我是靠谱客的博主 粗犷紫菜,这篇文章主要介绍树莓派学习笔记——wiringPi I2C设备使用详解1.前言2.若干简述3.简单测试代码4.代码详解5.总结与提高6.参考资料和精彩博文,现在分享给大家,希望可以做个参考。
1.前言
最近认真学习了树莓派,从浅到深认真分析了wiringPi实现代码,借助树莓派学习linux收获颇丰。深入学习linux一段时间后发现它非常有魅力,一个简单的IO口输出操作尽有那么多的“玩法”。wiringPi是一个简单易用的函数库,通过wiringPi可以扩展SPI和I2C等芯片,关于wiringPi的介绍和安装请参考我的另一篇【
博文】。
本篇博文将通过一个简单的例子呈现wiringPi的使用,虽然例子简单但会深入分析wiringPi内部实现代码。
2.若干简述
2.1 MCP23107简述
a) 硬件基本信息
MCP23017的采用7位I2C地址,7位I2C地址中的低3位从高到低分别为A2 A1和A0,该3位为地址选择位,若地址选择全部接GND,那么MCP23017的I2C从机地址为
0x20。下图为MCP23017的硬件基本信息,左侧为MCP23017引脚图,右侧为I2C从机地址组成示意图,
从机地址的高4位为0100,高4位数字固定不变。
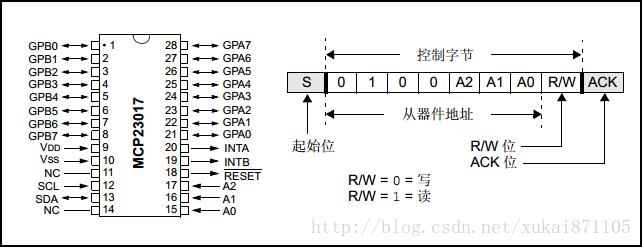
图1 MCP23017硬件基本信息
MCP23017具有GPA和GPB共16个扩展端口,另外INTA和INTB为IO中断管脚,可反映GPA或GPB的电平变化情况。请注意,RESET为复位管脚低电平有效,
可直接上拉到VDD或接一个1K到10K的电阻上拉至VDD。(经过两天的调试,我发现MCP23017运行几秒便不能运行,后来发现RESET管脚悬空,之后RESET和VDD相连问题解决。)
b) 字节模式
MCP23X17 系列能够工作于
字节模式或顺序模式(
IOCON.SEQOP)。
字节模式禁止地址指针自动递增。工作于字节模式时,MCP23X17系列在数据传送期间,传送每个字节后不会递增其内部地址计数器。
顺序模式可使地址指针自动递增。工作于顺序模式时,MCP23X17系列在数据传送期间,传送每个字节后会递增其地址计数器。访问最后一个寄存器后,地址指针自动返回到地址00h。(SEQOP位默认值为0)
c) 寄存器映射关系
BANK位用于更改寄存器的映射方式
如果BANK = 1,与每个端口关联的寄存器将相互独立。与PORTA关联的寄存器从地址00h - 0Ah 映射,与PORTB关联的寄存器从10h - 1Ah映射;如果BANK = 0,A/B寄存器将配对组合。例如,IODIRA将映射到地址00h,而IODIRB将映射到 下一地址 (地址01h)。所有寄存器的映射是从00H到15H。(BANK默认值为0)
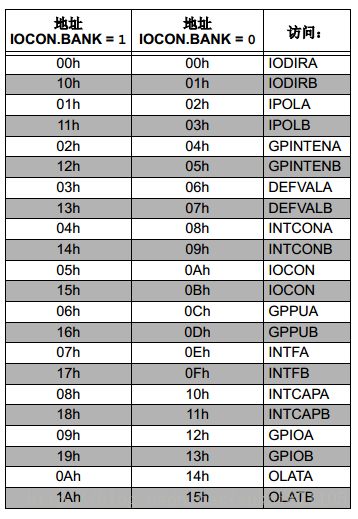
图2 寄存器地址映射关系
【其他重要寄存器】
【IODIR I/O方向寄存器。
写1为输入状态,写0为输出状态。请注意在大多数MCU中,写1为输出状态,而MCP23017这样类似的设置完全是microchip的特色。
【GPPU】GPPU上拉电阻寄存器
写1为使能上拉,写入0为禁止上拉。使能芯片内部的上拉电阻往往有很有用。
【GPIO】通用I/O端口寄存器
写1可以使相应的端口输出高电平,写0可以使响应的端口输出低电平。读取该寄存器可以获得相应端口的输入值。
2.2 用户空间开发I2C设备
通常情况下I2C设备由内核控制。但是在用户空间也可以通过 /dev设备接口访问I2C设备。每一个在内核注册的I2C设备都具有一个编号,该编号从0开始计数,可以查看 /sys/class/i2c-dev/查看具体编号,也可以通过i2ctool工具中的i2cdetect查看。【
i2cdetect工具的安装和使用】【
I2C操作时序介绍】
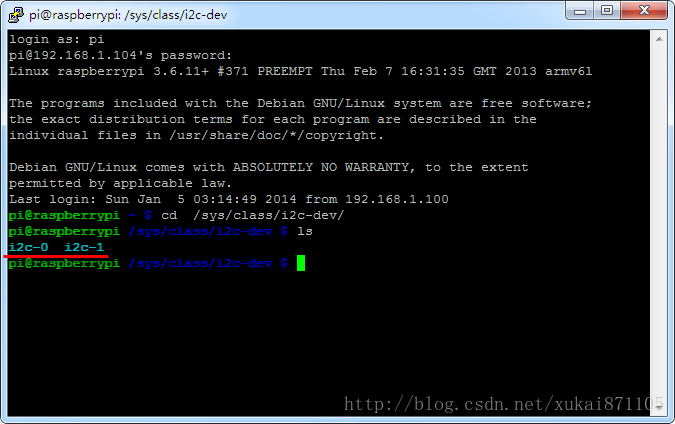
图3 查看 sys/class/i2c-dev
在linux系统中所有的设备都可以采用文件的形式访问,树莓派的i2c设备位于/dev/i2c-x(对应树莓派版本2为/dev/i2c-1),可通过open,close,wirte,read和ioclt控制i2c设备。例如open为打开I2C设备,close为关闭I2C设备,wirte为向I2C设备写入字节内容,read为从I2C设备获得字节内容,ioctl可控制I2C设备的运行参数,例如从机地址或I2C速度等参数。更多内容请参考【
linux内核 I2C驱动说明】。
默认情况下,I2C和SPI设备被拉入了“黑名单”,换句话说在树莓派初始化时SPI和I2C设备并没有载入内核。在使用I2C设备之前需要载入SPI和I2C设备,具体参开请参考博文【树莓派I2C和SPI设备配置】
3.简单测试代码
#include <stdio.h>
#include <wiringPi.h>
#include <mcp23017.h>
// 扩展MCP23017 起始PIN地址
// MCP23017占用 100-115
#define EXTEND_BASE 100
int main (void)
{
// wiringPi初始化
wiringPiSetup( );
// mcp23017初始化,此时MCP23017的I2C地址为0x20
mcp23017Setup( EXTEND_BAS E, 0x20 );
int i;
for ( i = 0 ; i < 16 ; i++ )
{
pinMode( EXTEND_BASE + i, OUTPUT );
}
for (;;)
{
for( i = 0 ; i < 16; i++)
{
digitalWrite ( EXTEND_BASE + i, HIGH);
delay (500);
digitalWrite ( EXTEND_BASE + i, LOW);
delay (500);
}
}
return 0 ;
}
4.代码详解
4.1 wiringPiSetup
【
见另一篇博文】
4.2 mcp23017Setup
int mcp23017Setup (const int pinBase, const int i2cAddress)
{
int fd ;
struct wiringPiNodeStruct *node ;
// 初始化I2C设备
if ((fd = wiringPiI2CSetup (i2cAddress)) < 0)
return fd ;
// 附加操作,设置MCP23017设备 I2C操作地址不自动递增
wiringPiI2CWriteReg8 (fd, MCP23x17_IOCON, IOCON_INIT) ;
// MCP23017加入链表
node = wiringPiNewNode (pinBase, 16) ;
// 赋值相应的操作函数 my开头的函数均位于mcp23017.c文件中
node->fd = fd ;
node->pinMode = myPinMode ;
node->pullUpDnControl = myPullUpDnControl ;
node->digitalRead = myDigitalRead ;
node->digitalWrite = myDigitalWrite ;
node->data2 = wiringPiI2CReadReg8 (fd, MCP23x17_OLATA) ;
node->data3 = wiringPiI2CReadReg8 (fd, MCP23x17_OLATB) ;
return 0 ;
}
mcp23017Setup是一个较为复杂的函数,主要实现三部分功能——
第一,初始化树莓派I2C设备,通过打开
/dev/i2c-1实现(相对于树莓派2版本),通过open可返回一个
文件fd
(可理解为设备的标记或编号,就是一个数字,好比你的身份证号);
第二,加入新节点,wiringPi通过一个链表维护所有的pin,在树莓派中pin是一个比较有趣的概念,例如一个MCP23017具有16个输入或输出PIN,这使得wiringPi增加额外的16个PIN,该16个PIN起始地址可以设定,但必须大于64,16个PIN的地址连续;
第三,增加控制函数,例如digitalRead,digitalWrite和pullUpDnControl等。
4.2.1 I2C初始化 wiringPiI2CSetup
初始化的最终目标为
fd = open (device, O_RDWR)和
ioctl (fd, I2C_SLAVE, devId)
【调用关系】 【wiringPiI2CSetup】 --> 【wiringPiI2CSetupInterface】
【wiringPiI2CSetupInterface】 --> 【
fd = open (device, O_RDWR)】
--> 【
ioctl (fd, I2C_SLAVE, devId) 】
4.2.2 加入新节点 wiringPiNewNode
wiringPi的外部设备有一个链表构成,相应的数字量读写和模拟量读写均根据该链表完成。该链表是wiringPi的"核心",链表结构体见以下代码。在该
结构体中记录了节点编号(设备的起始编号 pinBase),以及各种操作函数【操作函数的说明请看4.2.3】。
struct wiringPiNodeStruct
{
int pinBase ;
int pinMax ;
int fd ; // Node specific
unsigned int data0 ; // ditto
unsigned int data1 ; // ditto
unsigned int data2 ; // ditto
unsigned int data3 ; // ditto
void (*pinMode) (struct wiringPiNodeStruct *node, int pin, int mode) ;
void (*pullUpDnControl) (struct wiringPiNodeStruct *node, int pin, int mode) ;
int (*digitalRead) (struct wiringPiNodeStruct *node, int pin) ;
void (*digitalWrite) (struct wiringPiNodeStruct *node, int pin, int value) ;
void (*pwmWrite) (struct wiringPiNodeStruct *node, int pin, int value) ;
int (*analogRead) (struct wiringPiNodeStruct *node, int pin) ;
void (*analogWrite) (struct wiringPiNodeStruct *node, int pin, int value) ;
struct wiringPiNodeStruct *next ;
} ;
wiringPiNewNode相关操作可分为3步
【1】查找MCP23017的pin是否被占用。
【2】在内存中开辟一个wiringPiNewNode。
【3】给该结构体变量设置默认值,并添加到控制链表中。
4.2.3 编写控制函数
【pinMode】IO口功能设置函数,mode参数——
INPUT为输入状态,
OUTPUT为输出状态
【pullUpDnControl】IO口输入功能设置,mode参数
【digitalRead】读取IO口管脚电平状态
【digitalWrite】设置IO口电平状态
【analogRead】
若该IO为模拟量输入端口,读取该端口的模拟输入
【analogWrite】
若该IO为模拟量输出端口,设置该端口的模拟输出
4.3 pinMode
MCP23017的扩展pin必须大于64,在MCP23017Setup函数中注册了相应的pin,此处通过wiringPiFindNode在链表中查找MCP23017的node信息,
node信息包括pin编号、设置IO方向、读取和设置IO管脚等。请注意 node->pinMode (node, pin, mode) 指向 MCP23017中的myPinMode函数,该注册工作在mcp23017Setup发生。
// 位于wiringPi.c
void pinMode (int pin, int mode)
{
int fSel, shift, alt ;
struct wiringPiNodeStruct *node = wiringPiNodes ;
// PIN编号小于64,内部设备
if ((pin & PI_GPIO_MASK) == 0)
{
// 代码省略
}
else
{
// 查找是否存在该设备
if ((node = wiringPiFindNode (pin)) != NULL)
node->pinMode (node, pin, mode) ;
return ;
}
}
// 位于mcp23017.c
static void myPinMode (struct wiringPiNodeStruct *node, int pin, int mode)
{
int mask, old, reg ;
pin -= node->pinBase ;
// 操作GPA 或 GPB
if (pin < 8)
reg = MCP23x17_IODIRA ;
else
{
reg = MCP23x17_IODIRB ;
pin &= 0x07 ;
}
// 获得IODIRx原始值
mask = 1 << pin ;
old = wiringPiI2CReadReg8 (node->fd, reg) ;
// 设置新值
if (mode == OUTPUT)
old &= (~mask) ;
else
old |= mask ;
wiringPiI2CWriteReg8 (node->fd, reg, old) ;
}4.4 digitalWrite
digitalWrite函数和pinMode函数操作思路相同,先检测该pin位于板载区域还是扩展区域,如果是扩展区域该pin是否有效,如果有效则调用digitalRead函数。
// 位于wiringPi.c
int digitalWrite (int pin)
{
char c ;
struct wiringPiNodeStruct *node = wiringPiNodes ;
// PIN编号小于64,内部设备
if ((pin & PI_GPIO_MASK) == 0)
{
// 代码省略
}
else
{
// 查找是否存在该设备
if ((node = wiringPiFindNode (pin)) == NULL)
return LOW ;
return node->digitalWrite (node, pin) ;
}
}
// 位于mcp23017.c
static void myDigitalWrite (struct wiringPiNodeStruct *node, int pin, int value)
{
int bit, old ;
pin -= node->pinBase ;
bit = 1 << (pin & 7) ;
// 操作GPA
if (pin < 8)
{
old = node->data2 ;
if (value == LOW)
old &= (~bit) ;
else
old |= bit ;
wiringPiI2CWriteReg8 (node->fd, MCP23x17_GPIOA, old) ;
node->data2 = old ;
}
// 操作GPB
else
{
old = node->data3 ;
if (value == LOW)
old &= (~bit) ;
else
old |= bit ;
wiringPiI2CWriteReg8 (node->fd, MCP23x17_GPIOB, old) ;
node->data3 = old ;
}
}
4.6 wiringPiI2CReadReg8 和 wiringPiI2CWriteReg8
这两个函数涉及到linux驱动方面的内容,均通过ioctl (fd, I2C_SMBUS, &args)实现,具体请看以下代码,更多底层的内容请参考【
linux内核 I2C驱动说明】
struct i2c_smbus_ioctl_data
{
char read_write ;
uint8_t command ;
int size ;
union i2c_smbus_data *data ;
} ;
static inline int i2c_smbus_access (int fd, char rw, uint8_t command, int size, union i2c_smbus_data *data)
{
struct i2c_smbus_ioctl_data args ;
args.read_write = rw ;
args.command = command ;
args.size = size ;
args.data = data ;
return ioctl (fd, I2C_SMBUS, &args) ;
}
int wiringPiI2CReadReg8 (int fd, int reg)
{
union i2c_smbus_data data;
if (i2c_smbus_access (fd, I2C_SMBUS_READ, reg, I2C_SMBUS_BYTE_DATA, &data))
return -1 ;
else
return data.byte & 0xFF ;
}
int wiringPiI2CWriteReg8 (int fd, int reg, int value)
{
union i2c_smbus_data data ;
data.byte = value ;
return i2c_smbus_access (fd, I2C_SMBUS_WRITE, reg, I2C_SMBUS_BYTE_DATA, &data) ;
}
5.总结与提高
wiringPi提供了一个很好的封装,但是也是一把双刃剑。对于初学而言可以很好的利用树莓派实现应用,绕开linux驱动方面的知识,但是慢慢熟悉之后还是要补充linux驱动方面的内容个,使用open、wirte和ioctl实现I2C设备的控制。
国外有很多博文指出,BCM2835的I2C存在问题,该问题发生在I2C Stop时序保持的时间太短导致I2C从设备无法正常体质。参考资料中的第1项包含对I2C硬件问题的讨论和解决方法,请各位参考。
6.参考资料和精彩博文
1.【
修改I2C设备默认速度】【
修改I2C设备默认速度】
2.【
MCP23017 C++ Example 国外】
最后
以上就是粗犷紫菜最近收集整理的关于树莓派学习笔记——wiringPi I2C设备使用详解1.前言2.若干简述3.简单测试代码4.代码详解5.总结与提高6.参考资料和精彩博文的全部内容,更多相关树莓派学习笔记——wiringPi内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复