1、零点
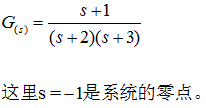
零点:使系统传递函数G(s)为0的s的值,其中s为复数。比如:
2、极点
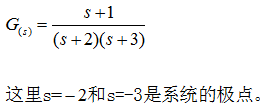
极点:使系统传递函数G(s)分母为0的s的值,其中s为复数。比如:
由于系统有开环传函和闭环传函,因此有开环零极点和闭环零极点之分。注意开环零极点和闭环零极点在系统理论分析中都有其作用。
3、系统的稳定性
稳定性判断:在零初始条件下,当且仅当 t → ∞ trightarrow infty t→∞,闭环系统的单位冲激响应为零时,系统是稳定的。
上面的判断当然是在时域里判断的。在复域里是怎样的呢。
我们想到系统的单位冲激响应的拉式变换,就是系统的传递函数。
那么在复域中稳定性判断:闭环系统的闭环传递函数的极点都在S平面的左半平面,则系统稳定。
诶,这是怎么对应起来的呢?
举个栗子,闭环系统传函为:
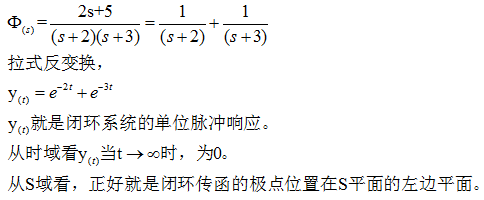
所以系统的稳定性由闭环传函极点的实部决定。 所以对于高阶系统无法求时域响应时,只要判断闭环传函的极点位置就行。
但是有一点,是要判断所有极点位置分布。对于高阶系统还有点困难的。那么我们就有了其他的稳定性判据:
- 劳斯稳定性判据;
- 赫尔维茨稳定性判据;
- 伯德图稳定性判定法(频响);
- 奈奎斯特稳定性判据(频响);
简单说下劳斯稳定性判据:
劳斯稳定性判据,只根据系统闭环传递函数的分母多项式的系数,列出劳斯陈列表然后按照劳斯祖传的方法一步步往后计算即可判断系统的稳定性。
需要说明的是,劳斯和赫尔维茨稳定性判据只能判断系统稳不稳定,却不能判断系统有多稳定或者说离不稳定有多远。
最后
以上就是缥缈玫瑰最近收集整理的关于零极点和系统稳定性关系的全部内容,更多相关零极点和系统稳定性关系内容请搜索靠谱客的其他文章。








发表评论 取消回复