【现控】1 系统状态空间表达式
一、基本概念
状态:状态是变化的,是时域里的一系列变量。它可以数字、曲线或者其他什么更为抽象的东西描述。
状态变量:能够完全描述系统的最小一组变量。可抽象可具体。
状态空间:以状态变量构成的n维状态空间。
状态矢量:状态矢量是状态空间中的一点,由状态变量线性合成。
状态方程:由系统的状态变量构成的一阶微分方程组。
输出方程:在指定系统输出的情况下,该输出与状态变量间的函数关系式。
状态空间表达式:状态方程和输出方程总和起来,构成对一个系统完整的动态描述。
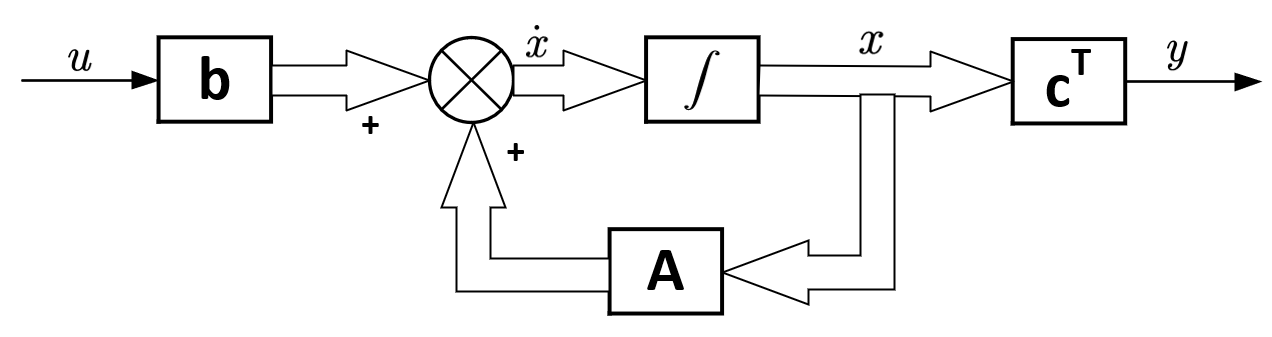
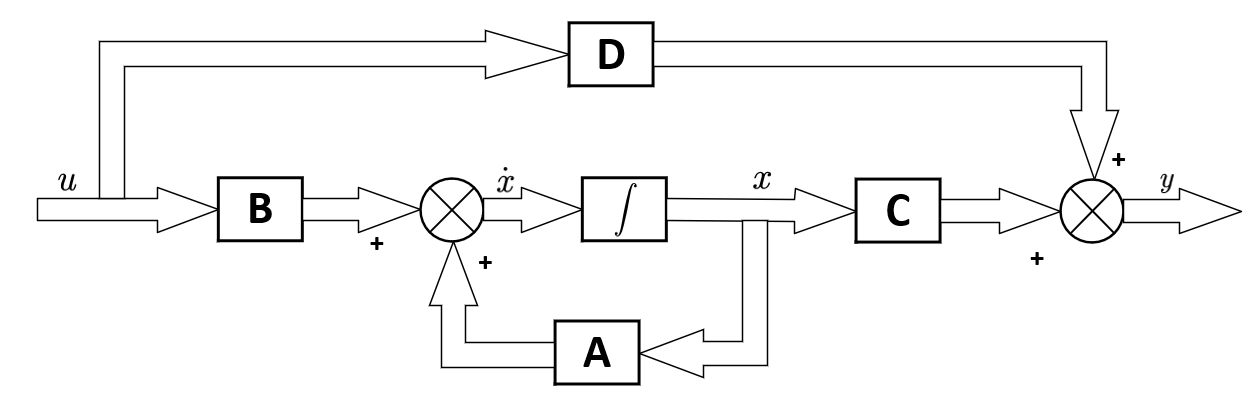
状态空间表达式的系统框图:用于表示系统信号的传递关系,单线箭头表示标量信号,双线箭头表示矢量信号。
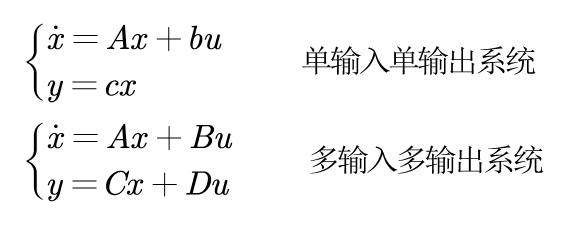
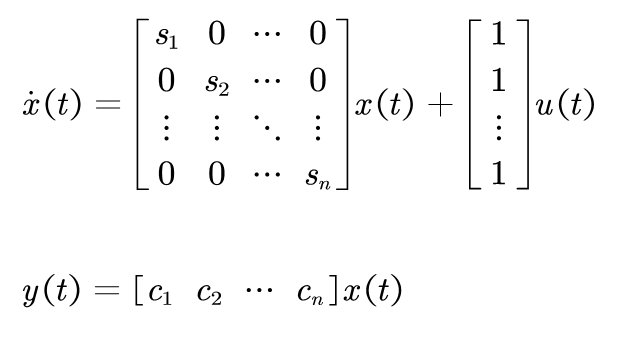
有如下所示的单输入单输出系统和多输入多输出系统的状态空间表达式:
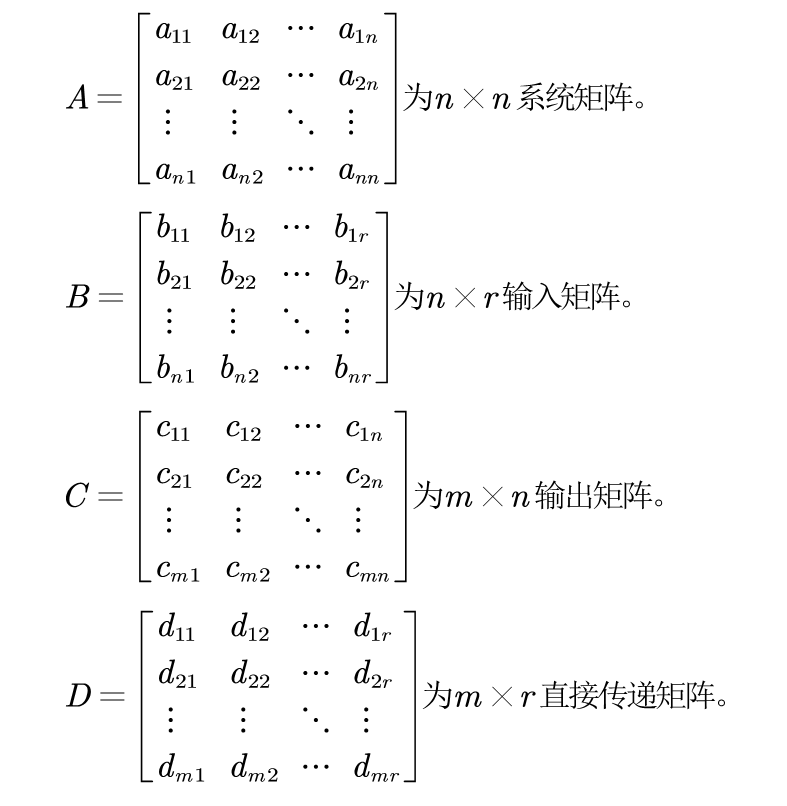
表达式中各个矩阵称为如下图所示:
单输入单输出系统和多输入多输出系统的状态框图分别如下所示:
二、状态空间表达式的建立
状态空间表达式可以通过多种途径建立,如根据系统机理建立、系统框图建立、根据输入输出表达式建立等。这里着重讲根据输入输出表达式建立状态空间表达式。
1、输入不含导数项
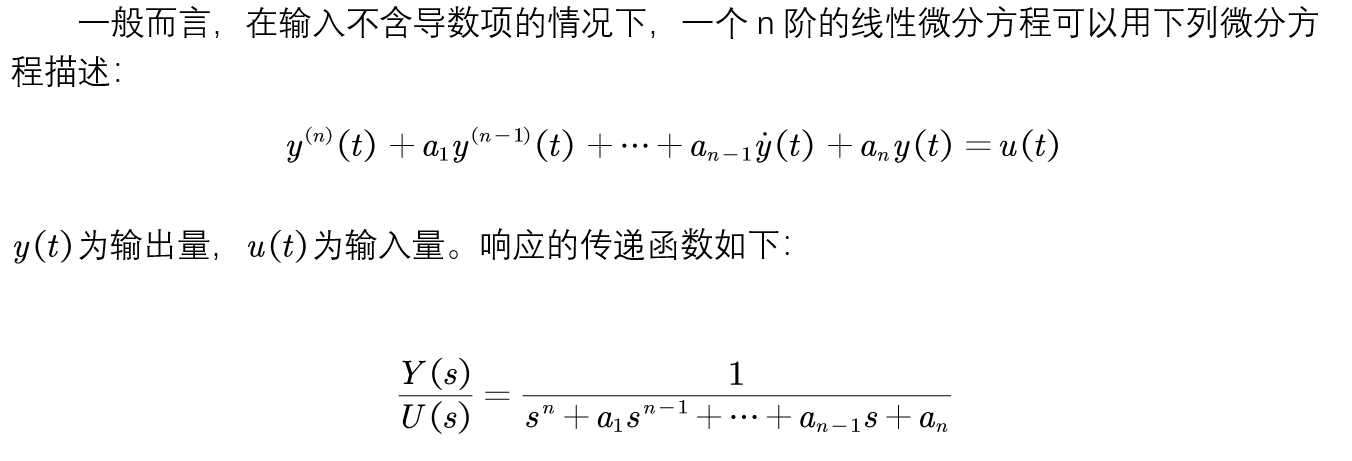
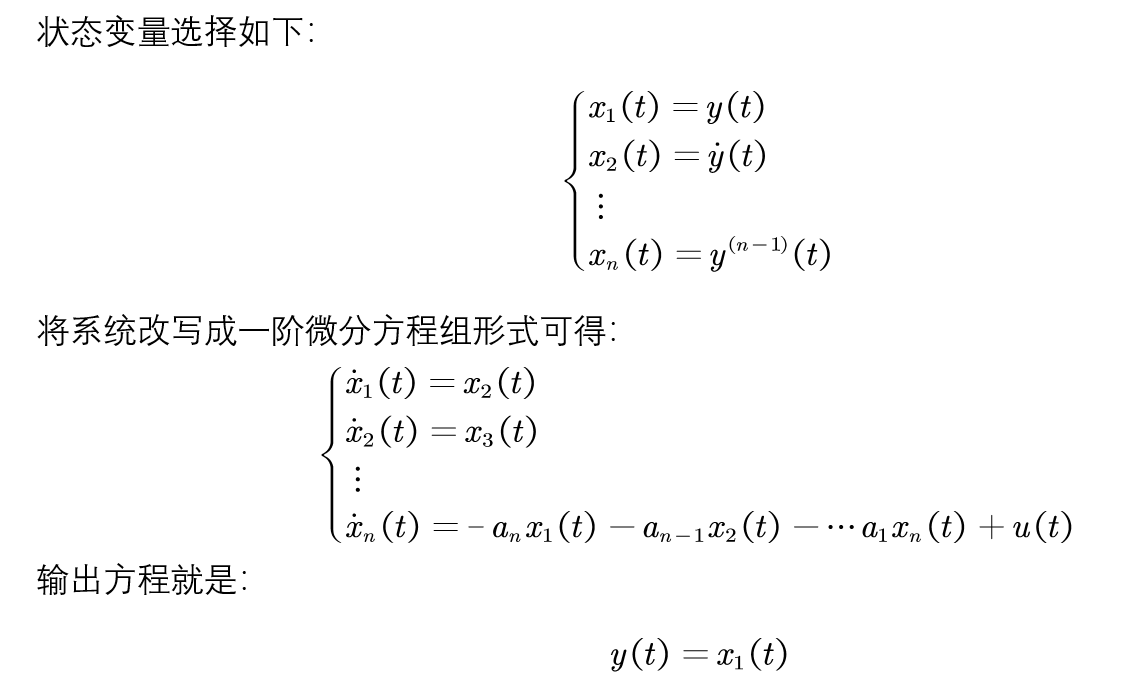
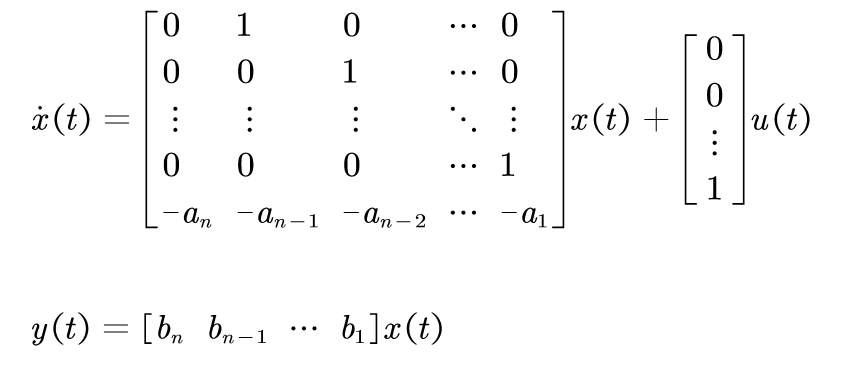
(1)能控规范形
求解系统状态空间表达式的关键就在于状态变量的选取,对于如上输入不含导数项的情况,状态变量往往选为输出变量的0~n-1阶导数,就可以获得n个一阶微分方程,从而将高阶系统转化为一阶微分方程组,最终使控制系统得到简化。
用向量-矩阵的形式表示时,状态空间方程如下:
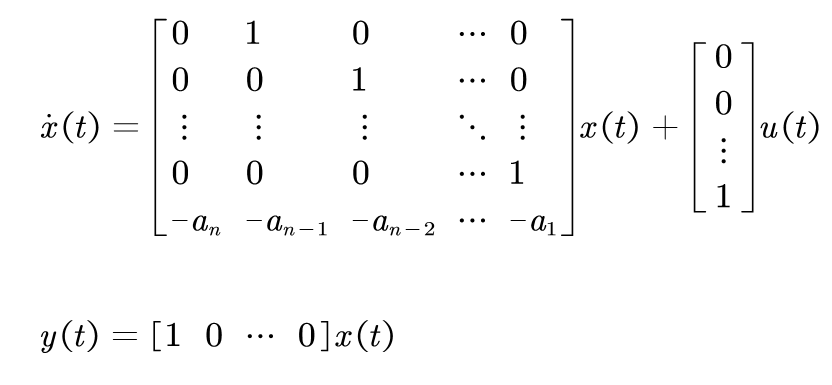
这便是能控规范形。
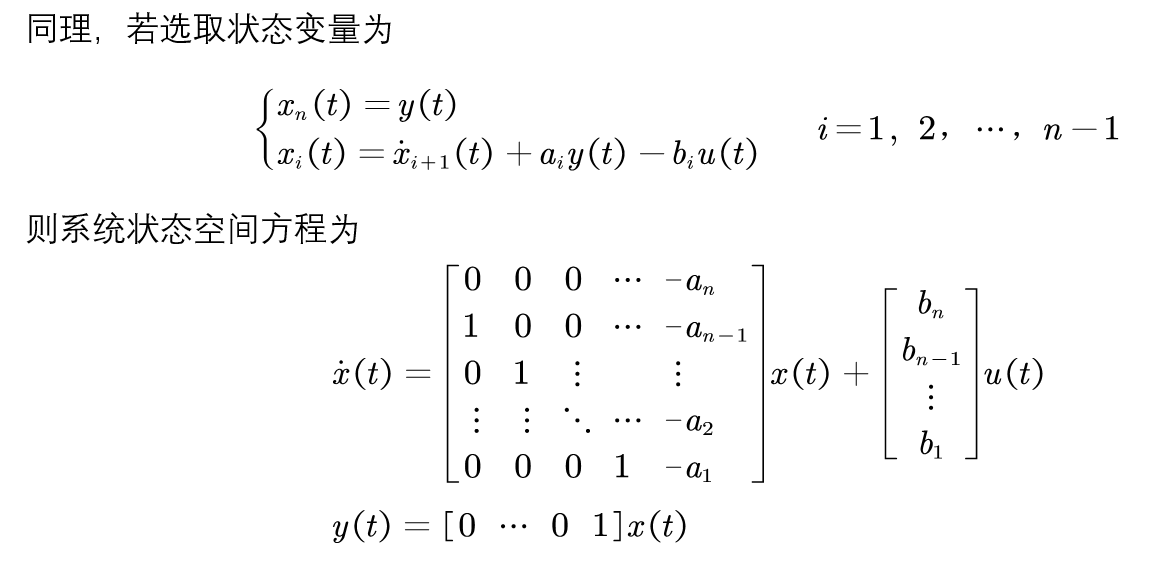
(2)能观测规范形
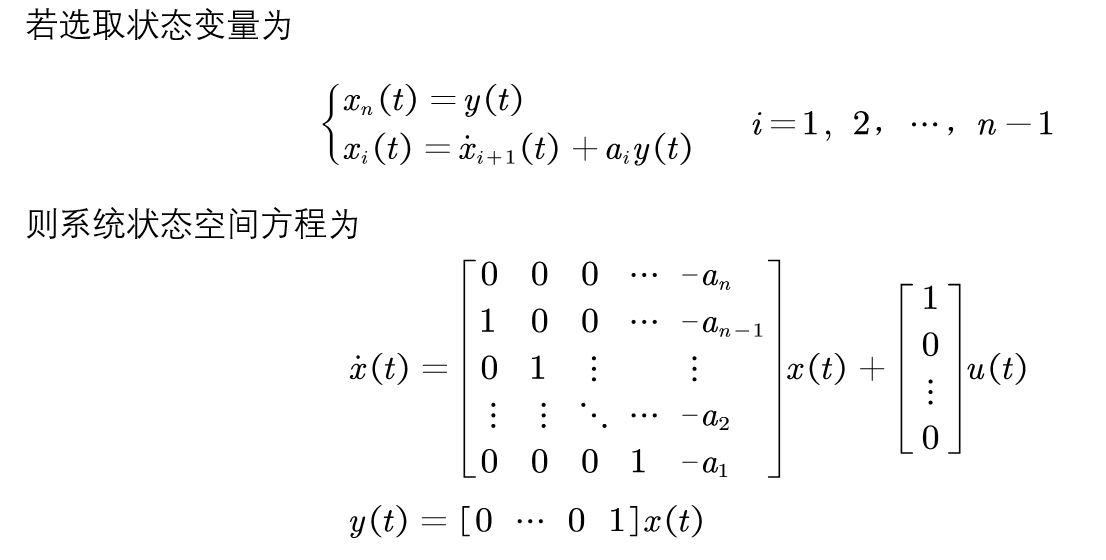
这便是能观测规范形。
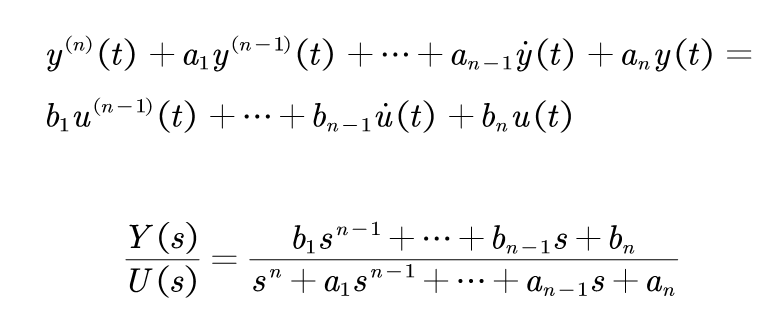
2、输入含有导数项
输入含有导数项的微分方程在不仅求解上复杂,而且在物理实现上也存在麻烦,故希望选取合适的状态变量使得状态方程中不含输入函数的导数项。输入含有导数项的微分方程与传递函数如下:
(1)能控规范形
将传递函数改写为:
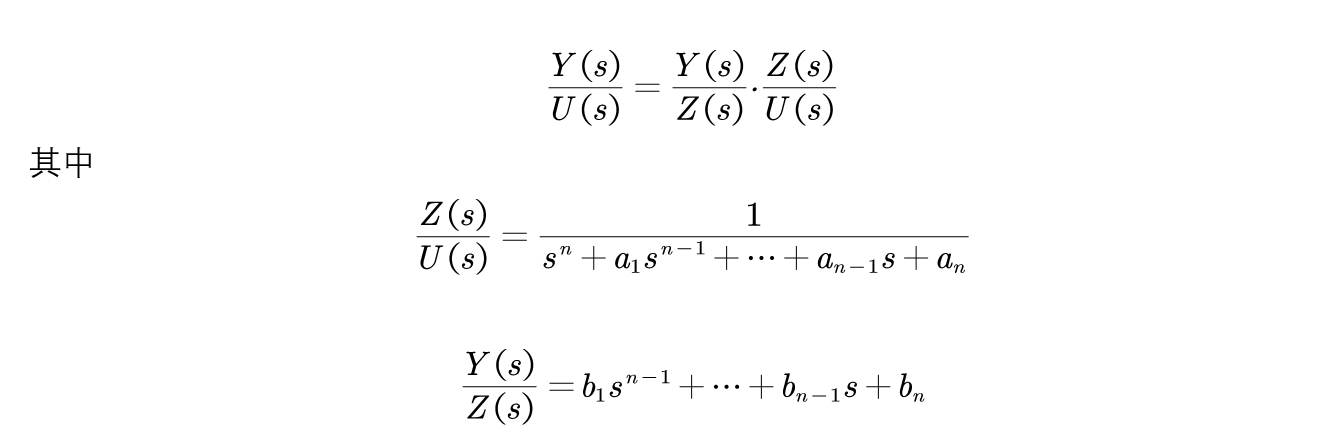
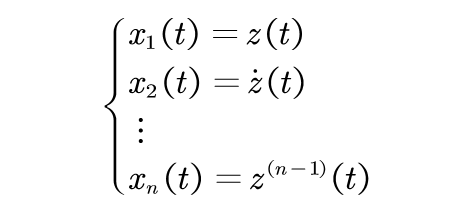
选择状态变量为中间变量z的0到n-1阶导数:
结果得到与输入没有导数项的状态方程类似,不同的是输出方程:
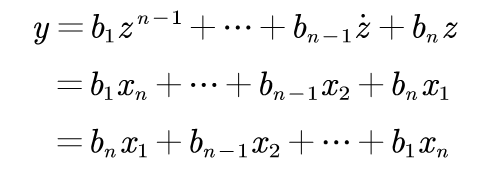
最终的到输入含有导数项的能控规范形状态空间表达式为:
(2)能观测规范形
这便是输入含有导数项的能观测规范形状态空间表达式。
3、约旦规范形
除了能控规范形和能观测规范形,也可以把系统矩阵写成约旦形,有时候会特别有用。约旦规范形又可以分为两种情况。
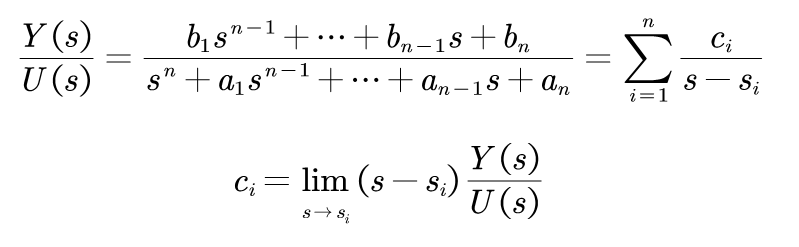
情况1:传递函数所有极点互异。
将传递函数分解为部分分式的形式:
选取状态变量:
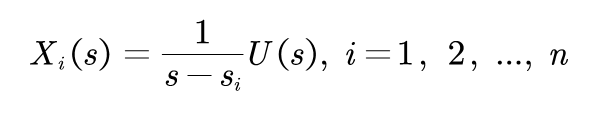
则有:
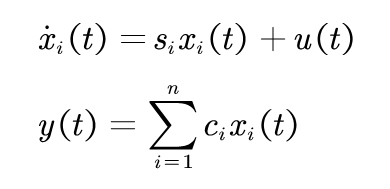
改写成矩阵形式,即可得到极点互异的约当规范形状态空间表达式:
观察表达式可以知道,系统矩阵的中的主对角元素正好是该系统的极点,而且只有主对角元素才有可能是非零的,系统矩阵则变为一个对角阵。对角阵是一种特殊的约旦阵。
情况2:传递函数所有极点非互异(有重根)。
首先依然是将传递函分解为部分分式形式,然后再用留数法确定其系数:
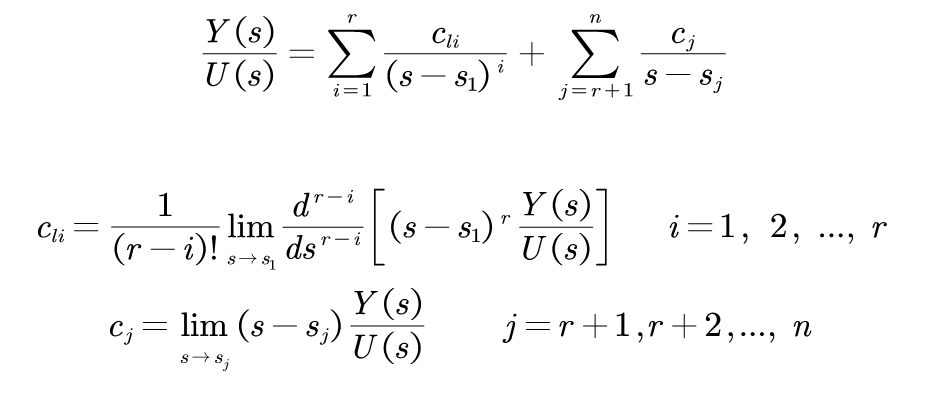
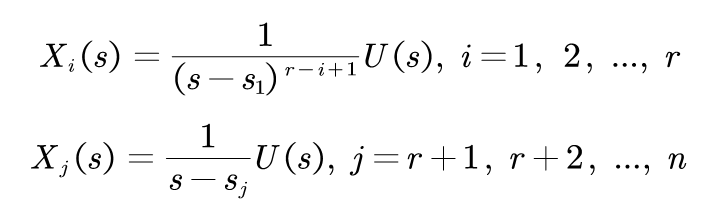
接着选择状态变量(重极点与互异极点分开选):
考虑
x
˙
k
(
t
)
dot{x}_kleft( t right)
x˙k(t)的表达式,
k
=
1
,
2
,
.
.
.
,
r
,
r
+
1
,
.
.
.
,
n
k=1,2,...,r, r+1,...,n
k=1,2,...,r,r+1,...,n
(
1
)
k
<
r
left( 1 right) k<r
(1)k<r
X k ( s ) = 1 ( s − s 1 ) r − k + 1 U ( s ) = 1 s − s 1 X k + 1 ( s ) X_kleft( s right) =frac{1}{left( s-s_1 right) ^{r-k+1}}Uleft( s right) =frac{1}{s-s_1}X_{k+1}left( s right) Xk(s)=(s−s1)r−k+11U(s)=s−s11Xk+1(s)
s X k ( s ) = s 1 X k ( s ) + X k + 1 ( s ) sX_kleft( s right) =s_1X_kleft( s right) +X_{k+1}left( s right) sXk(s)=s1Xk(s)+Xk+1(s)
x
˙
k
=
s
1
x
k
+
x
k
+
1
dot{x}_k=s_1x_k+x_{k+1}
x˙k=s1xk+xk+1
(
2
)
k
=
r
left( 2 right) k=r
(2)k=r
X
k
(
s
)
=
1
s
−
s
1
U
(
s
)
X_kleft( s right) =frac{1}{s-s_1}Uleft( s right)
Xk(s)=s−s11U(s)
x
˙
k
=
s
1
x
k
+
u
dot{x}_k=s_1x_k+u
x˙k=s1xk+u
(
3
)
k
>
r
left( 3 right) k>r
(3)k>r
X
k
(
s
)
=
1
s
−
s
k
U
(
s
)
X_kleft( s right) =frac{1}{s-s_k}Uleft( s right)
Xk(s)=s−sk1U(s)
x ˙ k = s k x k + u dot{x}_k=s_kx_k+u x˙k=skxk+u
以上三种情况的约旦规范形状态空间表达式可以归纳为:
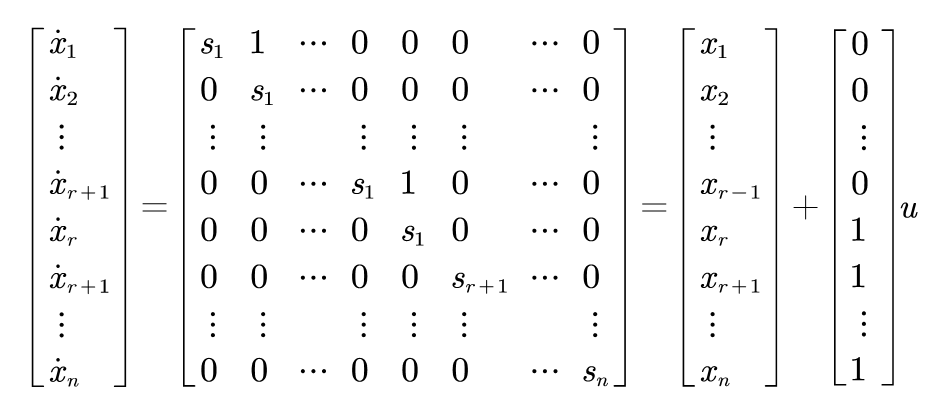

观察约旦规范形的各个系数矩阵可知:系统矩阵的主对角线由一些约旦块组成,并且其余元素都为0。当所有约旦块均为1阶时,系统矩阵为对角矩阵,也就是系统无重极点,并且主对角线的值也是系统矩阵的特征值。
最后
以上就是饱满枫叶最近收集整理的关于【现控】系统状态空间表达式的全部内容,更多相关【现控】系统状态空间表达式内容请搜索靠谱客的其他文章。
![java webrtc降噪_[转]WebRTC 音视频开发总结(十六)](https://www.shuijiaxian.com/files_image/reation/bcimg16.png)







发表评论 取消回复