我是靠谱客的博主 大方草莓,这篇文章主要介绍Matlab自动驾驶工具箱(3)-路径规划与控制-checkPathValidity1、作用2、语法3、描述4、实例-路径规划并检查其有效性5、输入输出,现在分享给大家,希望可以做个参考。
Matlab自动驾驶工具箱(3)-路径规划与控制-checkPathValidity
- 1、作用
- 2、语法
- 3、描述
- 4、实例-路径规划并检查其有效性
- 5、输入输出
1、作用
checkPathValidity
检查车辆规划路径的有效性
2、语法
isValid = checkPathValidity(refPath,costmap)
isValid = checkPathValidity(refPoses,costmap)
3、描述
isValid = checkPathValidity(refPath,costmap)根据车辆costmap图检查规划的车辆路径refPath的有效性。使用此功能可以测试在变化的环境中路径是否有效。
如果满足以下条件,则路径有效:
- 该路径至少具有一个姿势。
- 该路径无冲突且在costmap的限制内。
isValid = checkPathValidity(refPoses,costmap)根据车辆costmap图检查一系列车辆姿态refPoses的有效性。
4、实例-路径规划并检查其有效性
通过使用最佳快速探索随机树(RRT *)算法来规划穿过停车场的车辆路径。检查路径是否有效,然后沿着路径绘制过渡姿势。
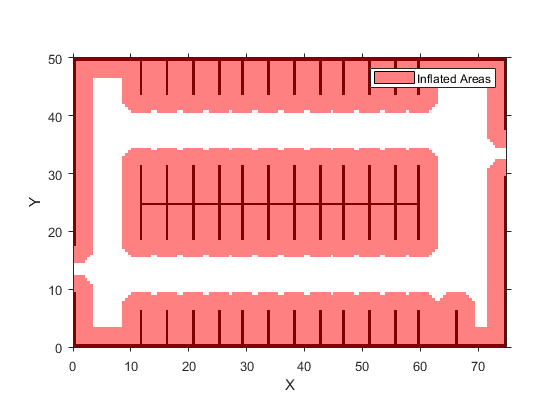
- 加载停车场的costmap图。查看costmap图以查看停车场和车辆应避免的区域。
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)
- 将车辆的起始姿势和目标姿势定义为[x,y,Θ]矢量。 (x,y)位置的世界单位以米为单位。 Θ方位角的世界单位以度为单位。
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0];
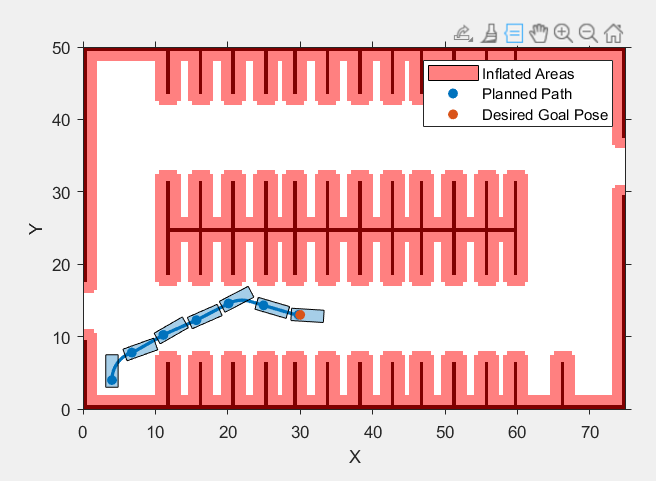
- 使用pathPlannerRRT对象来规划从起始姿势到目标姿势的路径。
planner = pathPlannerRRT(costmap);
refPath = plan(planner,startPose,goalPose);
- 检查路径是否有效。
isPathValid = checkPathValidity(refPath,costmap)
有效案例:
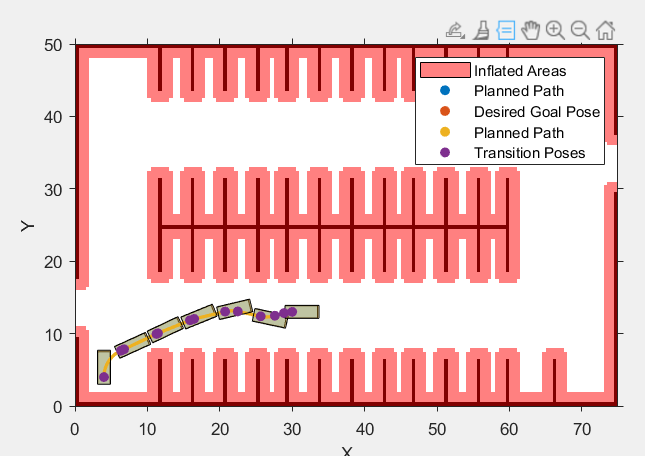
- 沿路径插入过渡姿势。
transitionPoses = interpolate(refPath);
- 在成本图上绘制规划路径和过渡姿势。
hold on
plot(refPath,'DisplayName','Planned Path')
scatter(transitionPoses(:,1),transitionPoses(:,2),[],'filled', ...
'DisplayName','Transition Poses')
hold off
5、输入输出
输入来自于refPath、costmap、refPoses
输出为isValid(0|1)
最后
以上就是大方草莓最近收集整理的关于Matlab自动驾驶工具箱(3)-路径规划与控制-checkPathValidity1、作用2、语法3、描述4、实例-路径规划并检查其有效性5、输入输出的全部内容,更多相关Matlab自动驾驶工具箱(3)-路径规划与控制-checkPathValidity1、作用2、语法3、描述4、实例-路径规划并检查其有效性5、输入输出内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复