1.完整代码地址:
链接:https://pan.baidu.com/s/1bV7ImmrRmee7KBQRKdQX6Q
提取码:x8hn
2.理论部分:
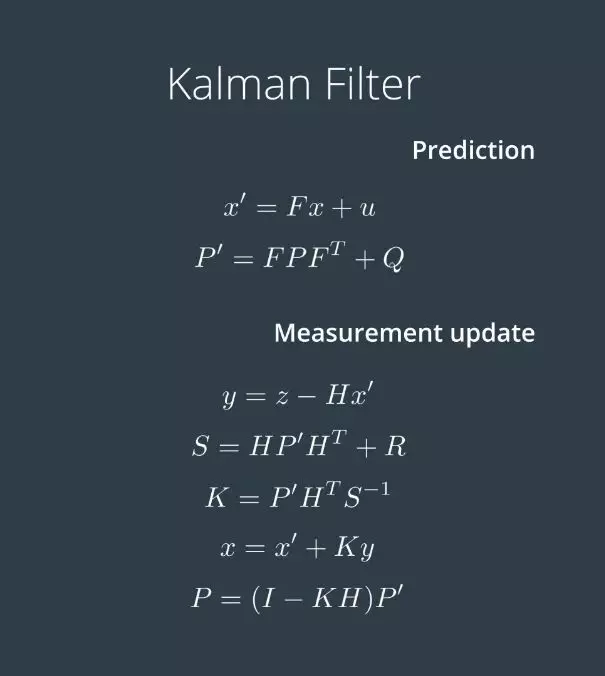
3.代码部分
(1)初始化(initialization)
使用Eigen库中非定长的数据结构,下图中的VerctorXd表示X维的列矩阵,其中的元素数据类型为double。
#include "Eigen/Dense"
class KalmanFilter {
public:
KalmanFilter()最后
以上就是心灵美薯片最近收集整理的关于传感器融合-Lidar and Radar Sensorfusion源码解读的全部内容,更多相关传感器融合-Lidar内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复