A*算法原理及例题介绍
- 一、A*算法的基本原理
- 二、A*算法例题介绍
- 三、例题理论分析
- 四、程序流程图
- 五、启发式函数h(n)的定义
- 六、A*搜索过程中的节点信息
- 七、A*算法与A算法、宽度优先的区别
一、A*算法的基本原理
(A-Star)算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是许多其他问题的常用启发式算法。注意——是最有效的直接搜索算法。
公式表示为: f(n)=g(n)+h(n),其中,
f(n) 是从初始状态经由状态n到目标状态的代价估计,
g(n) 是在状态空间中从初始状态到状态n的实际代价,
h(n) 是从状态n到目标状态的最佳路径的估计代价。
(对于路径搜索问题,状态就是图中的节点,代价就是距离)
h(n)的选取:
保证找到最短路径(最优解的)条件,关键在于估价函数f(n)的选取(或者说h(n)的选取)距离估计与实际值越接近,估价函数取得就越好。
我们以d(n)表达状态n到目标状态的距离,那么h(n)的选取大致有如下三种情况:
1、如果h(n)< d(n)到目标状态的实际距离,这种情况下,搜索的点数多,搜索范围大,效率低。但能得到最优解。
2、如果h(n)=d(n),即距离估计h(n)等于最短距离,那么搜索将严格沿着最短路径进行, 此时的搜索效率是最高的。
3、如果 h(n)>d(n),搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
二、A*算法例题介绍
如下图所示,搜索起点为A,目标点为B的最优路径。注意图中实心方格区域为墙,不可穿越。移动方向仅允许垂直和水平方向移动,每移动一步代价均相同,可设置为1。
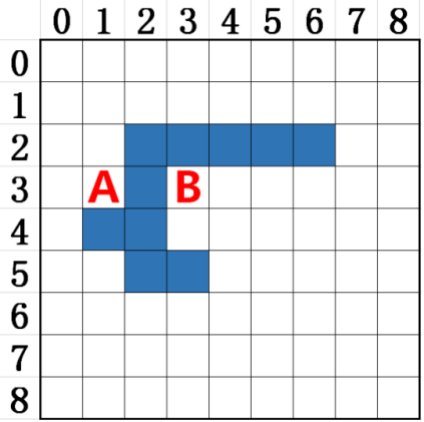
给出搜索过程中每一步中的节点信息(可选择部分中间关键步骤结果进行展示即可)主要包括起点(A)、终点(B)、open表(绿色节点)、closed表(红色节点)、每个节点的计算值(f(n)/g(n)/h(n))。
三、例题理论分析
该题具体实现可以分为如下步骤:1、设置搜索区域;2、设置open list、close list;3、开始搜索;4、路径排序;5、根据f(n)=g(n)+h(n)继续搜索;6、根据搜索结果确定路径。
1、设置搜索区域:将9*9的表格设置为搜索区域,且将表格中的墙壁设置为不可搜索区域。
2、设置open list、close list:将A及其周围区域放入open list,将每次搜索后的f(n)最小的区域放入close list。
3、开始搜索:从起点A开始进行搜索,根据f(n)=g(n)+h(n)来确定相邻区域的f(n)。
4、路径排序:在步骤二将该点相邻可搜索区域内的点进行搜索完成之后,根据f(n)的大小,对这些区域进行排序。
5、继续搜索:在排好序的区域中选择f(n)最小的区域,继续根据f(n)=g(n)+h(n)来对相邻区域进行搜索。并更新open list 和 close list。
6、若相邻区域已经在open list中(即已经被进行搜索过了),则从本区域判断其区域f(n)是否可以更新变得更小。
7、不断重复搜索过程,直到将终点B也放入close list中。
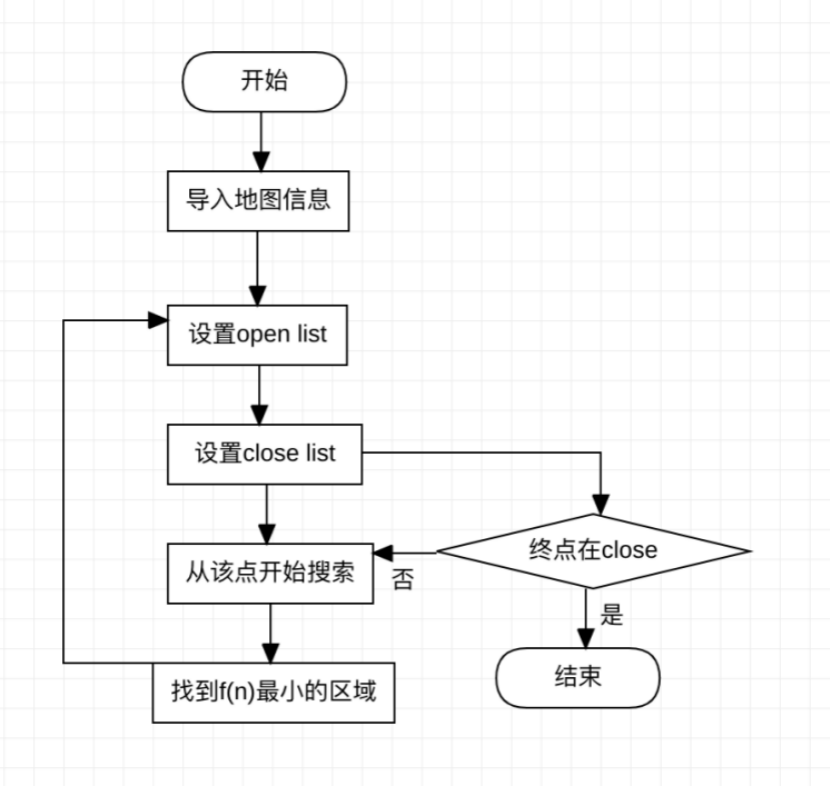
四、程序流程图
五、启发式函数h(n)的定义
static double hManhattanDistance(Point pnt)
{
return Math.abs(pnt.x - END_PNT.x) + Math.abs(pnt.y - END_PNT.y);
}
在实现中,h(n)采用曼哈顿距离,即区域i: (x1,y1)的与区域j: (x2,y2)的距离为:
d(i,j)=|X1-X2|+|Y1-Y2|
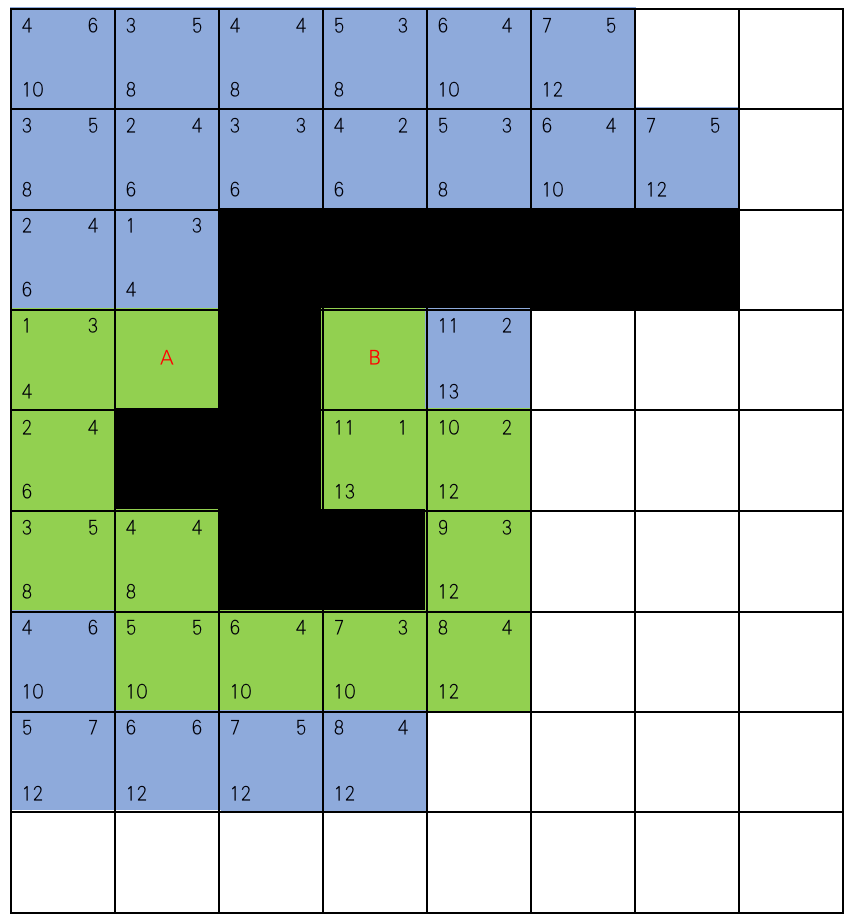
六、A*搜索过程中的节点信息
七、A*算法与A算法、宽度优先的区别
1、A*算法解决方案:见上文。
2、宽度优先搜索算法解决方案:
- 首先将起点放入顺序表中;
- 从顺序表中读取第一个区域;
- 对所读取的区域进行相邻区域搜索;
- 判断相邻区域是否为终点,是终点则停止;
- 不是终点,则将这些相邻区域放入顺序表;
- 重复2-5,直到找到终点为止。
最后
以上就是干净烧鹅最近收集整理的关于A*算法分析及例题介绍一、A*算法的基本原理二、A*算法例题介绍三、例题理论分析四、程序流程图五、启发式函数h(n)的定义六、A*搜索过程中的节点信息七、A*算法与A算法、宽度优先的区别的全部内容,更多相关A*算法分析及例题介绍一、A*算法内容请搜索靠谱客的其他文章。








发表评论 取消回复