学习《A Tutorial on Joint Radar and Communication Transmission for Vehicular Networks - Part II: State of the Art and Challenges Ahead》笔记
名词注释
State-of-the-art (SoA):最先进技术
Vehicle-to-everything (V2X):车联万物
Global Navigation Satellite System (GNSS):全球导航卫星系统
Massive multi-input multi-output (mMIMO):大规模多输入输出
Vehicle-to-infrastructure (V2I):车联基站
Channel state information(CSI):信道状态信息
Angel of arrival(AoA):到达角
Angel of departure(AoD):偏离角
Extended Kalman filtering(EKF):扩展卡尔曼滤波
Auxiliary beam pair(ABP):辅助波束对
Base station(BS):基站
Uniform linear array(ULA):均匀线性阵列
Road side unit(RSU):道路侧单元
Radar cross-section(RCS):雷达横截面
Cumulative distribution function(CDF):累积分布函数
V2X DFRC
①DFRC旨在联合优化车辆通信性能与兼具定位与感知的遥感性能。
②V2X的应用场景中关键技术的时延要求在数十毫秒,传统通信技术的时延在数百毫秒;V2X的车辆定位与环境感知具有高分辨率的要求,GNSS的感知精度差,传输速率低,无法满足V2X的要求。
③通信过程中,需要建立可靠的通信链路来保护QoS。传统方法是通过通信协议,利用信令与导频的频繁反馈来完成波束的训练与跟踪,但是难以满足高移动性的V2X网络。利用雷达传感辅助通信的DFRC方法相较于传统方法,时延更低,频谱利用率更高,是推进V2X网络的关键技术。
波束训练与追踪
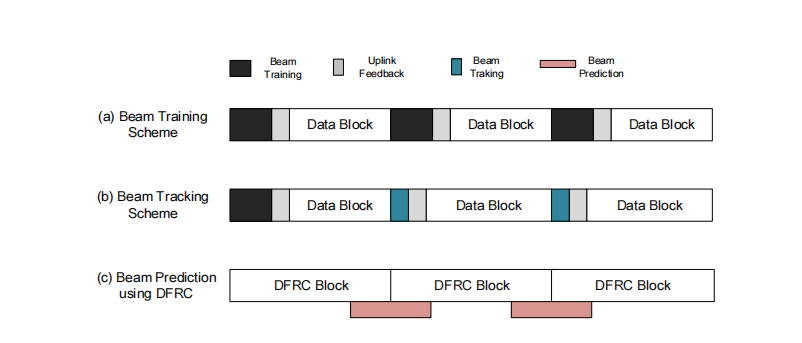
①mmWave CSI包括AoA,AoD,信道增益
②波束训练:Tx发送多束导频,Rx选取SNR较大的波束,估计CSI并反馈给Tx,根据CSI,Tx、Rx分别制定发射波束成型器与接收波束成型器。传统波束训练需要权衡估计精度与导频开销。传输更多的导频会获得更高的精度,提高信道增益与信噪比,但是会增加传输的成本与时延,在高移动性的V2X网络中会引起波束错位从而造成性能损失。
③波束追踪:波束追踪在开始时同样需要进行波束训练,但在随后的信息块中只需发送导频来追踪信道的变化。
ABP波束追踪技术
①技术应用场景:具有Nt个发射天线的mMIMO基站在LoS信道中为单天线用户提供服务。
②技术目标:通过BS已知的用户第n-1个epoch中的来预测第n个epoch中的
。
③ABP技术使用波束成形器与
形成导频
与
,导频在用户端接收可表示为
、
![]()
其中α为LoS信道的信道系数,a()为BS的转向向量,
与
均为方差为
的高斯白噪声
假设基站ULA具有半波长间距并且用表示-π·cos(
),可将转向向量a(
)表示为下式
![]()
由于与
具有时间相关性,两者相距不远,故可根据特性设计波束成形器为
![]()
令导频信号为1来计算用户端接收信噪比,通过信噪比来计算,从而在已知
的情况下求出

通过=arccos(
) 求得
,在接收信噪比均为完全估计时
=
④此方法以少量的导频完成了波束追踪但进行了大量的上行反馈,并且具有一定的估计误差,不适合高移动性的V2X网络。
DFRC技术
①应用场景:具有Nt个发送天线与Nr个接收天线的mmWaveRSU与匀速车辆通过LoS信道通信,假设天线阵列均为ULA并且与道路平行,此时AoA与LoS路径上的AoD相同。
②RSU为车辆传输DFRC窄波信号s(t),车辆接收阵列在接收信号的同时,车身反射回波,在第n个·epoch中RSU接收到回波信号,估计得到
RSU接收到的回波表达式如下:
![]()
其中 为阵列增益,
为RCS与路径损耗,
为径向速度产生的多普勒频率,a(
)与b(
)分别为发射转向矢量与接收转向矢量,
为发射波束成形器
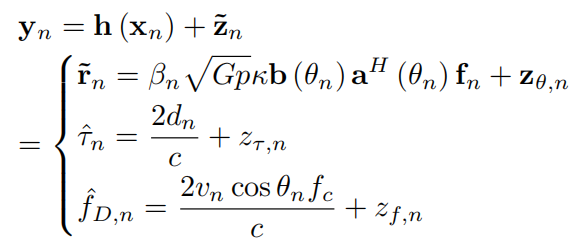
③RSU发射的窄波信号在车辆处接收信号可表示为下式:
![]()
其中为信道系数,
为接收波束成形器,
为车辆的数组响应向量,
为DFRC的AoA,在假设场景中等同于AoD的
④ 基于与模型,RSU预测
与
用于RSU的发射波束形成与车辆的接收波束成形。RSU通过匹配滤波器将
与s(t)匹配得到
与
用于补偿
,从而得到
![]()
G为匹配滤波增益(通常为s(t)的能量)
RSU的估计结果可用表示
可以通过拓展卡尔曼滤波器获得
,用于预测
与
,预测模型如下式:
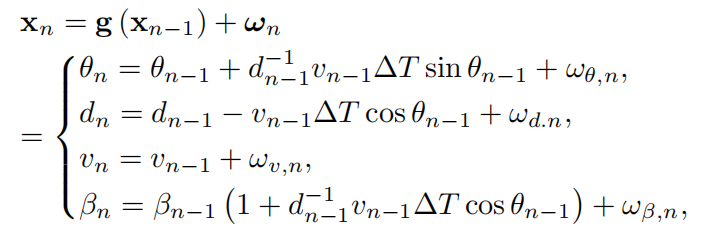
其中为状态噪声
重点:基于,RSU建立
,用于下一epoch的发送波束成形;基于
,车辆接收端建立
,用于下下epoc的接收波束成形。由于迭代估计来形成高质量的通信链路。
⑤DFRC技术相比单一通信的优势:
A:DFRC的s(t)兼顾通信与传感,减少了导频,提升了雷达估计的精度
B:使用目标反射回波代替上行反馈,减少了通信开销
C:单一通信需要在反馈前量化角度,DFRC直接使用回波估计,减少了估计误差
D:DFRC用信号进行雷达传感,受益于匹配滤波增益G,精度高于仅适用有限导频进行传感。
⑥现阶段面临问题
A:模型非线性:EKF在面对复杂车辆信号时性能会有所下降,需探索更多可以进一步提升波束跟踪性能的方法
B:依赖于状态转换模型:现阶段,车辆角度的变化由状态转换模型预测,在复杂交通环境中模型形成困难
C:波束关联:DFRC采用信号回波进行传感,但回波中不能添加信息,需要开发波束关联算法将回波关联到正确的目标
总结
这篇论文的第二部分主要讲了传统通信的波形训练与追踪,讲述了ABP波束追踪技术,详细介绍了DFRC运用雷达传感辅助通信的技术,并且量化了性能,展现了DFRC在V2X网络中的关键作用。
知识输出促进消化,意在记录学习过程,希望大佬们看到错误可以指出。
最后
以上就是超级火车最近收集整理的关于无痛学习ISAC(三)名词注释 V2X DFRC波束训练与追踪DFRC技术总结的全部内容,更多相关无痛学习ISAC(三)名词注释 V2X内容请搜索靠谱客的其他文章。






![[论文笔记]Integrated Networking, Caching, and Computing for Connected Vehicles: A DRL Approach结论及未来工作介绍系统描述系统模型深度强化学习问题建模仿真结果与讨论](https://www.shuijiaxian.com/files_image/reation/bcimg9.png)

发表评论 取消回复