我是靠谱客的博主 迷路柜子,这篇文章主要介绍Franka matlab、Ubuntu18.04/Matlab R2022b 示例运行1. 所需软件2. 版本关系3. Franka matlab4. 初始化5. Matlab Library测试,现在分享给大家,希望可以做个参考。
目录
1. 所需软件
2. 版本关系
3. Franka matlab
4. 初始化
5. Matlab Library测试
因公司需要接通Franka机械臂与matlab,在网上查找后发现资料较少,此处记录根据官方FCI资料做的一些工作
FCI 中文版(更新较慢):
franka_matlab包 — Franka Control Interface (FCI) 文档
FCI 官方版(推荐使用):
https://frankaemika.github.io/docs/franka_matlab/index.html
确保已更换实时内核,未更新参考:
Franka Emika Panda ROS-Melodic Linux 实时内核5.4.19 快速安装_chenguangbiao的博客-CSDN博客
1. 所需软件
2. 版本关系
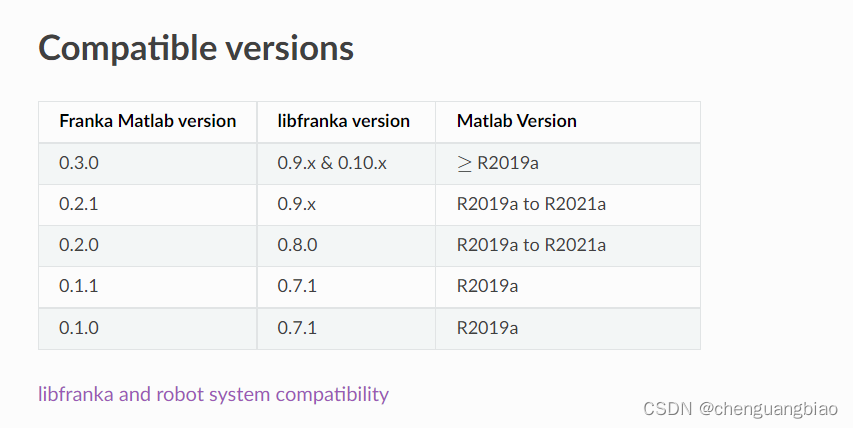
因公司无版权,本人使用试用版
实测 matlab-R2022b/Ubuntu18.04/libfranka 0.9/franka_matlab 0.3.0 可行
3. Franka matlab
需要在 FRANKA WORLD 注册账号并下载
此处提供本人下载好的文件:
franka-matlab-v0.3.0.tar-机器学习文档类资源-CSDN文库
4. 初始化
#依赖安装
sudo apt install build-essential cmake git libpoco-dev libeigen3-dev
#规定路径
>> addpath(<franka_matlab full path>);
#初始化
>> init_franka_matlab();
#libfranka 0.9.x版本需运行此条,对 Matlab API 进行一次扫描
>> mex_franka_matlab_library();
5. Matlab Library测试
因本人对matlab使用不多,了解不够,仅测试了Matlab Library
进入franka网页端控制界面,开启fci控制
Matlab Library:
#清除错误
>> franka_automatic_error_recovery(<robot ip string>);
#通讯测试(运行成功,机械臂会移动到指定姿势)
>> franka_communication_test(<robot ip string>);
#指定两点运动(未测试)
>> franka_joint_point_to_point_motion(<robot ip string>,<7 element double array with target configuration>, <0 to 1 scalar speed factor>);
#获取关节信息(返回表格)
>> franka_joint_poses(<robot ip string>);
#获取机械臂信息(返回矩阵表格)
>> franka_robot_state(<robot ip string>);最后
以上就是迷路柜子最近收集整理的关于Franka matlab、Ubuntu18.04/Matlab R2022b 示例运行1. 所需软件2. 版本关系3. Franka matlab4. 初始化5. Matlab Library测试的全部内容,更多相关Franka内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复