
优步提出改善自动驾驶车辆交通运动预测技术,以保证自动驾驶汽车在公共道路上安全行驶。
盖世汽车讯 据外媒报道,优步高级技术小组(ATG)研究人员提出了一种AI技术,以改善自动驾驶车辆交通运动预测,并适用于优步正在开发的无人驾驶技术。据了解,优步的无人驾驶技术必需确保能够探测、追踪和预测周围车辆的轨迹,从而保证自动驾驶汽车在公共道路上安全行驶。
众所周知,如果不能预测道路上其他驾驶员可能做出的决定,车辆就无法实现全自动驾驶。两年前,优步的一辆自动驾驶原型车在亚利桑那州坦佩撞死了一名行人,部分原因是该车没能发现并避开行人。ATG的研究使用生成式对抗网络(GAN)来预测汽车轨迹,据称可将预测精度提高一个数量级。
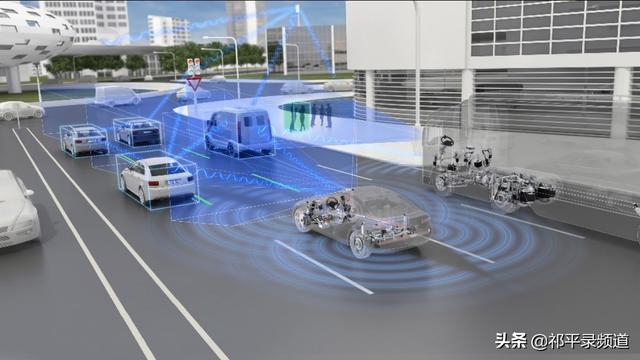
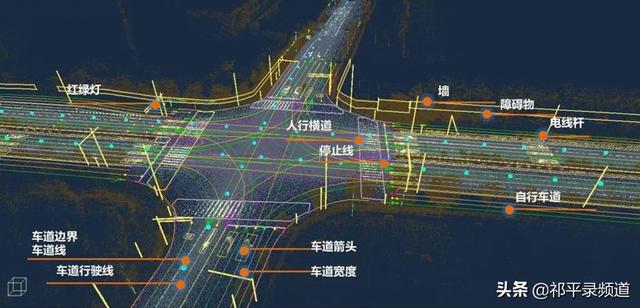
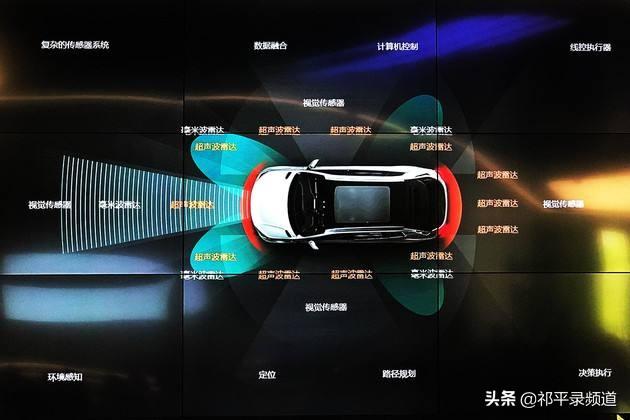
研究人员使用的生成式对抗网络称为SC-GAN (scene-compliant GAN),可根据现有场景中的限制条件创建轨迹,并获取场景(包括公路、人行道位置、车道方向、交通灯和标识)的高清地图,以及车载激光雷达、雷达和摄像头传感器的探测和追踪系统。GAN会输出附近车辆的参考框架,车辆原点位于中心,x轴和y轴分别由车辆的行驶方向和左侧定义。
对于未来轨迹由GAN预测的车辆而言,其潜在的情境信息和地图限制条件融合成一个RGB图像,可以用称为矩阵的数学对象来表示。矩阵是排列成行和列的数字矩形阵列,通常以AI模型可以操作的格式表示概念。这些图像捕捉了车辆后方10米和两侧30米范围内的场景。
在实验中,研究小组在谷歌TensorFlow机器学习框架中部署了该AI系统和一些基线,并获得了大规模的、真实世界的数据集(ATG4D),包括在各种交通状况下行驶240小时的数据。每辆车每0.1秒创建单个数据点,包括当前和过去0.4秒的所观测到的速度、加速度、行驶方向,以及780万个数据点的转向变化率,这些数据点与周围环境高清地图信息一起被分解为模型训练、测试和评估集。

研究人员称,与基线相比,SC-GAN减少了50%的冲出道路误报,这是一种度量方法,用于测量车辆可行驶区域之外的预测轨迹点的百分比。此外,SC-GAN在运动预测方面超过了现有的最先进的GAN架构,显著地减少了平均和最终预测错误。
研究人员表示,即使是在相当有挑战性的边缘情况下,SC-GAN也能成功预测车辆的运动。例如,在一个场景中,一辆汽车在直行车道上驶近十字路口,即使其轨迹稍微向左倾斜,SC-GAN也能准确地预测到它将继续直行。在另一个场景中,SC-GAN正确地预测到车辆在进入十字路口后会右转。

该项研究的合著者写道,“运动预测是自动驾驶技术的关键组成部分之一,建模了自动驾驶车辆附近被追踪的参与者的未来行为和不确定性。大量的定性和定量分析表明,在基于GAN的周围道路使用者的运动预测方面,该方法优于目前的技术水平,可以生成更准确、更真实的轨迹。”
最后
以上就是冷静大地最近收集整理的关于无人驾驶车辆模型预测控制代码_玩家讲述|优步开发AI技术 提高自动驾驶汽车运动轨迹预测准确率...的全部内容,更多相关无人驾驶车辆模型预测控制代码_玩家讲述|优步开发AI技术内容请搜索靠谱客的其他文章。








发表评论 取消回复