简介:安装部署无人驾驶虚拟仿真平台,通过键盘控制仿真小车移动,简单介绍仿真环境切换以及自制方法
基础环境:ubuntu20.04,python3.8.10
1、安装git、pip3
$ sudo apt install git -y
$ sudo apt install python3-pip -y
2、下载gym-duckietown源码
$ git clone https://github.com/duckietown/gym-duckietown.git
3、安装gym-duckietown
$ cd gym-duckietown
$ pip3 install -e .
4、运行模拟器
1)默认环境(udem1)
$ python3 manual_control.py --env-name Duckietown
2)指定地图
$ python3 manual_control.py --env-name Duckietown --map-name mapname
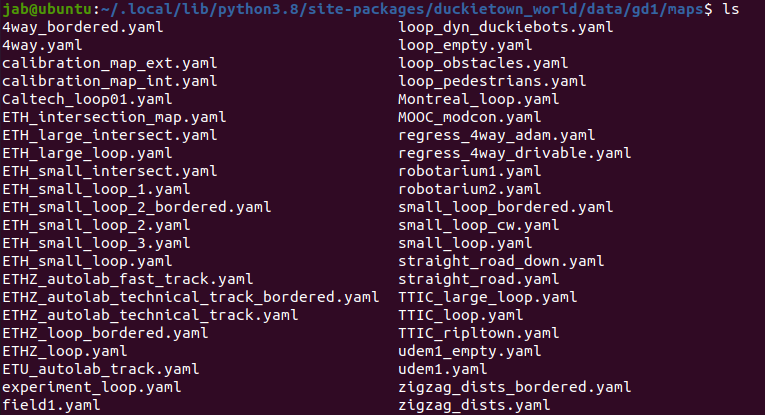
mapname:udem1、4way、small_loop、loop-empty、straight_road、loop_obstacles、zigzag_dists、loop_dyn_duckiebots等,更多地图可查看目录:~/.local/lib/python3.8/site-packages/duckietown_world/data/gd1/maps
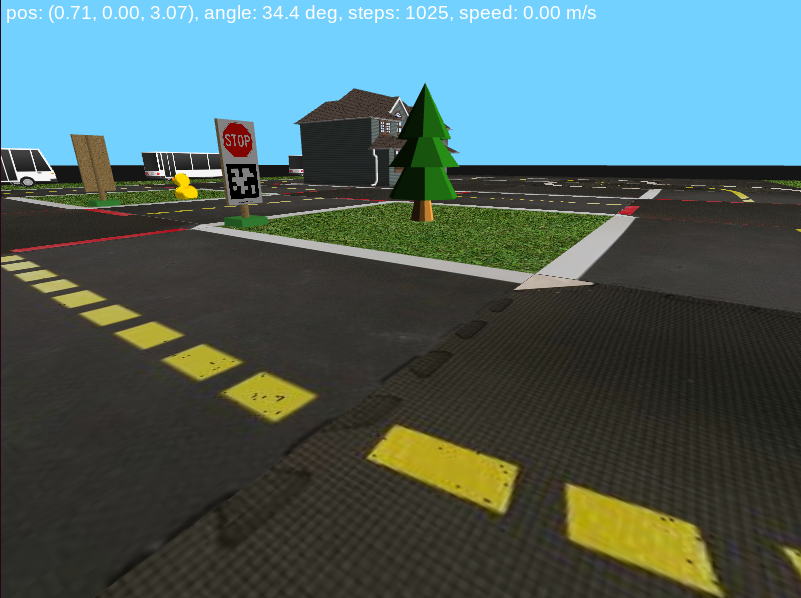
3)模拟器中,可通过↑↓←→按键操作小车行走,Enter键截图当前视野,保存到当前目录下的screen.png,Esc退出模拟器。
5、模拟器地图文件相关说明
1)地图文件格式:yaml
2)地图文件保存路径:~/.local/lib/python3.8/site-packages/duckietown_world/data/gd1/maps
3)地图路面贴图路径:~/.local/lib/python3.8/site-packages/duckietown_world/data/gd1/textures/tiles-processed/photos

4)地图路面对象模型文件路径:~/.local/lib/python3.8/site-packages/duckietown_world/data/gd1/meshes

6、自制地图环境
一个地图文件内容格式类似下图:
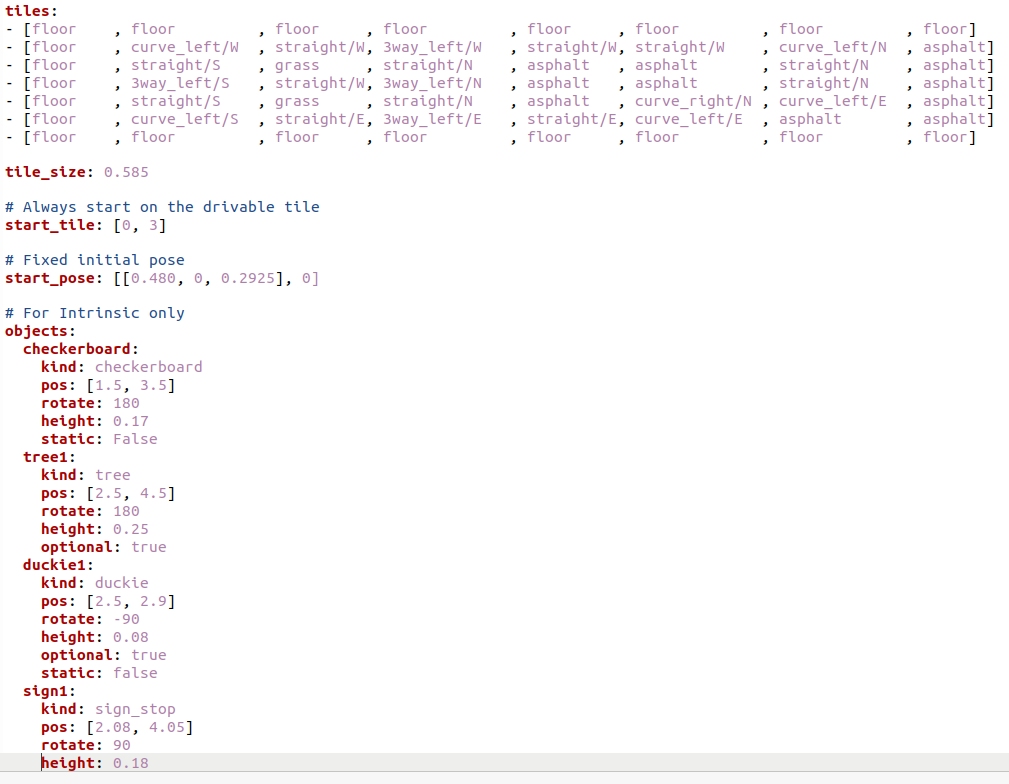
6.1.地图文件字段说明
1)titles:地图路面清单,包含以下几种类型
straight:直线路面,两侧白线,中间黄色虚线(后缀加/+E/S/W/N可指定路面方向指向)
curve_left:左转弯(后缀加/+E/S/W/N可指定路面入口指向)
curve_right:右转弯(后缀加/+E/S/W/N可指定路面入口指向)
3way_left:左转丁字路口(后缀加/+E/S/W/N可指定路面直线方向指向)
3way_right:右转丁字路口(后缀加/+E/S/W/N可指定路面直线方向指向)
4way:十字路口
calibration_tile:棋盘格
floor:空白地面,默认草绿色
grass:空白地面,默认草绿色
asphalt:空白地面,默认黑色路面
2)tile_size:每块地图尺寸,默认0.585米。
3)start_tile:初始化小车地图块坐标(最小为[0,0]),例:[1,3],表示小车重置位置时出现在第2行第4列的地图块上。
4)start_pose:初始化时小车在地图块上的位置,例:[[0.480, 0, 0.2925], 0],0.480表示前后位置,0代表上下(此处无意义),0.2925表示左右位置,0表示旋转弧度。
5)objects:路面障碍物及景观清单(每一个物体称之为一个对象(object)),主要包含以下对象类型:
barrier:水泥障碍
building:多层建筑
bus:公共汽车
checkerboard:棋盘格立方体
cone:路障
duckie:小黄鸭
duckiebot:小车
house:房子
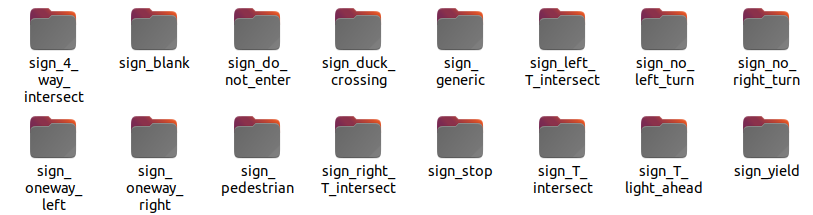
signs:交通标志牌,
trafficlight:交通灯(红绿灯)
tree:树
truck:货车
其中,signs交通标志牌细分为停止、慢行、T型路口、十字路口、单行道、避让等不同的标志,具体如下:
6)路面障碍物及景观属性字段说明
kind:类型,参考上文objects类型。
pos:对象坐标,单位为地图块,例:[1.5, 3.5]表示对象坐标为地图块第2行中心 与第4列中心交叉点。
rotate:旋转角度,单位为角度(°)
height:对象高度,单位米
static:是否为静止对象,只对duckie、duckiebot和checkerboard有效,其他景观不能添加此属性,其中,duckie对象非静止状态表现为间隔固定时间,穿越面向的马路,穿越距离默认为0.585,即一个地图块的宽度,固定时间后反向返回原地;duckiebot非静止状态表现为沿当前道路行驶,然后直到行驶至最外圈,然后沿着外圈巡航。
上一篇 :无 下一篇:无人驾驶虚拟仿真(二)--ROS系统安装
最后
以上就是悲凉小熊猫最近收集整理的关于无人驾驶虚拟仿真(一)--环境搭建1、安装git、pip32、下载gym-duckietown源码3、安装gym-duckietown4、运行模拟器5、模拟器地图文件相关说明6、自制地图环境的全部内容,更多相关无人驾驶虚拟仿真(一)--环境搭建1、安装git、pip32、下载gym-duckietown源码3、安装gym-duckietown4、运行模拟器5、模拟器地图文件相关说明6、自制地图环境内容请搜索靠谱客的其他文章。








发表评论 取消回复