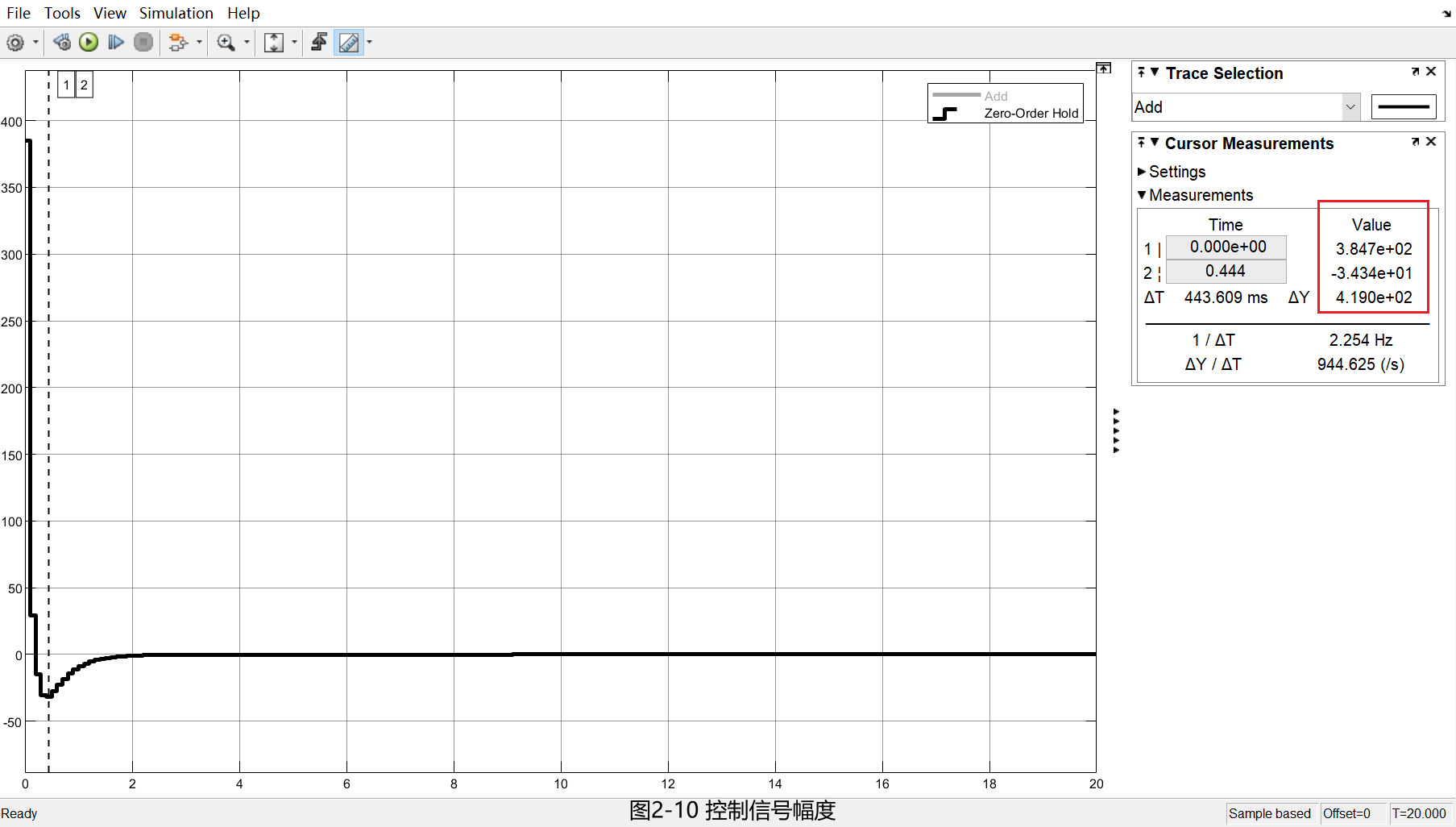
(1)后向差分数字PID控制信号和模拟PID的比较类似,而双线性变换的控制信号对称分布,比较特别。
(2)后向差分将模拟PID转换为数字PID控制信号的时候,响应曲线有一定的变化(如超调变小,上升时间短了)。
(3)后向差分设计的数字PID在面对较大的给定时,能消除稳态误差,但是有积分饱和现象,因此需要使用抗积分饱和措施进行整定。
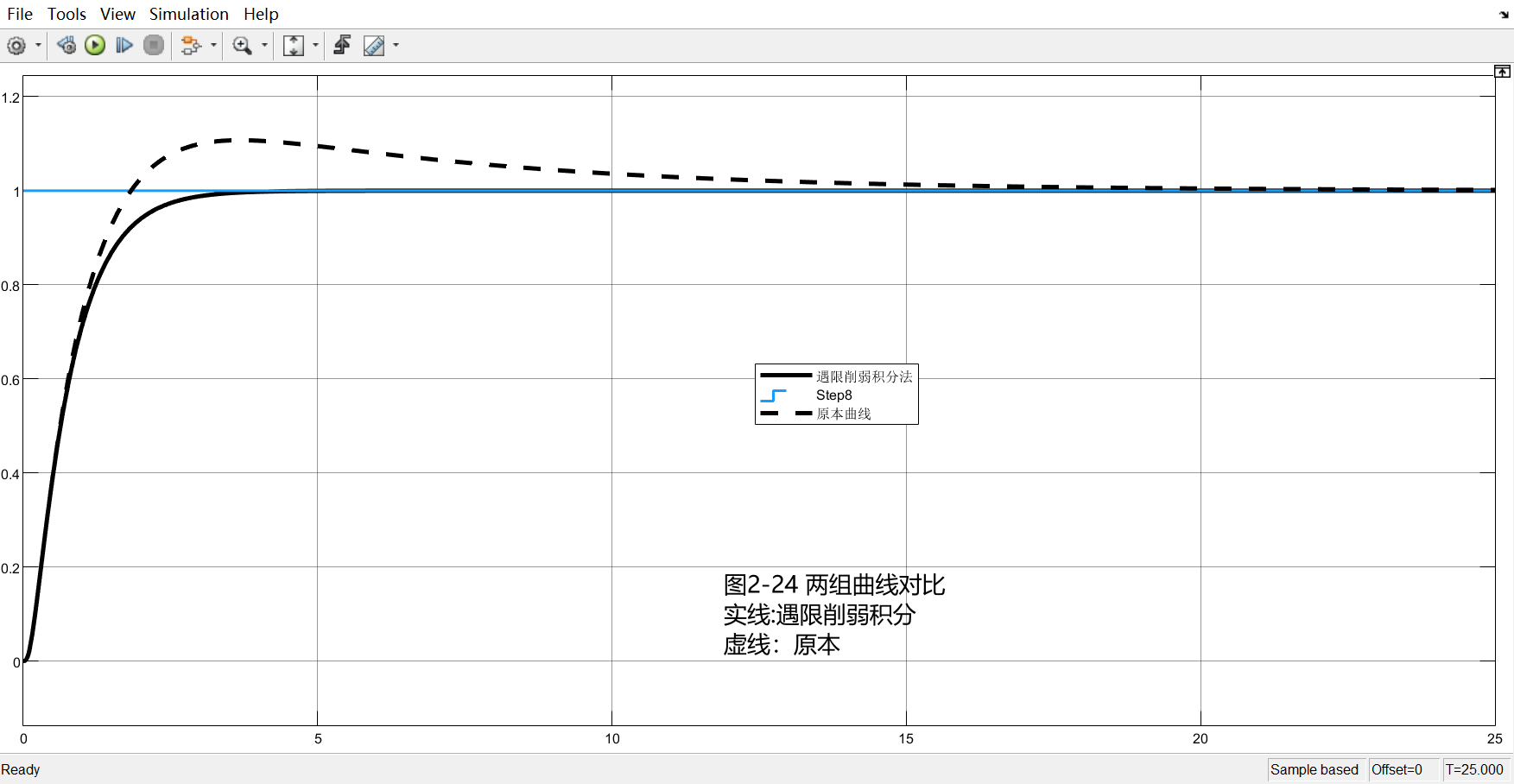
(4)遇限削弱积分法的性能十分优秀,遇限削弱积分法就是给积分量设置上限,那么这个门限em设置多少合适?要考虑两个方面。一是此门限要够小,以使积分饱和能够及时退出。二是不能太小,否则积分器无法完全消除静差。这里设置差不多20%的稳态值。
(5)反馈抑制积分法性能也还行,就是有些小问题(可能是搭建时出了点小问题)。
3、存在不足
(1)对于原理不是很了解,导致在模拟PID转换为数字PID时走了不少弯路,一度以为采样时间是simulink模块里面设置的,结果不是,是要自己去引进去。
(2)调节PID策略过于激进,导致后来曲线变化基本没有对参数进行进一步调整(因为性能还行)。
(3)对于simulink的有些模块使用不是很熟悉。
4、总结
数字PID控制算法的原理和参数整定方法是一门大学问。
最后
以上就是文静纸飞机最近收集整理的关于数字式PID控制MATLAB仿真一.目的二.内容三.实验过程与结果四、实验分析与结论的全部内容,更多相关数字式PID控制MATLAB仿真一.目内容请搜索靠谱客的其他文章。








发表评论 取消回复