nano pi M4 安装ROS
- 引用各位大佬的方法
- 第一步——配置Ubuntu软件库
- 第二步——安装
- 第三步——初始化rosdep
- 第四步——环境设置
- 第五步——安装依赖
- 第六步——检验
- 第七步——运行DEMO
引用各位大佬的方法
链接1:官方教程
链接2:古月居教程(解决大部分问题)
链接3:解决网络超时问题
链接4:解决最后安装不全的问题
第一步——配置Ubuntu软件库
这一步如果遇到问题,看链接2
选这个ExBot Robotics Lab (China)
sudo sh -c '. /etc/lsb-release && echo "deb http://ros.exbot.net/rospackage/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'`
设置密钥
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
更新
sudo apt-get update
第二步——安装
桌面完整安装:(推荐)
sudo apt-get -y purge hostapd
sudo apt-get install ros-melodic-desktop-full
安装过程好像不会有什么幺蛾子
第三步——初始化rosdep
在使用ROS之前,需要初始化rosdep。
rosdep能够轻松地安装要编译的源代码的系统依赖关系,并且需要在ROS中运行一些核心组件。
sudo rosdep init
rosdep update
在执行sudo rosdep init时可能会出错,还看链接2
在执行rosdep update时,会有超时的问题,原因是要访问github,解决方法看链接三的”2021最新解决方法“。这里有的细节,比如需要修改的地方不一致,但是大致位置是没有问题的,找一下对应位置就好。
第四步——环境设置
如果ROS环境变量在每次启动新shell时自动添加到bash会话中,则很方便:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
如果安装了多个ROS分发版,~/.bashrc只能为当前使用的版本提供setup.bash。
如果只是想改变当前shell的环境,可以输入:
source /opt/ros/melodic/setup.bash
第五步——安装依赖
到目前为止,已经安装了运行核心ROS软件包所需的内容。要创建和管理ROS工作区,有各种工具和需求分开分发。
例如,rosinstall是一个经常使用的命令行工具,它使您能够使用一个命令轻松下载ROS软件包的许多源代码树。
要安装此工具和其他依赖关系来构建ROS软件包,请运行:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
第六步——检验
执行
source /opt/ros/melodic/setup.bash
roscore
正常如下
 如果出现:没有命令roscore
如果出现:没有命令roscore
那么就看链接4
“如果有roscore这个文件还是不能启动内核的话,试一试在melodic中找到一个叫setup.sh的文件,然后在终端中输入 source+它的路径,然后应该就可以roscore了”
如果没有。再执行安装命令sudo apt-get install ros-melodic-desktop-full
出现这个问题应该是之前遇到下图的问题,在执行sudo apt install python-rosdep2时删掉了好多东西。并且选择执行sudo apt install python3-rosdep2
会有很多问题。

第七步——运行DEMO
执行
source /opt/ros/melodic/setup.bash
roscore
先打开1个终端,输入以下命令:
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311
rosrun turtlesim turtlesim_node
再打开另一个终端,输入以下命令:
source /opt/ros/melodic/setup.bash
rosrun turtlesim turtle_teleop_key
你会在第2个终端上看到 Use arrow keys to move the turtle字样,将输入光标保持在第2个终端,按下键盘上的上下左右方向键,即可控制动物的行走轨迹,如下图所示:
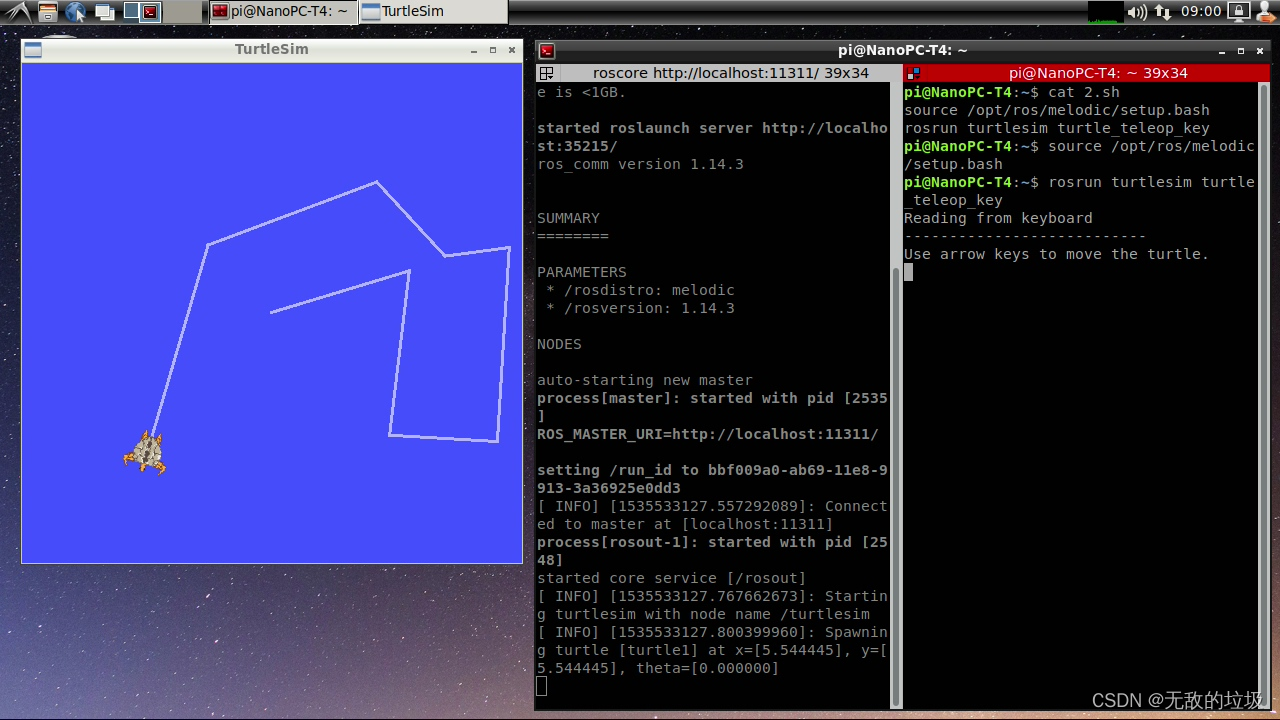
ok,装好啦
最后
以上就是自由溪流最近收集整理的关于nano pi M4 安装ROS引用各位大佬的方法的全部内容,更多相关nano内容请搜索靠谱客的其他文章。








发表评论 取消回复