无人驾驶车辆横纵向控制(Vertical and horizontal Control)一般采用纵向PID控制方法,横向纯跟踪方法(Pure Pursuit)。高阶算法有线性二次型调节器(LQR)和模型预测控制(MPC),这些在本系列博客中都会讲解,但本节我们趁热打铁,基于无人驾驶车辆控制(二):阿克曼转向来讲解横向控制中常用到的纯跟踪算法(PPC)。
进入正文前先说下,纯跟踪算法中的难点。①在纯跟踪算法中存在一个预瞄距离Ld,并且Generally,是需要调整的。会使用最大,最小前视距离来约束它,越大的前视距离意味着轨迹跟踪越smooth,小的前视距离会使得追踪的轨迹更加精确,但是呢,容易震荡。②拐弯处需要根据转弯大小做适当的减速。③第一个索引点的确定
OK,接下来上硬菜。
一、理论推导
接上周学习的阿克曼转向理论,继续画图推导!
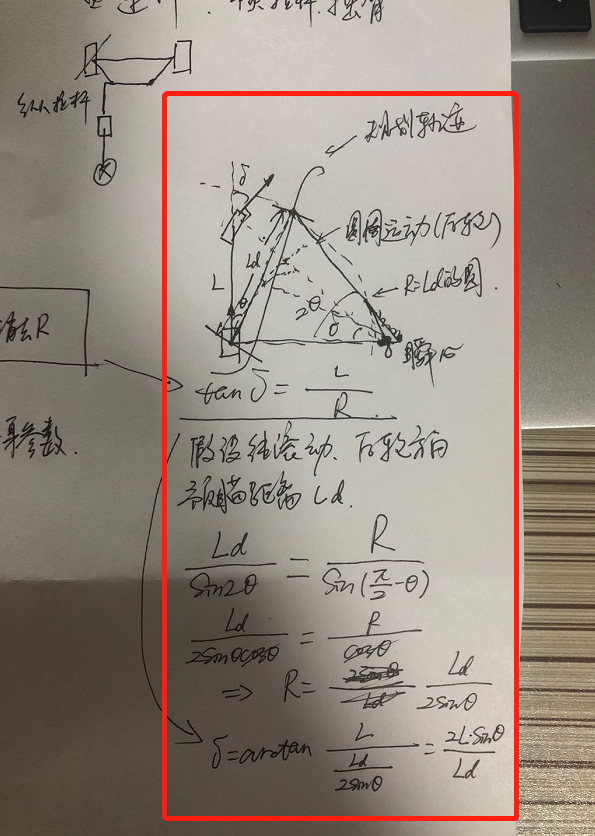
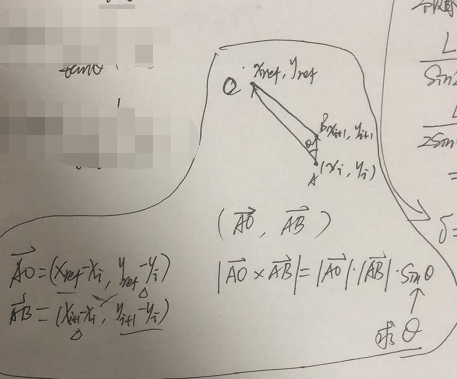
求 前轮转角,需要知道 轴距,theta角和预瞄距离Ld。前面说了,Ld 需要调整,轴距是车辆本身参数可以测量得到,剩下的Theta一般可以由惯性测量单元IMU直接得到车辆的位姿信息(即使没有IMU,也可以通过计算得到。已知k时刻坐标和k+1时刻坐标,参考点坐标。分别从k时刻引出两条向量,求出夹角theta)
也有人说,纯跟踪算法其实就是横向的P调节器。有一定道理,因为Theta很小时,Theta与sin(theta),tan(theta)和arctan(theta)都是等价无穷小,那么前轮转角delta≈2L/Ld乘以theta。那么前轮转角与theta成正比,即为P,P=2L/Ld!
二、代码讲解
本次分别使用matlab,simulink和Python分别实现纯跟踪算法。下次更新simulink搭建纯跟踪模型和ROS系统下小海龟模型轨迹跟踪联合仿真快速验证控制算法(强烈推荐!V流程,MIL→RCP→HIL仿真),还不赶紧关注收藏走一波~
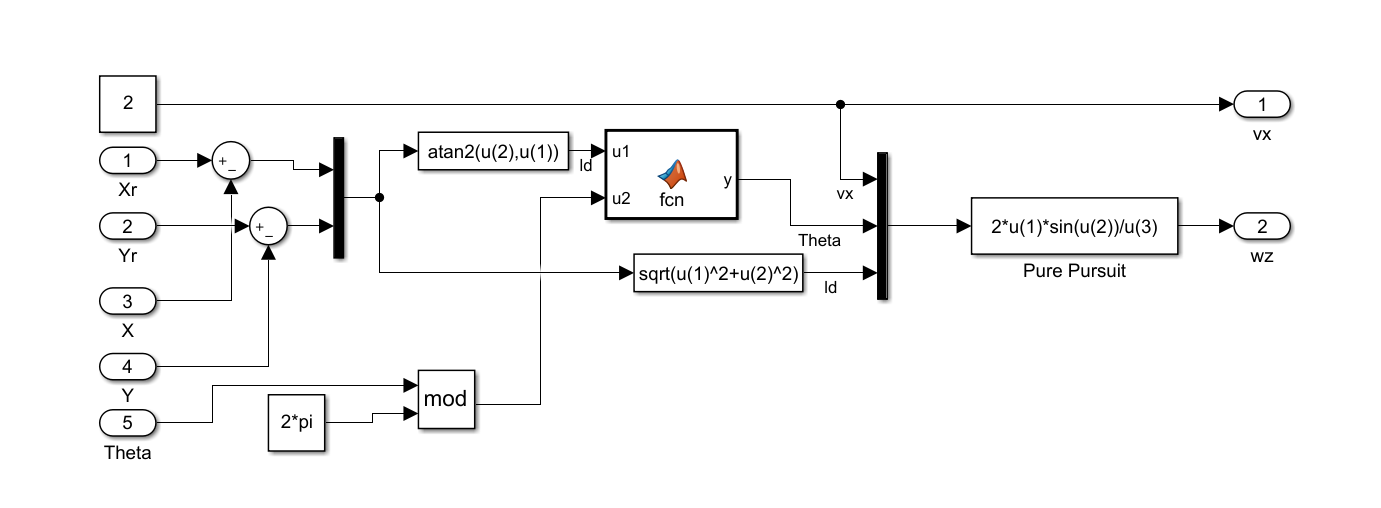
首先,易于理解的Simulink,
然后,网上有男神Adam shan的python代码,见https://blog.csdn.net/AdamShan/article/details/80555174
基于此,写出.m文件,也很简单,不再赘述,后面提供资源下载,供学习参考
最后,Python代码实现。说下思路吧,首先定义Horizon,也就是预瞄距离,先定为6米。然后获取车辆后轴中心点的位置,也就是手绘图中提到的A点,获取局部路径。然后,发布速度指令的Topic:Twist_pub。定义当前车辆pose,velocity和waypoint信息
进入LOOP,更新频率rate设为20Hz。然后判断当前车辆pose,velocity和waypoint信息,计算控制车辆指令TwsitCommand,计算后发布!
那么怎么算呢?就是定义的CalculateTwistCommand
设定lad,累加器,累加到大于预瞄距离Horizon时选取这个路径点作为targetWaypoint。然后获取车辆航向角yaw,和后轮侧偏角alpha,然后计算前轮转角theta。
OK,代码放一起,供参考
https://download.csdn.net/download/yuzistu_CSDN/12866385
最后
以上就是温暖航空最近收集整理的关于无人驾驶车辆控制(三):纯跟踪算法(Pure Pursuit)的全部内容,更多相关无人驾驶车辆控制(三):纯跟踪算法(Pure内容请搜索靠谱客的其他文章。

![[运动控制算法]模型预测控制前言一、基于运动学模型的模型预测控制二、项目演示三、总结四、参考](https://www.shuijiaxian.com/files_image/reation/bcimg7.png)






发表评论 取消回复