关于步进电机
步进电机在非常多的场合有着广泛的用途。通常情况下对运动控制有较高精度需求时就可以使用步进电机,初学来说常用的步进电机有42、57两种系列的步进电机。42电机的体积合适做一些小型的设备,它输出的扭矩较小,比较适合做小车的底盘驱动电机,小型3D打印机驱动电机,桌面机械臂的驱动电机等等。
相对于42步进电机,还有57步进电机,它的体积和质量有了较大的提升,当然其扭矩也有很大的提高。适用于做一些有负载需求的场景,比如小型的搬运机械臂驱动、特殊的滑台场景等。
总之选用步进之前要考虑到:对控制精度的需求,精度需求不高可以使用更简单稳定的直流电机。对负载输出的需求,负载输出较大时无论直流或者步进都需要考虑加合适的减速器。使用场景对电机性能要求,如果对电机转速,负载,精度等都有很高的要求那就考虑选用高品质的(无刷电机=¥¥¥¥)。
接下来针对两个驱动器:TB6600 DRV8825简单说明一下他们的控制42(同57)步进电机的驱动代码,至于硬件接线,理论上,只要硬件设计得当,电机使用场景不复杂,那这两种驱动器都只需要两根接线:脉冲信号输入+正反转控制
DRV8825+42步进
硬件的主要参考:https://zhuanlan.zhihu.com/p/210266085 建议在使用该模块之前一定要先认真研读一下这个网址的说明。
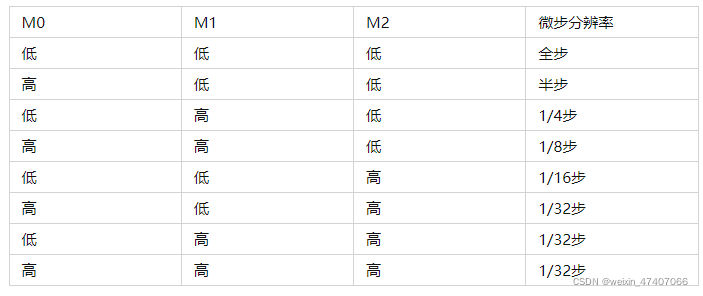
DRV8825模块的体积比较小,最大输出电流3A,最大细分32分。驱动的控制方式比较简单。核心就是3个脚:EN, STEP, DIR,其中EN负责控制驱动器的使能端口,STEP负责输入驱动脉冲信号,DIR负责控制电机的正反转。
接线图:
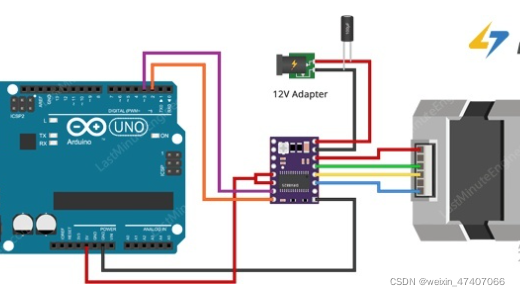
至于其它的控制细分数的引脚可以直接通过布线接需要的电平。
TB6600
硬件参考:TB6600的GPIO控制.
这个驱动器的接线核心和DRV8825其实差不多,主要也是三个信号:使能端口,脉冲信号输入,方向控制。不同的是TB6612内部需要差分信号,所以就需要有涉及共阴或者共阳的接线,一般来说我个人推荐使用共阳的接线方式,将信号阳极全部接到3.3V的电源正极,信号负极再一对一接到单片机的控制引脚。因为32的引脚驱动能力有限,在阴极输出可以保证信号的有效性。
接线图:(图中的EN没有接线,因为默认EN不接线时是有效状态,信号线接线是共阳极)
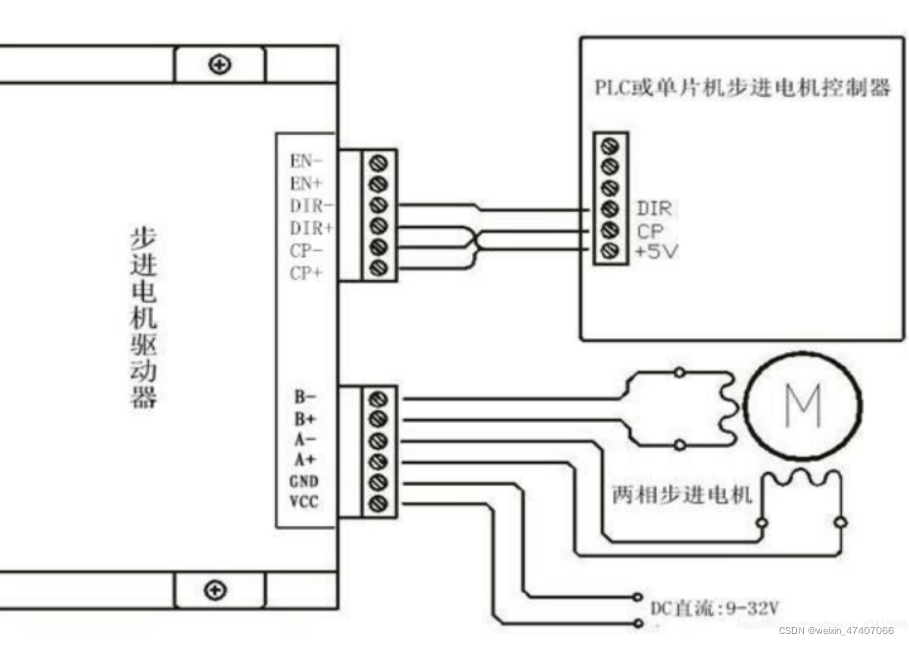
再另外的TB6600的驱动能力相对于DRV8825的驱动能力也要更强,它最大的带载能力达到了4A,24V,可以控制从小到大的接大部分42和57步进电机。限制它的应该就是驱动器的体积了。
废话不多说,直接来代码部分:
GPIO模拟
这里无论使用TB6612还是DRV8825,接线就不在赘述。
使用GPIO模拟的核心就是改变循环中间隔定时改变引脚的电平,模拟PWM的脉冲输出,这个方式是驱动代码写起来最简单的,但不是特别稳定。
代码参考文章最后的完整代码。
主从定时器模式控制
下面通过STM32F407控制器为例,使用两个定时器,TIM9+TIM10,主定时器负责定时,从定时器负责输出固定频率的脉冲。通过两个定时器的配合达到最终在固定时间段内(控制电机转速)输出一定脉冲(控制电机旋转角度)控制步进电机转动。
首先需要介绍一下头文件的宏定义,在代码中通过定义结构体的方式来定义一个电机的运动状态。并进行条件选择,在.文件中进行条件编译,达到一套代码适用多种情况的方式,更加便捷和易用。
#define TIMECount 0 //无编码器,主从定时器定时器控制模式
#define AS5600 0 //有编码器,编码器角度闭环模式
#define GPIO_Simulation 1 //无编码器,通过GPIO模拟控制电机转动
/**
* @brief 设置步进电机控制结构体
* @par Direction:设置电机旋转方向,FORWARD为正转,REVERSE为反转
* @par State:设置电机是否可以被设置,Free为使能,Busy为禁用
* @par setAngle:电机旋转角度
*/
typedef struct STEPMotor
{
char Direction;
char State;
float setAngle;
float realAngle;
}STEPMotor;
#define DRIVER_DIR PFout(3) // DVR8825设置旋转方向
#define DRIVER_EN PFout(5) // 使能脚 低电平有效
#define FORWARD 0 //步进正转
#define REVERSE 1 //步进反转
#define Free 0 //步进电机状态空闲
#define Busy 1 //步进电机状态忙,不可被设置
#define MotorCorrectionAngle 6400 //步进电机走360度需要的步数
好了我们来直接说一下具体的控制代码:
初始化电机状态结构体
/**
* @brief 初始化步进电机控制机构体的所有数据
* @param motor 步进电机控制机构体
*/
void StepMotor_InitData_STEPMotorStruct(STEPMotor *motor)
{
motor->Direction = FORWARD;
motor->realAngle = 0;
motor->setAngle = 0;
motor->State = Free;
}
定时器10输出PWM脉冲初始化函数,TIM9初始化
/**
* @brief 定时器10输出PWM脉冲初始化函数
* @param Period :定时器自动重装载值
* @param Prescaler :定时器分频系数
* Time10时钟总线为APB2,是SYSCLK的2分频,为84MHz。当Prescaler=1680,Period=50时,输出频率为
* (84M/1680)/50=1kHz
*/
void StepMotor_TIM10PWMsteep_ProduceInit(int Period, int Prescaler)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM10,ENABLE); //TIM10时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
GPIO_PinAFConfig(GPIOF,GPIO_PinSource6,GPIO_AF_TIM10);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF,&GPIO_InitStructure);
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Prescaler=50; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period=1680; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM10,&TIM_TimeBaseStructure); //x=9~14
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择PWM模式
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCNPolarity_High; //输出极性低
TIM_OC1Init(TIM10, &TIM_OCInitStructure); //初始化定时器x通道1,x=9~14
TIM_OC1PreloadConfig(TIM10, TIM_OCPreload_Enable); //使能定时器x在CCR1上的预装载寄存器,x=9~14
TIM_ARRPreloadConfig(TIM10,ENABLE);//定时器x的ARPE使能,x=9~14
TIM_Cmd(TIM10, DISABLE);
TIM_SetCompare1(TIM10,420);
}
/**
* @brief 定时器9定时初始化
* 定时频率为4kHz,用于计时使能TIM10输出脉冲
*/
void StepMotor_TIM9Timing_ProduceInit(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM9, ENABLE); ///使能TIM7时钟
TIM_TimeBaseInitStructure.TIM_Period = 0; //自动重装载值
TIM_TimeBaseInitStructure.TIM_Prescaler = 42000; //定时器分频 频率4kHz
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM9, &TIM_TimeBaseInitStructure); //初始化TIM9
TIM_ITConfig(TIM9, TIM_IT_Update, ENABLE); //允许定时器9更新中断
NVIC_InitStructure.NVIC_IRQChannel = TIM1_BRK_TIM9_IRQn; //定时器9中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x03; //抢占优先级1
//抢占优先级高的会优先抢占优先级低的,优先得到执行。(注意:优先级数字越小,优先级越高)
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x03; //子优先级1
//抢占优先级相同,不涉及到中断嵌套,响应优先级不同,响应优先级高的先响应
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/**
* @brief 定时器9的中断处理函数
*
*/
void TIM1_BRK_TIM9_IRQHandler(void)
{
if(TIM_GetITStatus(TIM9,TIM_IT_Update)==SET) //溢出中断
{
TIM_Cmd(TIM10,DISABLE);
ActionReady = 0; //定时器时长结束标志
}
TIM_ClearITPendingBit(TIM9,TIM_IT_Update); //清除中断标志位
TIM_Cmd(TIM9,DISABLE);
}
步进电机驱动器DRV8825驱动器初始化
/**
* @brief 步进电机驱动器DRV8825驱动器初始化
* //DIR 6
//STEP 5
//MS 4
//EN 3
//VCC 2
//GND 1
*/
void StepMotor_Driver_GpioInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC | RCC_AHB1Periph_GPIOG | RCC_AHB1Periph_GPIOB, ENABLE); //使能GPIOG时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3 | GPIO_Pin_4; // DRIVER_DIR DRIVER_OE对应引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; // 100M
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOG, &GPIO_InitStructure); //初始化GPIOG3,4
GPIO_ResetBits(GPIOG, GPIO_Pin_3); // PG3输出低 使能输出 DRIVER_ENA
GPIO_SetBits(GPIOG, GPIO_Pin_4); // PG4输出高 顺时针方向 DRIVER_DIR
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11 | GPIO_Pin_12; // DRIVER_OE对应引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; // 100M
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOC, &GPIO_InitStructure); //初始化GPIOG3,4
GPIO_SetBits(GPIOC, GPIO_Pin_10); //全部拉高32细分,可以不接这3个GPIO,在电路上全部给3.3V
GPIO_SetBits(GPIOC, GPIO_Pin_11);
GPIO_SetBits(GPIOC, GPIO_Pin_12);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_ResetBits(GPIOB, GPIO_Pin_2);
}
步进电机控制转动给定角度函数
/**
* @brief 步进电机控制转动给定角度函数
* @param STEPMotor 传入电机控制结构体指针
* * @par Direction:设置电机旋转方向,FORWARD为正转,REVERSE为反转
* * @par State:设置电机是否可以被设置,Free为空闲,Busy为忙不可设置,最好不要人工改变,初始化的时候赋值为0就可以
* * @par setAngle:电机旋转角度,最小值0,最大值720度
*
* 函数使用举例:
* 在主函数中使用该函数控制步进电机正向旋转90度:
int main() {
......
STEPMotor stpmotor = {0};
stpmotor.Direction = FORWARD; //正转
stpmotor.setAngle = 90; //90度
StepMotor_SetRotationAngle(&stpmotor); //旋转一次
}
*/
void StepMotor_SetRotationAngle(STEPMotor *motor)
{ if(ActionReady == 0) motor->State = Free;
if(motor->State == Free)
{
if(motor->Direction == FORWARD)
{
DRIVER_DIR = 1;
}
else DRIVER_DIR = 0;
float tim = 0;
tim = (motor->setAngle/360)*MotorCorrectionAngle;
tim = tim / 2000*4000; // 2000为PWM脉冲发出定时器TIM10的频率,4000为时长定时器TIM9频率
motor->State = Busy;
TIM_SetAutoreload(TIM9, tim);
TIM_Cmd(TIM9, ENABLE);
TIM_Cmd(TIM10, ENABLE);
ActionReady = 1;
}
}
注意在移植使用的时候要灵活选择配置引脚,32的每个外设都有多个引脚通道,能够合适的使用对应引脚会大大的降低硬件布线的复杂性,这里的代码主要是参考一个配置的思路。
编码器闭环模式
这里使用的编码器为AS5600磁霍尔式编码器,淘宝有成品可以买到,他是模拟采集数字输出的一个传感器,AD转换的精度达到了12位,在一般的场景中这个精度的编码器完全够用了。AS5600在一些店家的设计下有PWM输出和模拟电压输出以及I2C输出等等的方式,这里直接使用I2C模式,这个模式下读取到的数据直接就是编码器内部的寄存器的值,而且配置也更加简单。
在使用这个模式时,默认你应该明白了上面的使用一种驱动器让步进电机转起来,并了解I2C总线的原理。
IIC读取AS5600的角度数据
/**
* @brief IIC读取AS5600的角度数据
* @param deviceaddr 器件的从机地址,从机的7位地址是0x36 (二进制为0110110)
* @param readaddr 需要读取的数据寄存器地址,AS5600的角度为两个0x0E(8:11)和0x0F(0:7)两个寄存器前7位组成
* @return u8 返回一个寄存器中读出的1bit数据
*/
u8 AS5600_IIC_Read_OneByte(u8 deviceaddr,u8 readaddr)
{
u8 temp;
IIC_Start();
IIC_Send_Byte(deviceaddr&0xfe);
IIC_Wait_Ack();
IIC_Send_Byte(readaddr);
IIC_Wait_Ack();
IIC_Start();
IIC_Send_Byte(deviceaddr|0x01);
IIC_Wait_Ack();
temp=IIC_Read_Byte(0);
IIC_Stop();
return temp;
}
读取当前编码器的旋转角度
/**
* @brief 读取当前编码器的旋转角度
* @param motor 步进电机控制机构体
*/
void StepMotor_ReadAS5600_Date(STEPMotor *motor)
{
unsigned int value = 5000;
value = AS5600_IIC_Read_OneByte((0x36<<1),0x0e);
value <<= 8;
value |= AS5600_IIC_Read_OneByte((0x36<<1),0x0f);
if(value<=4096)
motor->realAngle = (float)(value/4096)*360;
}
步进电机角度初始化
这里相当于舵机归中,就是在上电的时候将步进轴旋转到初始位置。
/**
* @brief 步进电机角度初始化
*/
void StepMotor_Init_SetAngle(STEPMotor *motor)
{
StepMotor_ReadAS5600_Date(motor);
if(motor->realAngle > motor->setAngle)
{
DRIVER_DIR = FORWARD;
int state = 1;
TIM_Cmd(TIM10, ENABLE);
do
{
StepMotor_ReadAS5600_Date(motor);
if((motor->realAngle - motor->setAngle) <= 4) state = 0;
}while (state);
TIM_Cmd(TIM10,DISABLE);
}
else if(motor->realAngle < motor->setAngle)
{
DRIVER_DIR = REVERSE;
int state = 1;
TIM_Cmd(TIM10, ENABLE);
do
{
StepMotor_ReadAS5600_Date(motor);
if((motor->setAngle - motor->realAngle) <= 4) state = 0;
}while (state);
TIM_Cmd(TIM10,DISABLE);
}
}
步进电机闭环旋转到固定角度
/**
* @brief 步进电机闭环旋转到固定角度
* @param motor 步进电机控制机构体
* 使用函数举例:
* STEPMotor stpmotor;
* StepMotor_InitData_STEPMotorStruct(&stpmotor);
* StepMotor_Init_SetAngle(&stpmotor);
* stpmotor->setAngle = 98;
* StepMotor_SetRotationAngle(&stpmotor);
*/
void StepMotor_SetRotationAngle(STEPMotor *motor)
{
if (motor->State == Free)
{
motor->State = Busy;
if (motor->realAngle > motor->setAngle)
{
DRIVER_DIR = FORWARD;
int state = 1;
TIM_Cmd(TIM10, ENABLE);
do
{
StepMotor_ReadAS5600_Date(motor);
if ((motor->realAngle - motor->setAngle) <= 4)
state = 0;
} while (state);
TIM_Cmd(TIM10, DISABLE);
}
else if (motor->realAngle < motor->setAngle)
{
DRIVER_DIR = REVERSE;
int state = 1;
TIM_Cmd(TIM10, ENABLE);
do
{
StepMotor_ReadAS5600_Date(motor);
if ((motor->setAngle - motor->realAngle) <= 4)
state = 0;
} while (state);
TIM_Cmd(TIM10, DISABLE);
}
}
}
代码完整版
代码的配置是相对不变的,引脚的分配和控制的逻辑要灵活运用
StepperMotor.h
#ifndef __STEPPERMOTOR_H
#define __STEPPERMOTOR_H
#include "sys.h"
#define TIMECount 0 //无编码器,主从定时器定时器控制模式
#define AS5600 0 //有编码器,编码器角度闭环模式
#define GPIO_Simulation 1
/**
* @brief 设置步进电机控制结构体
* @par Direction:设置电机旋转方向,FORWARD为正转,REVERSE为反转
* @par State:设置电机是否可以被设置,Free为使能,Busy为禁用
* @par setAngle:电机旋转角度
*/
typedef struct STEPMotor
{
char Direction;
char State;
float setAngle;
float realAngle;
}STEPMotor;
#define DRIVER_DIR PFout(3) // DVR8825设置旋转方向
#define DRIVER_EN PFout(5) // 使能脚 低电平有效
#define FORWARD 0 //步进正转
#define REVERSE 1 //步进反转
#define Free 0 //步进电机状态空闲
#define Busy 1 //步进电机状态忙,不可被设置
#define MotorCorrectionAngle 6400 //步进电机走360度需要的步数
/************** 共用API **************/
void StepMotor_TIM10PWMsteep_ProduceInit(int Period, int Prescaler);
void StepMotor_InitData_STEPMotorStruct(STEPMotor *motor);
void StepMotor_Driver_GpioInit(void);
void StepMotor_SetRotationAngle(STEPMotor *motor);
/************** 定时器计数模式下私有API **************/
#if TIMECount
void StepMotor_TIM9Timing_ProduceInit(void);
void TIM1_BRK_TIM9_IRQHandler(void);
#endif
/************** 编码器闭环模式下私有API **************/
#if AS5600
u8 AS5600_IIC_Read_OneByte(u8 deviceaddr,u8 readaddr);
void StepMotor_ReadAS5600_Date(STEPMotor *motor);
void StepMotor_Init_SetAngle(STEPMotor *motor);
#endif
/************** GPIO模拟脉冲模式下私有API **************/
#if GPIO_Simulation
#define Rise 0x04
#define Decline 0x05
void StepMotor1_SetRotationRise(uint8_t DIR);
void StepMotor2_SetRotationRise(uint8_t DIR);
void StepMotor3_SetRotationRise(uint8_t DIR);
#endif
#endif
StepperMotor.c
#include "StepperMotor.h"
#include "myiic.h"
#include "delay.h"
/**
* @brief 初始化步进电机控制机构体的所有数据
* @param motor 步进电机控制机构体
*/
void StepMotor_InitData_STEPMotorStruct(STEPMotor *motor)
{
motor->Direction = FORWARD;
motor->realAngle = 0;
motor->setAngle = 0;
motor->State = Free;
}
/**
* @brief 定时器10输出PWM脉冲初始化函数
* @param Period :定时器自动重装载值
* @param Prescaler :定时器分频系数
* Time10时钟总线为APB2,是SYSCLK的2分频,为84MHz。当Prescaler=1680,Period=50时,输出频率为
* (84M/1680)/50=1kHz
*/
void StepMotor_TIM10PWMsteep_ProduceInit(int Period, int Prescaler)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM10,ENABLE); //TIM10时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
GPIO_PinAFConfig(GPIOF,GPIO_PinSource6,GPIO_AF_TIM10);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF,&GPIO_InitStructure);
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Prescaler=50; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period=1680; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM10,&TIM_TimeBaseStructure); //x=9~14
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择PWM模式
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCNPolarity_High; //输出极性低
TIM_OC1Init(TIM10, &TIM_OCInitStructure); //初始化定时器x通道1,x=9~14
TIM_OC1PreloadConfig(TIM10, TIM_OCPreload_Enable); //使能定时器x在CCR1上的预装载寄存器,x=9~14
TIM_ARRPreloadConfig(TIM10,ENABLE);//定时器x的ARPE使能,x=9~14
TIM_Cmd(TIM10, DISABLE);
TIM_SetCompare1(TIM10,420);
}
#if TIMECount
char ActionReady = 0;
/**
* @brief 步进电机驱动器DRV8825驱动器初始化
* //DIR 6
//STEP 5
//MS 4
//EN 3
//VCC 2
//GND 1
*/
void StepMotor_Driver_GpioInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC | RCC_AHB1Periph_GPIOG | RCC_AHB1Periph_GPIOB, ENABLE); //使能GPIOG时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3 | GPIO_Pin_4; // DRIVER_DIR DRIVER_OE对应引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; // 100M
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOG, &GPIO_InitStructure); //初始化GPIOG3,4
GPIO_ResetBits(GPIOG, GPIO_Pin_3); // PG3输出低 使能输出 DRIVER_ENA
GPIO_SetBits(GPIOG, GPIO_Pin_4); // PG4输出高 顺时针方向 DRIVER_DIR
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11 | GPIO_Pin_12; // DRIVER_OE对应引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; // 100M
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOC, &GPIO_InitStructure); //初始化GPIOG3,4
GPIO_SetBits(GPIOC, GPIO_Pin_10); //全部拉高32细分,可以不接这3个GPIO,在电路上全部给3.3V
GPIO_SetBits(GPIOC, GPIO_Pin_11);
GPIO_SetBits(GPIOC, GPIO_Pin_12);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_ResetBits(GPIOB, GPIO_Pin_2);
}
/**
* @brief 定时器9定时初始化
* 定时频率为4kHz,用于计时使能TIM10输出脉冲
*/
void StepMotor_TIM9Timing_ProduceInit(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM9, ENABLE); ///使能TIM7时钟
TIM_TimeBaseInitStructure.TIM_Period = 0; //自动重装载值
TIM_TimeBaseInitStructure.TIM_Prescaler = 42000; //定时器分频 频率4kHz
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM9, &TIM_TimeBaseInitStructure); //初始化TIM7
TIM_ITConfig(TIM9, TIM_IT_Update, ENABLE); //允许定时器9更新中断
NVIC_InitStructure.NVIC_IRQChannel = TIM1_BRK_TIM9_IRQn; //定时器9中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x03; //抢占优先级1
//抢占优先级高的会优先抢占优先级低的,优先得到执行。(注意:优先级数字越小,优先级越高)
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x03; //子优先级1
//抢占优先级相同,不涉及到中断嵌套,响应优先级不同,响应优先级高的先响应
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/**
* @brief 定时器9的中断处理函数
*
*/
void TIM1_BRK_TIM9_IRQHandler(void)
{
if(TIM_GetITStatus(TIM9,TIM_IT_Update)==SET) //溢出中断
{
TIM_Cmd(TIM10,DISABLE);
ActionReady = 0; //定时器时长结束标志
}
TIM_ClearITPendingBit(TIM9,TIM_IT_Update); //清除中断标志位
TIM_Cmd(TIM9,DISABLE);
}
/**
* @brief 步进电机控制转动给定角度函数
* @param STEPMotor 传入电机控制结构体指针
* * @par Direction:设置电机旋转方向,FORWARD为正转,REVERSE为反转
* * @par State:设置电机是否可以被设置,Free为空闲,Busy为忙不可设置,最好不要人工改变,初始化的时候赋值为0就可以
* * @par setAngle:电机旋转角度,最小值0,最大值720度
*
* 函数使用举例:
* 在主函数中使用该函数控制步进电机正向旋转90度:
int main() {
STEPMotor stpmotor = {0};
stpmotor.Direction = FORWARD; //正转
stpmotor.setAngle = 90; //90度
StepMotor_SetRotationAngle(&stpmotor); //旋转一次
}
*/
void StepMotor_SetRotationAngle(STEPMotor *motor)
{ if(ActionReady == 0) motor->State = Free;
if(motor->State == Free)
{
if(motor->Direction == FORWARD)
{
DRIVER_DIR = 1;
}
else DRIVER_DIR = 0;
float tim = 0;
tim = (motor->setAngle/360)*MotorCorrectionAngle;
tim = tim / 2000*4000; // 2000为PWM脉冲发出定时器TIM10的频率,4000为时长定时器TIM9频率
motor->State = Busy;
TIM_SetAutoreload(TIM9, tim);
TIM_Cmd(TIM9, ENABLE);
TIM_Cmd(TIM10, ENABLE);
ActionReady = 1;
}
}
#endif
#if AS5600
#include <math.h>
/**
* @brief 步进电机驱动器DRV8825驱动器初始化
* //DIR 6 PF3
//STEP 5
//MS 4
//EN 3 PF5
//VCC 2
//GND 1
*/
void StepMotor_Driver_GpioInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF , ENABLE); //使能GPIOG时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3 | GPIO_Pin_5; // DRIVER_DIR DRIVER_EN对应引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; // 100M
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF, &GPIO_InitStructure); //初始化GPIOG3,4
GPIO_ResetBits(GPIOF, GPIO_Pin_5); // PG3输出低 使能输出 DRIVER_ENA
GPIO_SetBits(GPIOF, GPIO_Pin_3); // PG4输出高 顺时针方向 DRIVER_DIR
}
/**
* @brief IIC读取AS5600的角度数据
* @param deviceaddr 器件的从机地址,从机的7位地址是0x36 (二进制为0110110)
* @param readaddr 需要读取的数据寄存器地址,AS5600的角度为两个0x0E(8:11)和0x0F(0:7)两个寄存器前7位组成
* @return u8 返回一个寄存器中读出的1bit数据
*/
u8 AS5600_IIC_Read_OneByte(u8 deviceaddr,u8 readaddr)
{
u8 temp;
IIC_Start();
IIC_Send_Byte(deviceaddr&0xfe);
IIC_Wait_Ack();
IIC_Send_Byte(readaddr);
IIC_Wait_Ack();
IIC_Start();
IIC_Send_Byte(deviceaddr|0x01);
IIC_Wait_Ack();
temp=IIC_Read_Byte(0);
IIC_Stop();
return temp;
}
/**
* @brief 读取当前编码器的旋转角度
* @param motor 步进电机控制机构体
*/
void StepMotor_ReadAS5600_Date(STEPMotor *motor)
{
unsigned int value = 5000;
value = AS5600_IIC_Read_OneByte((0x36<<1),0x0e);
value <<= 8;
value |= AS5600_IIC_Read_OneByte((0x36<<1),0x0f);
if(value<=4096)
motor->realAngle = (float)(value/4096)*360;
}
/**
* @brief 步进电机角度初始化
*/
void StepMotor_Init_SetAngle(STEPMotor *motor)
{
StepMotor_ReadAS5600_Date(motor);
if(motor->realAngle > motor->setAngle)
{
DRIVER_DIR = FORWARD;
int state = 1;
TIM_Cmd(TIM10, ENABLE);
do
{
StepMotor_ReadAS5600_Date(motor);
if((motor->realAngle - motor->setAngle) <= 4) state = 0;
}while (state);
TIM_Cmd(TIM10,DISABLE);
}
else if(motor->realAngle < motor->setAngle)
{
DRIVER_DIR = REVERSE;
int state = 1;
TIM_Cmd(TIM10, ENABLE);
do
{
StepMotor_ReadAS5600_Date(motor);
if((motor->setAngle - motor->realAngle) <= 4) state = 0;
}while (state);
TIM_Cmd(TIM10,DISABLE);
}
}
/**
* @brief 步进电机闭环旋转到固定角度
* @param motor 步进电机控制机构体
* 使用函数举例:
* STEPMotor stpmotor;
* StepMotor_InitData_STEPMotorStruct(&stpmotor);
* StepMotor_Init_SetAngle(&stpmotor);
* stpmotor->setAngle = 98;
* StepMotor_SetRotationAngle(&stpmotor);
*/
void StepMotor_SetRotationAngle(STEPMotor *motor)
{
if (motor->State == Free)
{
motor->State = Busy;
if (motor->realAngle > motor->setAngle)
{
DRIVER_DIR = FORWARD;
int state = 1;
TIM_Cmd(TIM10, ENABLE);
do
{
StepMotor_ReadAS5600_Date(motor);
if ((motor->realAngle - motor->setAngle) <= 4)
state = 0;
} while (state);
TIM_Cmd(TIM10, DISABLE);
}
else if (motor->realAngle < motor->setAngle)
{
DRIVER_DIR = REVERSE;
int state = 1;
TIM_Cmd(TIM10, ENABLE);
do
{
StepMotor_ReadAS5600_Date(motor);
if ((motor->setAngle - motor->realAngle) <= 4)
state = 0;
} while (state);
TIM_Cmd(TIM10, DISABLE);
}
}
}
#endif
#if GPIO_Simulation
void StepMotor_Driver_GpioInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF | RCC_AHB1Periph_GPIOC | RCC_AHB1Periph_GPIOE | RCC_AHB1Periph_GPIOG, ENABLE); //使能GPIOG时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_3 | GPIO_Pin_1; // DRIVER_DIR DRIVER_EN对应引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 100M
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF, &GPIO_InitStructure); //初始化GPIOG3,4
GPIO_ResetBits(GPIOF, GPIO_Pin_5 | GPIO_Pin_3 | GPIO_Pin_1); // PG3输出低 使能输出 DRIVER_ENA
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_ResetBits(GPIOC, GPIO_Pin_13);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_6;
GPIO_Init(GPIOE, &GPIO_InitStructure);
GPIO_ResetBits(GPIOE, GPIO_Pin_4 | GPIO_Pin_6);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_2;
GPIO_Init(GPIOE, &GPIO_InitStructure);
GPIO_ResetBits(GPIOE, GPIO_Pin_0 | GPIO_Pin_2);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_Init(GPIOG, &GPIO_InitStructure);
GPIO_ResetBits(GPIOG, GPIO_Pin_13);
}
/**
* @brief 通过GPIO模拟PWM信号,驱动步进电机旋转
*
* @param DIR 正反转信号
* PF3 PF1 PF5
*/
void StepMotor1_SetRotationRise(uint8_t DIR)
{
if(DIR == Rise)
{
GPIO_SetBits(GPIOF, GPIO_Pin_3);
}
GPIO_SetBits(GPIOF, GPIO_Pin_1);
int rise = 5000;
int i = 0;
while (i<rise)
{
GPIO_SetBits(GPIOF, GPIO_Pin_5);
delay_us(500);
GPIO_ResetBits(GPIOF, GPIO_Pin_5);
delay_us(500);
i++;
}
GPIO_ResetBits(GPIOF, GPIO_Pin_5 | GPIO_Pin_3 | GPIO_Pin_1);
}
/**
* @brief PE6 PE4 PC13
*
* @param DIR
*/
void StepMotor2_SetRotationRise(uint8_t DIR)
{
if(DIR == Rise)
{
GPIO_SetBits(GPIOE, GPIO_Pin_6);
}
GPIO_SetBits(GPIOE, GPIO_Pin_4);
int rise = 5000;
int i = 0;
while (i<rise)
{
GPIO_SetBits(GPIOC, GPIO_Pin_13);
delay_us(500);
GPIO_SetBits(GPIOC, GPIO_Pin_13);
delay_us(500);
i++;
}
GPIO_ResetBits(GPIOE, GPIO_Pin_4 | GPIO_Pin_6);
GPIO_ResetBits(GPIOC, GPIO_Pin_13);
}
/**
* @brief PG13 PE0 PE2
*
* @param DIR
*/
void StepMotor3_SetRotationRise(uint8_t DIR)
{
if(DIR == Rise)
{
GPIO_SetBits(GPIOG, GPIO_Pin_13);
}
GPIO_SetBits(GPIOE, GPIO_Pin_0);
int rise = 5000;
int i = 0;
while (i<rise)
{
GPIO_SetBits(GPIOE, GPIO_Pin_2);
delay_us(500);
GPIO_SetBits(GPIOE, GPIO_Pin_2);
delay_us(500);
i++;
}
GPIO_ResetBits(GPIOE, GPIO_Pin_0 | GPIO_Pin_2);
GPIO_ResetBits(GPIOG, GPIO_Pin_13);
}
#endif // DEBUG
最后
以上就是犹豫发箍最近收集整理的关于STM32控制步进电机运三种方式控制源码详解:主从定时器+编码器闭环+GPIO模拟(基于【TB6600】【DRV8825】驱动器)关于步进电机的全部内容,更多相关STM32控制步进电机运三种方式控制源码详解内容请搜索靠谱客的其他文章。








发表评论 取消回复