作者 | 落羽归尘 编辑 | 半杯茶的小酒杯
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【轨迹预测】技术交流群
后台回复【轨迹预测综述】获取行人、车辆轨迹预测等相关最新论文!
本文主要分析Apollo中是如何对障碍物预测轨迹(Predition模块得到的未来5s内障碍物运动轨迹)、无人车参考线(ReferenceLine Provider类提供)以及当前路况(停车标志、人行横道、减速带等)信息进行融合。
1、障碍物信息的获取(Lagged Prediction)
Frame类中首先获取Prediction模块发布的障碍物预测轨迹数据,并进行相关后处理工作。
Prediction模块发布的数据格式如下:
/// file in apollo/modules/prediction/proto/prediction_obstacle.proto
message Trajectory {
optional double probability = 1; // probability of this trajectory,障碍物该轨迹运动方案的概率
repeated apollo.common.TrajectoryPoint trajectory_point = 2;
}
message PredictionObstacle {
optional apollo.perception.PerceptionObstacle perception_obstacle = 1;
optional double timestamp = 2; // GPS time in seconds
// the length of the time for this prediction (e.g. 10s)
optional double predicted_period = 3;
// can have multiple trajectories per obstacle
repeated Trajectory trajectory = 4;
}
message PredictionObstacles {
// timestamp is included in header
optional apollo.common.Header header = 1;
// make prediction for multiple obstacles
repeated PredictionObstacle prediction_obstacle = 2;
// perception error code
optional apollo.common.ErrorCode perception_error_code = 3;
// start timestamp
optional double start_timestamp = 4;
// end timestamp
optional double end_timestamp = 5;
}prediction_obstacles.prediction_obstacle()中存储了所有障碍物的轨迹信息;
prediction_obstacle.trajectory()中存储了每个障碍物prediction_obstacle所有可能的运动轨迹。
/// file in apollo/modules/planning/planning.cc
void Planning::RunOnce() {
const uint32_t frame_num = AdapterManager::GetPlanning()->GetSeqNum() + 1;
status = InitFrame(frame_num, stitching_trajectory.back(), start_timestamp, vehicle_state);
}
/// file in apollo/modules/planning/common/frame.cc
Status Frame::Init() {
// prediction
if (FLAGS_enable_prediction && AdapterManager::GetPrediction() && !AdapterManager::GetPrediction()->Empty()) {
if (FLAGS_enable_lag_prediction && lag_predictor_) { // 滞后预测策略,获取障碍物轨迹信息
lag_predictor_->GetLaggedPrediction(&prediction_);
} else { // 不采用滞后预测策略,直接取最近一次Prediction模块发布的障碍物信息
prediction_.CopyFrom(AdapterManager::GetPrediction()->GetLatestObserved());
}
}
...
}滞后预测策略获取障碍物轨迹信息的主要步骤如下:
处理最近一次发布的障碍物数据;
/// file in apollo/modules/planning/common/lag_prediction.cc
void LagPrediction::GetLaggedPrediction(PredictionObstacles* obstacles) const {
// Step A. 最近一次发布的障碍物轨迹预测信息处理
const auto adc_position = AdapterManager::GetLocalization()->GetLatestObserved().pose().position();
const auto latest_prediction = (*prediction.begin()); // 记录最近一次Prediction模块发布的信息
const double timestamp = latest_prediction->header().timestamp_sec(); // 最近一次发布的时间戳
std::unordered_set<int> protected_obstacles;
for (const auto& obstacle : latest_prediction->prediction_obstacle()) { // 获取最近一次发布的数据中,每个障碍物的运动轨迹信息
const auto& perception = obstacle.perception_obstacle();
double distance = common::util::DistanceXY(perception.position(), adc_position);
if (perception.confidence() < FLAGS_perception_confidence_threshold && // 障碍物置信度必须大于0.5,获取必须是车辆VEHICLE类,否则不作处理
perception.type() != PerceptionObstacle::VEHICLE) {
continue;
}
if (distance < FLAGS_lag_prediction_protection_distance) { // 障碍物与车辆之间的距离小于30m,才设置有效
protected_obstacles.insert(obstacle.perception_obstacle().id());
// add protected obstacle
AddObstacleToPrediction(0.0, obstacle, obstacles);
}
}
...
}滞后预测对于最近一次发布的数据处理比较简单,障碍物信息有效只需要满足两个条件:
a. 障碍物置信度(Perception模块CNN分割获得)必须大于0.5,或者障碍物是车辆类
b. 障碍物与车辆之间的距离小于30m
Prediction发布的历史信息后处理
/// file in apollo/modules/planning/common/lag_prediction.cc
void LagPrediction::GetLaggedPrediction(PredictionObstacles* obstacles) const {
// Step A 最近一次发布的障碍物轨迹预测信息处理
...
// Step B 过往发布的历史障碍物轨迹预测信息处理
std::unordered_map<int, LagInfo> obstacle_lag_info;
int index = 0; // data in begin() is the most recent data
for (auto it = prediction.begin(); it != prediction.end(); ++it, ++index) { // 对于每一次发布的信息进行处理
for (const auto& obstacle : (*it)->prediction_obstacle()) { // 获取该次发布的历史数据中,每个障碍物的运动轨迹信息
const auto& perception = obstacle.perception_obstacle();
auto id = perception.id();
if (perception.confidence() < FLAGS_perception_confidence_threshold && // 障碍物置信度必须大于0.5,获取必须是车辆VEHICLE类,否则不作处理
perception.type() != PerceptionObstacle::VEHICLE) {
continue;
}
if (protected_obstacles.count(id) > 0) { // 如果障碍物在最近一次发布的信息中出现了,那就忽略,因为只考虑最新的障碍物信息
continue; // don't need to count the already added protected obstacle
}
auto& info = obstacle_lag_info[id];
++info.count; // 记录障碍物在所有历史信息中出现的次数
if ((*it)->header().timestamp_sec() > info.last_observed_time) { // 保存最近一次出现的信息,因为只考虑最新的障碍物信息
info.last_observed_time = (*it)->header().timestamp_sec();
info.last_observed_seq = index;
info.obstacle_ptr = &obstacle;
}
}
}
bool apply_lag = std::distance(prediction.begin(), prediction.end()) >= static_cast<int32_t>(min_appear_num_);
for (const auto& iter : obstacle_lag_info) {
if (apply_lag && iter.second.count < min_appear_num_) { // 历史信息中如果障碍物出现次数小于min_appear_num_/3次,次数太少,可忽略。
continue;
}
if (apply_lag && iter.second.last_observed_seq > max_disappear_num_) { // 历史信息中如果障碍物最近一次发布距离现在过远,可忽略。
continue;
}
AddObstacleToPrediction(timestamp - iter.second.last_observed_time,
*(iter.second.obstacle_ptr), obstacles);
}
}对于历史发布数据,通过以下两个步骤判断这些障碍物轨迹信息是否有效:
步骤1:记录历史发布数据中每个障碍物出现的次数(不包含最新加入的障碍物),必须满足两个条件:
障碍物置信度(Perception模块CNN分割获得)必须大于0.5,或者障碍物是车辆类;
障碍物与车辆之间的距离小于30m;
步骤2:对于步骤1中得到的障碍物信息,进行如下筛选:
信息队列中历史数据大于3(min_ appear_num_),并且每个障碍物出现次数大于3(min_appear_num_)
信息队列中历史数据大于3(min_ appear_num_),并且障碍物信息上一次发布距离最近一次发布不大于5(max_disappear_num_),需要保证数据的最近有效性。
2. 障碍物轨迹与参考线融合
从Lagged Prediction中可以得到障碍物短期(未来5s)内的运动轨迹;从ReferenceLineProvider类中我们可以得到车辆的理想规划轨迹。我们需要将障碍物的轨迹信息加入到这条规划好的参考线ReferenceLine中,确定在什么时间点,无人车能前进到什么位置,从而保证在这个时间点上,障碍物与无人车不相撞。
/// file in apollo/modules/planning/common/frame.cc
Status Frame::Init() {
// Step A prediction,障碍物预测轨迹信息获取,采用滞后预测策略
...
// Step B.1 检查当前时刻(relative_time=0.0s),无人车位置和障碍物位置是否重叠(相撞),如果是,可以直接退出
const auto *collision_obstacle = FindCollisionObstacle();
if (collision_obstacle) {
AERROR << "Found collision with obstacle: " << collision_obstacle->Id();
return Status(ErrorCode::PLANNING_ERROR, "Collision found with " + collision_obstacle->Id());
}
// Step B.2 如果当前时刻不冲突,检查未来时刻无人车可以在参考线上前进的位置,ReferenceLineInfo生成
if (!CreateReferenceLineInfo()) { //
AERROR << "Failed to init reference line info";
return Status(ErrorCode::PLANNING_ERROR, "failed to init reference line info");
}
return Status::OK();
}2.1 实例化ReferenceLineInfo类
ReferenceLineInfo类的初始化主要包含以下两个工作:
根据无人车规划路径ReferenceLine实例化ReferenceLineInfo类,数量与ReferenceLine一致;
根据障碍物轨迹初始化Reference LineInfo::path_decision_;
/// file in apollo/modules/planning/common/frame.cc
bool Frame::CreateReferenceLineInfo() {
// Step A 从ReferenceLineProvider中获取无人车的短期内规划路径ReferenceLine,并进行收缩操作
std::list<ReferenceLine> reference_lines;
std::list<hdmap::RouteSegments> segments;
if (!reference_line_provider_->GetReferenceLines(&reference_lines, &segments)) {
return false;
}
// 对于每条ReferenceLine实例化生成一个对应的ReferenceLineInfo
reference_line_info_.clear();
auto ref_line_iter = reference_lines.begin();
auto segments_iter = segments.begin();
while (ref_line_iter != reference_lines.end()) {
if (segments_iter->StopForDestination()) {
is_near_destination_ = true;
}
reference_line_info_.emplace_back(vehicle_state_, planning_start_point_,
*ref_line_iter, *segments_iter);
++ref_line_iter;
++segments_iter;
}
}
/// file in apollo/modules/planning/common/reference_line_info.cc
ReferenceLineInfo::ReferenceLineInfo(const common::VehicleState& vehicle_state,
const TrajectoryPoint& adc_planning_point,
const ReferenceLine& reference_line,
const hdmap::RouteSegments& segments)
: vehicle_state_(vehicle_state),
adc_planning_point_(adc_planning_point),
reference_line_(reference_line),
lanes_(segments) {}这个过程就是从ReferenceLineProvider中提取无人车短期内的规划路径(如果不了解,可以查看运动规划中的参考线生成和平滑算法),然后由ReferenceLine&&segments、车辆状态和规划起始点生成对应的ReferenceLineInfo。
2.2 初始化ReferenceLineInfo类
/// file in apollo/modules/planning/common/frame.cc
bool Frame::CreateReferenceLineInfo() {
// Step A 从ReferenceLineProvider中获取无人车的短期内规划路径ReferenceLine,并进行收缩操作
...
// Step B RerfenceLineInfo初始化
bool has_valid_reference_line = false;
for (auto &ref_info : reference_line_info_) {
if (!ref_info.Init(obstacles())) {
continue;
} else {
has_valid_reference_line = true;
}
}
return has_valid_reference_line;
}ReferenceLineInfo::Init函数的主要工作如下:
检查无人车是否在参考线上
需要满足无人车对应的边界框start_s和end_s在参考线[0, total_length]区间内;
检查无人车是否离参考线过远
需要满足无人车start_l和end_l在[-kOutOfReferenceLineL, kOutOfReferenceLineL]区间内,其中kOutOfReferenceLineL=10;
将障碍物信息加入到ReferenceLineInfo类中
除了将障碍物信息加入到类中,还有一个重要的工作就是确定某个时间点无人车能前进到的位置,如下图所示。
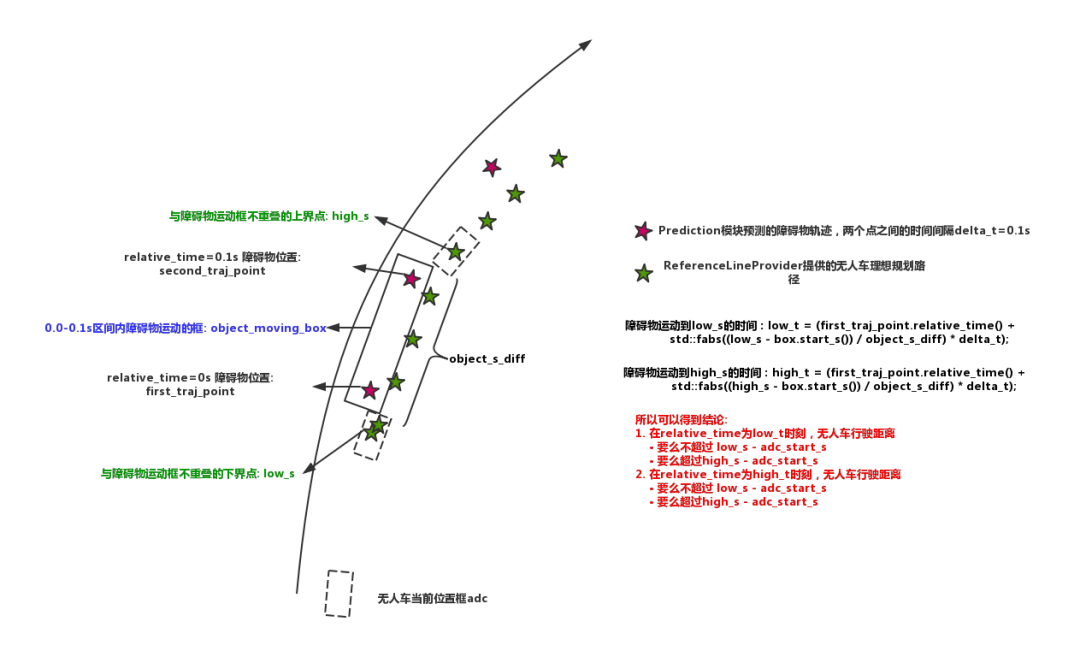
这个过程其实就是根据障碍物的轨迹(某个相对时间点,障碍物运动到哪个坐标位置),并结合无人车查询得到的理想路径,得到某个时间点low_t和high_t无人车行驶距离的下界low_s-adc_start_s和上界high_s-adc_start_s。
/// file in apollo/modules/planning/common/reference_line_info.cc
// AddObstacle is thread safe
PathObstacle* ReferenceLineInfo::AddObstacle(const Obstacle* obstacle) {
// 封装成PathObstacle并加入PathDecision
auto* path_obstacle = path_decision_.AddPathObstacle(PathObstacle(obstacle));
...
// 计算障碍物框的start_s, end_s, start_l和end_l
SLBoundary perception_sl;
if (!reference_line_.GetSLBoundary(obstacle->PerceptionBoundingBox(), &perception_sl)) {
return path_obstacle;
}
path_obstacle->SetPerceptionSlBoundary(perception_sl);
// 计算障碍物是否对无人车行驶有影响:无关障碍物满足以下条件:
// 1. 障碍物在ReferenceLine以外,忽略
// 2. 车辆和障碍物都在车道上,但是障碍物在无人车后面,忽略
if (IsUnrelaventObstacle(path_obstacle)) {
// 忽略障碍物
} else {
// 构建障碍物在参考线上的边界框
path_obstacle->BuildReferenceLineStBoundary(reference_line_, adc_sl_boundary_.start_s());
}
return path_obstacle;
}
/// file in apollo/modules/planning/common/path_obstacle.cc
void PathObstacle::BuildReferenceLineStBoundary(const ReferenceLine& reference_line, const double adc_start_s) {
if (obstacle_->IsStatic() || obstacle_->Trajectory().trajectory_point().empty()) {
...
} else {
if (BuildTrajectoryStBoundary(reference_line, adc_start_s, &reference_line_st_boundary_)) {
...
} else {
ADEBUG << "No st_boundary for obstacle " << id_;
}
}
}这里对PathObstacle::BuildTrajectorySt Boundary函数进行简单的分析:
Step 1. 对障碍物轨迹点两两选择,每两个点可以构建上图中的object_moving_box以及object_boundary;
bool PathObstacle::BuildTrajectoryStBoundary(
const ReferenceLine& reference_line, const double adc_start_s,
StBoundary* const st_boundary) {
for (int i = 1; i < trajectory_points.size(); ++i) {
const auto& first_traj_point = trajectory_points[i - 1];
const auto& second_traj_point = trajectory_points[i];
const auto& first_point = first_traj_point.path_point();
const auto& second_point = second_traj_point.path_point();
double total_length = object_length + common::util::DistanceXY(first_point, second_point); //object_moving_box总长度
common::math::Vec2d center((first_point.x() + second_point.x()) / 2.0, // object_moving_box中心
(first_point.y() + second_point.y()) / 2.0);
common::math::Box2d object_moving_box(center, first_point.theta(), total_length, object_width);
...
// 计算object_boundary,由object_moving_box旋转一个heading得到,记录障碍物形式段的start_s, end_s, start_l和end_l
if (!reference_line.GetApproximateSLBoundary(object_moving_box, start_s, end_s, &object_boundary)) {
return false;
}
}
}Step 2. 判断障碍物和车辆横向Lateral距离,如果障碍物在参考线两侧,那么障碍物可以忽略;如果障碍物在参考线后面,也可忽略;
// skip if object is entirely on one side of reference line.
constexpr double kSkipLDistanceFactor = 0.4;
const double skip_l_distance =
(object_boundary.end_s() - object_boundary.start_s()) *
kSkipLDistanceFactor + adc_width / 2.0;
if (std::fmin(object_boundary.start_l(), object_boundary.end_l()) > // 障碍物在参考线左侧,那么无人车可以直接通过障碍物,可忽略障碍物
skip_l_distance ||
std::fmax(object_boundary.start_l(), object_boundary.end_l()) < // 障碍物在参考线右侧,那么无人车可以直接通过障碍物,可忽略障碍物
-skip_l_distance) {
continue;
}
if (object_boundary.end_s() < 0) { // 障碍物在参考线后面,可忽略障碍物
continue;
}Step 3. 计算low_t和high_t时刻的行驶上下界边界框;
const double delta_t = second_traj_point.relative_time() - first_traj_point.relative_time(); // 0.1s
double low_s = std::max(object_boundary.start_s() - adc_half_length, 0.0);
bool has_low = false;
double high_s = std::min(object_boundary.end_s() + adc_half_length, FLAGS_st_max_s);
bool has_high = false;
while (low_s + st_boundary_delta_s < high_s && !(has_low && has_high)) {
if (!has_low) { // 采用渐进逼近的方法,逐渐计算边界框的下界
auto low_ref = reference_line.GetReferencePoint(low_s);
has_low = object_moving_box.HasOverlap({low_ref, low_ref.heading(), adc_length, adc_width});
low_s += st_boundary_delta_s;
}
if (!has_high) { // 采用渐进逼近的方法,逐渐计算边界框的上界
auto high_ref = reference_line.GetReferencePoint(high_s);
has_high = object_moving_box.HasOverlap({high_ref, high_ref.heading(), adc_length, adc_width});
high_s -= st_boundary_delta_s;
}
}
if (has_low && has_high) {
low_s -= st_boundary_delta_s;
high_s += st_boundary_delta_s;
double low_t = (first_traj_point.relative_time() +
std::fabs((low_s - object_boundary.start_s()) / object_s_diff) * delta_t);
polygon_points.emplace_back( // 计算low_t时刻的上下界
std::make_pair(STPoint{low_s - adc_start_s, low_t},
STPoint{high_s - adc_start_s, low_t}));
double high_t =
(first_traj_point.relative_time() +
std::fabs((high_s - object_boundary.start_s()) / object_s_diff) * delta_t);
if (high_t - low_t > 0.05) {
polygon_points.emplace_back( // 计算high_t时刻的上下界
std::make_pair(STPoint{low_s - adc_start_s, high_t},
STPoint{high_s - adc_start_s, high_t}));
}
}Step 4. 计算完所有障碍物轨迹段的上下界框以后,根据时间t进行排序;
if (!polygon_points.empty()) {
std::sort(polygon_points.begin(), polygon_points.end(),
[](const std::pair<STPoint, STPoint>& a,
const std::pair<STPoint, STPoint>& b) {
return a.first.t() < b.first.t();
});
auto last = std::unique(polygon_points.begin(), polygon_points.end(),
[](const std::pair<STPoint, STPoint>& a,
const std::pair<STPoint, STPoint>& b) {
return std::fabs(a.first.t() - b.first.t()) <
kStBoundaryDeltaT;
});
polygon_points.erase(last, polygon_points.end());
if (polygon_points.size() > 2) {
*st_boundary = StBoundary(polygon_points);
}
} else {
return false;
}障碍物轨迹与Reference Line融合的的过程,其实就是计算障碍物在无人车规划轨迹上的重叠部分的位置s,以及行驶到这个重叠部分的时间点t,为第三部分每个障碍物在每个车辆上的初步决策提供依据。
3. 根据交通规则进行障碍物Decision
第2节中给出了每个障碍物在所有的参考线上的重叠部分的位置与时间点,这些重叠部分就是无人车需要考虑的规划矫正问题,避免发生交通事故。
因为障碍物运动可能跨越多个ReferenceLine,所以需要对于每个障碍物进行标定,是否可忽略,是否会超车等。
交通规则判定情况一共11种,在文件modules/planning/conf/traffic_rule_config.pb.txt中定义,这里我们将一一列举。
后车情况处理--BACKSIDE_VEHICLE
变道情况处理--CHANGE_LANE
人行横道情况处理--CROSSWALK
目的地情况处理--DESTINATION
前车情况处理--FRONT_VEHICLE
禁停区情况处理--KEEP_CLEAR
寻找停车点状态--PULL_OVER
参考线结束情况处理--REFERENCE_LINE_END
重新路由查询情况处理--REROUTING
信号灯情况处理--SIGNAL_LIGHT
停车情况处理--STOP_SIGN
/// file in apollo/modules/planning/planning.cc
void Planning::RunOnce() {
const uint32_t frame_num = AdapterManager::GetPlanning()->GetSeqNum() + 1;
status = InitFrame(frame_num, stitching_trajectory.back(), start_timestamp, vehicle_state);
for (auto& ref_line_info : frame_->reference_line_info()) {
TrafficDecider traffic_decider;
traffic_decider.Init(traffic_rule_configs_);
auto traffic_status = traffic_decider.Execute(frame_.get(), &ref_line_info);
if (!traffic_status.ok() || !ref_line_info.IsDrivable()) {
ref_line_info.SetDrivable(false);
continue;
}
}
}
/// file in apollo/modules/planning/tasks/traffic_decider/traffic_decider.cc
Status TrafficDecider::Execute(Frame *frame, ReferenceLineInfo *reference_line_info) {
for (const auto &rule_config : rule_configs_.config()) { // 对于每条参考线进行障碍物的决策。
if (!rule_config.enabled()) {
continue;
}
auto rule = s_rule_factory.CreateObject(rule_config.rule_id(), rule_config);
if (!rule) {
continue;
}
rule->ApplyRule(frame, reference_line_info);
}
BuildPlanningTarget(reference_line_info);
return Status::OK();
}3.1 后车情况处理(BACKSIDE_VEHICLE)
/// file in apollo/modules/planning/tasks/traffic_decider/backside_vehicle.cc
Status BacksideVehicle::ApplyRule(Frame* const, ReferenceLineInfo* const reference_line_info) {
auto* path_decision = reference_line_info->path_decision();
const auto& adc_sl_boundary = reference_line_info->AdcSlBoundary();
if (reference_line_info->Lanes().IsOnSegment()) { // The lane keeping reference line.
MakeLaneKeepingObstacleDecision(adc_sl_boundary, path_decision);
}
return Status::OK();
}
void BacksideVehicle::MakeLaneKeepingObstacleDecision(const SLBoundary& adc_sl_boundary, PathDecision* path_decision) {
ObjectDecisionType ignore; // 从这里可以看到,对于后车的处理主要是忽略
ignore.mutable_ignore();
const double adc_length_s = adc_sl_boundary.end_s() - adc_sl_boundary.start_s(); // 计算"车长""
for (const auto* path_obstacle : path_decision->path_obstacles().Items()) { // 对于每个与参考线有重叠的障碍物进行规则设置
...
}
}从上述代码可以看到,后车情况仅仅针对当前无人车所在的参考线,那些临近的参考线不做考虑。
主要处理流程如下:
前车在这里不做考虑,由前车情况处理FRONT_VEHICLE来完成;
if (path_obstacle->PerceptionSLBoundary().end_s() >= adc_sl_boundary.end_s()) { // don't ignore such vehicles.
continue;
}参考线上没有障碍物运动轨迹,直接忽略;
if (path_obstacle->reference_line_st_boundary().IsEmpty()) {
path_decision->AddLongitudinalDecision("backside_vehicle/no-st-region", path_obstacle->Id(), ignore);
path_decision->AddLateralDecision("backside_vehicle/no-st-region", path_obstacle->Id(), ignore);
continue;
}忽略从无人车后面来的车辆
// Ignore the car comes from back of ADC
if (path_obstacle->reference_line_st_boundary().min_s() < -adc_length_s) {
path_decision->AddLongitudinalDecision("backside_vehicle/st-min-s < adc", path_obstacle->Id(), ignore);
path_decision->AddLateralDecision("backside_vehicle/st-min-s < adc", path_obstacle->Id(), ignore);
continue;
}通过计算min_s,也就是障碍物轨迹距离无人车最近的距离,小于半车长度,说明车辆在无人车后面,可暂时忽略。
忽略后面不会超车的车辆
const double lane_boundary = config_.backside_vehicle().backside_lane_width(); // 4m
if (path_obstacle->PerceptionSLBoundary().start_s() < adc_sl_boundary.end_s()) {
if (path_obstacle->PerceptionSLBoundary().start_l() > lane_boundary ||
path_obstacle->PerceptionSLBoundary().end_l() < -lane_boundary) {
continue;
}
path_decision->AddLongitudinalDecision("backside_vehicle/sl < adc.end_s", path_obstacle->Id(), ignore);
path_decision->AddLateralDecision("backside_vehicle/sl < adc.end_s", path_obstacle->Id(), ignore);
continue;
}
}第一个if可以选择那些在无人车后(至少不超过无人车)的车辆;第二个if,可以计算车辆与无人车的横向距离,如果超过阈值,那么就说明车辆横向距离无人车足够远,有可能会进行超车,这种情况不能忽略,留到后面的交通规则去处理;若小于这个阈值,则可以间接说明不太会超车,后车可能跟随无人车前进。
3.2 变道情况处理(CHANGE_LANE)
在变道情况下,首先要找到那些需要警惕的障碍物(包括跟随车辆和超车车辆),这些障碍物轨迹是会影响无人车的变道轨迹;然后为每个障碍物设立一个超车警示(障碍物和无人车的位置与速度等信息)供下一步规划阶段参考。
/// file in apollo/modules/planning/tasks/traffic_decider/change_lane.cc
Status ChangeLane::ApplyRule(Frame* const frame, ReferenceLineInfo* const reference_line_info) {
// 如果是直行道,不需要变道,则忽略
if (reference_line_info->Lanes().IsOnSegment()) {
return Status::OK();
}
// 计算警示障碍物&超车障碍物
guard_obstacles_.clear();
overtake_obstacles_.clear();
if (!FilterObstacles(reference_line_info)) {
return Status(common::PLANNING_ERROR, "Failed to filter obstacles");
}
// 创建警示障碍物类
if (config_.change_lane().enable_guard_obstacle() && !guard_obstacles_.empty()) {
for (const auto path_obstacle : guard_obstacles_) {
auto* guard_obstacle = frame->Find(path_obstacle->Id());
if (guard_obstacle && CreateGuardObstacle(reference_line_info, guard_obstacle)) {
AINFO << "Created guard obstacle: " << guard_obstacle->Id();
}
}
}
// 设置超车标志
if (!overtake_obstacles_.empty()) {
auto* path_decision = reference_line_info->path_decision();
const auto& reference_line = reference_line_info->reference_line();
for (const auto* path_obstacle : overtake_obstacles_) {
auto overtake = CreateOvertakeDecision(reference_line, path_obstacle);
path_decision->AddLongitudinalDecision(
TrafficRuleConfig::RuleId_Name(Id()), path_obstacle->Id(), overtake);
}
}
return Status::OK();
}3.2.1 超车&警示障碍物计算
没有轨迹的障碍物,忽略;
if (!obstacle->HasTrajectory()) {
continue;
}无人车前方的车辆对变道没有影响,忽略;
if (path_obstacle->PerceptionSLBoundary().start_s() > adc_sl_boundary.end_s()) {
continue;
}跟车在一定距离(10m)内,将其标记为超车障碍物;
if (path_obstacle->PerceptionSLBoundary().end_s() <
adc_sl_boundary.start_s() -
std::max(config_.change_lane().min_overtake_distance(), // min_overtake_distance: 10m
obstacle->Speed() * min_overtake_time)) { // min_overtake_time: 2s
overtake_obstacles_.push_back(path_obstacle);
}障碍物速度很小或者障碍物最后不在参考线上,对变道没影响,忽略;
if (last_point.v() < config_.change_lane().min_guard_speed()) {
continue;
}
if (!reference_line.IsOnRoad(last_point.path_point())) {
continue;
}障碍物最后一规划点在参考线上,但是超过了无人车一定距离,对变道无影响,忽略;
SLPoint last_sl;
if (!reference_line.XYToSL(last_point.path_point(), &last_sl)) {
continue;
}
if (last_sl.s() < 0 || last_sl.s() > adc_sl_boundary.end_s() + kGuardForwardDistance) {
continue;
}3.2.2 创建警示障碍物类
创建警示障碍物类本质其实就是预测障碍物未来一段时间内的运动轨迹,代码在ChangeLane::CreateGuardObstacle中给出了障碍物轨迹的预测方法。预测的轨迹是在原始轨迹上进行拼接,即在最后一个轨迹点后面再次进行预测,预测的假设是,障碍物沿着参考线行驶。
几个注意点:
预测长度:障碍物预测轨迹到无人车前方100m(config_.change_lane().guard_distance())这段距离;
障碍物速度假定:这段距离内,默认障碍物速度和最后一个轨迹点速度一致(extend_v),并且沿着参考线前进;
预测频率: 每两个点之间的距离为障碍物长度,所以两个点之间的相对时间差为:time_delta = kStepDistance / extend_v
3.2.3 创建障碍物超车标签
/// file in apollo/modules/planning/tasks/traffic_decider/change_lane.cc
ObjectDecisionType ChangeLane::CreateOvertakeDecision(
const ReferenceLine& reference_line, const PathObstacle* path_obstacle) const {
ObjectDecisionType overtake;
overtake.mutable_overtake();
const double speed = path_obstacle->obstacle()->Speed();
double distance = std::max(speed * config_.change_lane().min_overtake_time(), // 设置变道过程中,障碍物运动距离
config_.change_lane().min_overtake_distance());
overtake.mutable_overtake()->set_distance_s(distance);
double fence_s = path_obstacle->PerceptionSLBoundary().end_s() + distance;
auto point = reference_line.GetReferencePoint(fence_s); // 设置变道完成后,障碍物在参考线上的位置
overtake.mutable_overtake()->set_time_buffer(config_.change_lane().min_overtake_time()); // 设置变道需要的最小时间
overtake.mutable_overtake()->set_distance_s(distance); // 设置变道过程中,障碍物前进的距离
overtake.mutable_overtake()->set_fence_heading(point.heading());
overtake.mutable_overtake()->mutable_fence_point()->set_x(point.x()); // 设置变道完成后,障碍物的坐标
overtake.mutable_overtake()->mutable_fence_point()->set_y(point.y());
overtake.mutable_overtake()->mutable_fence_point()->set_z(0.0);
return overtake;
}3.3 人行横道情况处理--CROSSWALK
根据礼让规则,当行人或者非机动车距离很远,无人车可以开过人行横道;当人行横道上有人经过时,必须停车让行。
/// file in apollo/modules/planning/tasks/traffic_decider/crosswalk.cc
Status Crosswalk::ApplyRule(Frame* const frame, ReferenceLineInfo* const reference_line_info) {
// 检查是否存在人行横道区域
if (!FindCrosswalks(reference_line_info)) {
return Status::OK();
}
// 为每个障碍物做标记,障碍物存在时,无人车应该停车还是直接驶过
MakeDecisions(frame, reference_line_info);
return Status::OK();
}检查在每个人行横道区域内,是否存在障碍物需要无人车停车让行
如果车辆已经驶过人行横道一部分,那么就忽略,不需要停车;
// skip crosswalk if master vehicle body already passes the stop line
double stop_line_end_s = crosswalk_overlap->end_s;
if (adc_front_edge_s - stop_line_end_s > config_.crosswalk().min_pass_s_distance()) { // 车头驶过人行横道一定距离,min_pass_s_distance:1.0
continue;
}遍历每个人行道区域的障碍物(行人和非机动车),并将人行横道区域扩展,提高安全性。如果障碍物不在扩展后的人行横道内(可能在路边或者其他区域),则忽略。
// expand crosswalk polygon
// note: crosswalk expanded area will include sideway area
Vec2d point(perception_obstacle.position().x(),
perception_obstacle.position().y());
const Polygon2d crosswalk_poly = crosswalk_ptr->polygon();
bool in_crosswalk = crosswalk_poly.IsPointIn(point);
const Polygon2d crosswalk_exp_poly = crosswalk_poly.ExpandByDistance(
config_.crosswalk().expand_s_distance());
bool in_expanded_crosswalk = crosswalk_exp_poly.IsPointIn(point);
if (!in_expanded_crosswalk) {
continue;
}计算障碍物到参考线的横向距离obstacle_l_distance,是否在参考线上(附近)is_on_road,障碍物轨迹是否与参考线相交is_path_cross;
如果横向距离大于疏松距离&&轨迹相交,那么需要停车;反之直接驶过(此时轨迹相交无所谓,因为横向距离比较远);
if (obstacle_l_distance >= config_.crosswalk().stop_loose_l_distance()) { // stop_loose_l_distance: 5.0m
// (1) when obstacle_l_distance is big enough(>= loose_l_distance),
// STOP only if path crosses
if (is_path_cross) {
stop = true;
}
}如果横向距离小于紧凑距离&&障碍物在参考线或者轨迹相交,那么需要停车;反之直接驶过;
else if (obstacle_l_distance <= config_.crosswalk().stop_strick_l_distance()) { // stop_strick_l_distance: 4.0m
// (2) when l_distance <= strick_l_distance + on_road(not on sideway),
// always STOP
// (3) when l_distance <= strick_l_distance + not on_road(on sideway),
// STOP only if path crosses
if (is_on_road || is_path_cross) {
stop = true;
}
}如果横向距离在紧凑距离和疏松距离之间,直接停车;
else {
// TODO(all)
// (4) when l_distance is between loose_l and strick_l
// use history decision of this crosswalk to smooth unsteadiness
stop = true;
}如果存在障碍物需要无人车停车让行,可以计算无人车的加速度(是否来的及减速,若无人车速度很快减速不了,那么干脆直接驶过)。
对影响无人车行驶的障碍物构建虚拟墙障碍物类&设置停车标签
什么是构建虚拟墙类?其实很简单,无人车在行驶过程中必须要与障碍物保持一定的距离,那么只要以障碍物为中心,构建一个长度为0.1,宽度为车道宽度的虚拟墙,保证无人车和这个虚拟墙障碍物不相交,就能确保安全。
// create virtual stop wall
std::string virtual_obstacle_id =
CROSSWALK_VO_ID_PREFIX + crosswalk_overlap->object_id;
auto* obstacle = frame->CreateStopObstacle(
reference_line_info, virtual_obstacle_id, crosswalk_overlap->start_s);
if (!obstacle) {
AERROR << "Failed to create obstacle[" << virtual_obstacle_id << "]";
return -1;
}
PathObstacle* stop_wall = reference_line_info->AddObstacle(obstacle);
if (!stop_wall) {
AERROR << "Failed to create path_obstacle for: " << virtual_obstacle_id;
return -1;
}这里的障碍物PredictionObstacle相对于Obstacle多了一个区域框Box2d。然后对这些虚拟墙添加停车标志。
// build stop decision
const double stop_s = // 计算停车位置的累计距离,stop_distance:1m,人行横道前1m处停车
crosswalk_overlap->start_s - config_.crosswalk().stop_distance();
auto stop_point = reference_line.GetReferencePoint(stop_s);
double stop_heading = reference_line.GetReferencePoint(stop_s).heading();
ObjectDecisionType stop;
auto stop_decision = stop.mutable_stop();
stop_decision->set_reason_code(StopReasonCode::STOP_REASON_CROSSWALK);
stop_decision->set_distance_s(-config_.crosswalk().stop_distance());
stop_decision->set_stop_heading(stop_heading); // 设置停车点的角度/方向
stop_decision->mutable_stop_point()->set_x(stop_point.x()); // 设置停车点的坐标
stop_decision->mutable_stop_point()->set_y(stop_point.y());
stop_decision->mutable_stop_point()->set_z(0.0);
for (auto pedestrian : pedestrians) {
stop_decision->add_wait_for_obstacle(pedestrian); // 设置促使无人车停车的障碍物id
}
auto* path_decision = reference_line_info->path_decision();
path_decision->AddLongitudinalDecision(
TrafficRuleConfig::RuleId_Name(config_.rule_id()), stop_wall->Id(), stop);3.4 目的地情况处理(DESTINATION)
到达目的地情况下,障碍物促使无人车采取的行动无非是靠边停车或者寻找合适的停车点。决策规则比较简单:
若当前正处于PULL_OVER状态,则继续保持;
auto* planning_state = GetPlanningStatus()->mutable_planning_state();
if (planning_state->has_pull_over() && planning_state->pull_over().in_pull_over()) {
PullOver(nullptr);
ADEBUG << "destination: continue PULL OVER";
return 0;
}检查车辆当前是否需要进入ULL_OVER,主要参考和目的地之间的距离以及是否允许使用PULL_OVER;
const auto& routing = AdapterManager::GetRoutingResponse()->GetLatestObserved();
const auto& routing_end = *routing.routing_request().waypoint().rbegin();
double dest_lane_s = std::max( // stop_distance: 0.5,目的地0.5m前停车
0.0, routing_end.s() - FLAGS_virtual_stop_wall_length -
config_.destination().stop_distance());
common::PointENU dest_point;
if (CheckPullOver(reference_line_info, routing_end.id(), dest_lane_s, &dest_point)) {
PullOver(&dest_point);
} else {
Stop(frame, reference_line_info, routing_end.id(), dest_lane_s);
}CheckPullOver检查机制(Apollo在DESTINATION中不启用PULL_OVER)
若在目的地情况下不启用PULL_OVER机制,则返回false;
if (!config_.destination().enable_pull_over()) {
return false;
}若目的地不在参考线上,返回false;
const auto dest_lane = HDMapUtil::BaseMapPtr()->GetLaneById(hdmap::MakeMapId(lane_id));
const auto& reference_line = reference_line_info->reference_line();
// check dest OnRoad
double dest_lane_s = std::max(
0.0, lane_s - FLAGS_virtual_stop_wall_length -
config_.destination().stop_distance());
*dest_point = dest_lane->GetSmoothPoint(dest_lane_s);
if (!reference_line.IsOnRoad(*dest_point)) {
return false;
}若无人车与目的地距离太远,则返回false;
// check dest within pull_over_plan_distance
common::SLPoint dest_sl;
if (!reference_line.XYToSL({dest_point->x(), dest_point->y()}, &dest_sl)) {
return false;
}
double adc_front_edge_s = reference_line_info->AdcSlBoundary().end_s();
double distance_to_dest = dest_sl.s() - adc_front_edge_s;
// pull_over_plan_distance: 55m
if (distance_to_dest > config_.destination().pull_over_plan_distance()) {
// to far, not sending pull-over yet
return false;
}障碍物PULL_OVER和STOP标签设定
int Destination::PullOver(common::PointENU* const dest_point) {
auto* planning_state = GetPlanningStatus()->mutable_planning_state();
if (!planning_state->has_pull_over() || !planning_state->pull_over().in_pull_over()) {
planning_state->clear_pull_over();
auto pull_over = planning_state->mutable_pull_over();
pull_over->set_in_pull_over(true);
pull_over->set_reason(PullOverStatus::DESTINATION);
pull_over->set_status_set_time(Clock::NowInSeconds());
if (dest_point) {
pull_over->mutable_inlane_dest_point()->set_x(dest_point->x());
pull_over->mutable_inlane_dest_point()->set_y(dest_point->y());
}
}
return 0;
}Stop标签设定和人行横道情况处理中STOP一致,创建虚拟墙,并封装成新的PathObstacle加入该ReferenceLineInfo的PathDecision中。
3.5 前车情况处理(FRONT_VEHICLE)
在存在前车的情况下,障碍物对无人车的决策影响有两个:一是跟车等待机会超车(也有可能一直跟车,视障碍物信息决定);二是停车(障碍物是静态的,无人车必须停车);
跟车等待机会超车处理
当前车是运动的,并且超车条件良好,那么就存在超车的可能。这里定义的超车指代的需要无人车调整横向距离以后超车。要完成超车行为需要经过4个步骤:
正常驾驶(DRIVE)
等待超车(WAIT)
超车(SIDEPASS)
正常行驶(DRIVE)
若距离前过远,无人车就正常行驶;若距离比较近,但不满足超车条件,那么无人车将一直跟随前车正常行驶;若距离近但是速度很小(堵车),那么就需要等待;若条件满足后,就立即进入到超车过程,超车完成就又回到正常行驶状态。
Step 1. 检查超车条件--FrontVehicle::FindPassableObstacle
这个过程其实就是寻找有没有影响无人车正常行驶的障碍物。遍历PathDecision中的所有PathObstacle,依次检查以下条件:
是否是虚拟或者静态障碍物。若是,那么就需要采取停车策略,超车部分对这些不作处理;
if (path_obstacle->obstacle()->IsVirtual() || !path_obstacle->obstacle()->IsStatic()) {
ADEBUG << "obstacle_id[" << obstacle_id << "] type[" << obstacle_type_name
<< "] VIRTUAL or NOT STATIC. SKIP";
continue;
}检查障碍物与无人车位置关系。障碍物在无人车后方,直接忽略。
const auto& obstacle_sl = path_obstacle->PerceptionSLBoundary();
if (obstacle_sl.start_s() <= adc_sl_boundary.end_s()) {
ADEBUG << "obstacle_id[" << obstacle_id << "] type[" << obstacle_type_name
<< "] behind ADC. SKIP";
continue;
}检查横向与纵向距离。若纵向距离过远则忽略,依旧进行正常行驶;若侧方距离过大,可直接忽略障碍物,直接正常向前行驶。
const double side_pass_s_threshold = config_.front_vehicle().side_pass_s_threshold(); // side_pass_s_threshold: 15m
if (obstacle_sl.start_s() - adc_sl_boundary.end_s() > side_pass_s_threshold) {
continue;
}
const double side_pass_l_threshold = config_.front_vehicle().side_pass_l_threshold(); // side_pass_l_threshold: 1m
if (obstacle_sl.start_l() > side_pass_l_threshold ||
obstacle_sl.end_l() < -side_pass_l_threshold) {
continue;
}FrontVehicle::FindPassableObstacle函数最后会返回第一个找到的限制无人车行驶的障碍物。
Step 2. 设定超车各阶段标志--FrontVehicle::ProcessSidePass
若上阶段处于SidePassStatus::UNKNOWN状态,设置为正常行驶;
若上阶段处于SidePassStatus::DRIVE状态,并且障碍物阻塞(存在需要超车条件),那么设置为等待超车;否则前方没有障碍物,继续正常行驶;
case SidePassStatus::DRIVE: {
constexpr double kAdcStopSpeedThreshold = 0.1; // unit: m/s
const auto& adc_planning_point = reference_line_info->AdcPlanningPoint();
if (!passable_obstacle_id.empty() && // 前方有障碍物则需要等待
adc_planning_point.v() < kAdcStopSpeedThreshold) {
sidepass_status->set_status(SidePassStatus::WAIT);
sidepass_status->set_wait_start_time(Clock::NowInSeconds());
}
break;
}若上阶段处于SidePassStatus::WAIT状态,若前方已无障碍物,设置为正常行驶;否则视情况而定:
a. 前方已无碍物,设置为正常行驶
b. 前方有障碍物,检查已等待的时间,超过阈值,寻找左右有效车道超车;若无有效车道,则一直堵车等待。
double wait_start_time = sidepass_status->wait_start_time();
double wait_time = Clock::NowInSeconds() - wait_start_time; // 计算已等待的时间
if (wait_time > config_.front_vehicle().side_pass_wait_time()) { // 超过阈值,寻找其他车道超车。side_pass_wait_time:30s
}查询HDMap,计算当前ReferenceLine所在的车道Lane。
若存在左车道,那么设置左超车;
若不存在左侧车道,那么检查右车道;如果右车道是机动车道(CITY_DRIVING),不是非机动车道(BIKING),不是步行街(SIDEWALK),也不是停车道(PAKING),那么可以进行右超车。
if (enter_sidepass_mode) {
sidepass_status->set_status(SidePassStatus::SIDEPASS);
sidepass_status->set_pass_obstacle_id(passable_obstacle_id);
sidepass_status->clear_wait_start_time();
sidepass_status->set_pass_side(side); // side知识左超车还是右超车。取值为ObjectSidePass::RIGHT或ObjectSidePass::LEFT
}若上阶段处于SidePassStatus::SIDEPASS状态,若前方已无障碍物,设置为正常行驶;反之继续处于超车过程。
case SidePassStatus::SIDEPASS: {
if (passable_obstacle_id.empty()) {
sidepass_status->set_status(SidePassStatus::DRIVE);
}
break;
}停车处理
首先检查障碍物是不是静止物体(非堵车情况)。若是虚拟的或者动态障碍物,则忽略,由超车模块处理;
if (path_obstacle->obstacle()->IsVirtual() || !path_obstacle->obstacle()->IsStatic()) {
continue;
}检查障碍物和无人车位置。若障碍物在无人车后,忽略,由后车模块处理;
const auto& obstacle_sl = path_obstacle->PerceptionSLBoundary();
if (obstacle_sl.end_s() <= adc_sl.start_s()) {
continue;
}障碍物已经在超车模块中被标记,迫使无人车超车,那么此时就不需要考虑该障碍物;
// check SIDE_PASS decision
if (path_obstacle->LateralDecision().has_sidepass()) {
continue;
}检查是否必须要停车、车道有没有足够的宽度来允许无人车超车;
double left_width = 0.0;
double right_width = 0.0;
reference_line.GetLaneWidth(obstacle_sl.start_s(), &left_width, &right_width);
double left_driving_width = left_width - obstacle_sl.end_l() - // 计算障碍物左侧空余距离
config_.front_vehicle().nudge_l_buffer();
double right_driving_width = right_width + obstacle_sl.start_l() - // 计算障碍物右侧空余距离,+号是因为车道线FLU坐标系左侧l是负轴,右侧是正轴
config_.front_vehicle().nudge_l_buffer();
if ((left_driving_width < adc_width && right_driving_width < adc_width) ||
(obstacle_sl.start_l() <= 0.0 && obstacle_sl.end_l() >= 0.0)) {
// build stop decision
double stop_distance = path_obstacle->MinRadiusStopDistance(vehicle_param);
const double stop_s = obstacle_sl.start_s() - stop_distance;
auto stop_point = reference_line.GetReferencePoint(stop_s);
double stop_heading = reference_line.GetReferencePoint(stop_s).heading();
ObjectDecisionType stop;
auto stop_decision = stop.mutable_stop();
if (obstacle_type == PerceptionObstacle::UNKNOWN_MOVABLE ||
obstacle_type == PerceptionObstacle::BICYCLE ||
obstacle_type == PerceptionObstacle::VEHICLE) {
stop_decision->set_reason_code(StopReasonCode::STOP_REASON_HEAD_VEHICLE);
} else {
stop_decision->set_reason_code(StopReasonCode::STOP_REASON_OBSTACLE);
}
stop_decision->set_distance_s(-stop_distance);
stop_decision->set_stop_heading(stop_heading);
stop_decision->mutable_stop_point()->set_x(stop_point.x());
stop_decision->mutable_stop_point()->set_y(stop_point.y());
stop_decision->mutable_stop_point()->set_z(0.0);
path_decision->AddLongitudinalDecision("front_vehicle", path_obstacle->Id(), stop);
}3.6 禁停区情况处理(KEEP_CLEAR)
禁停区分为两类:第一类是传统的禁停区,第二类是交叉路口。对禁停区的处理和对人行横道上的障碍物构建虚拟墙很相似,具体做法是在参考线上构建一块禁停区,从纵向的start_s到end_s(这里的start_s和end_s是禁停区start_s和end_s在参考线上的投影点),禁停区宽度是参考线的道路宽。
具体的处理流程为(禁停区和交叉路口处理流程一致):
检查无人车是否已经驶入禁停区或者交叉路口,是则可直接忽略;
// check
const double adc_front_edge_s = reference_line_info->AdcSlBoundary().end_s();
if (adc_front_edge_s - keep_clear_overlap->start_s >
config_.keep_clear().min_pass_s_distance()) { // min_pass_s_distance:2.0m
return false;
}创建新的禁停区障碍物,并且打上标签为不能停车;
// create virtual static obstacle
auto* obstacle = frame->CreateStaticObstacle(
reference_line_info, virtual_obstacle_id, keep_clear_overlap->start_s,
keep_clear_overlap->end_s);
if (!obstacle) {
return false;
}
auto* path_obstacle = reference_line_info->AddObstacle(obstacle);
if (!path_obstacle) {
return false;
}
path_obstacle->SetReferenceLineStBoundaryType(StBoundary::BoundaryType::KEEP_CLEAR);这里额外补充下创建禁停区障碍物流程,主要还是计算禁停区障碍物的Bounding Box,即center和length,width;
/// file in apollo/modules/planning/common/frame.cc
const Obstacle *Frame::CreateStaticObstacle(
ReferenceLineInfo *const reference_line_info,
const std::string &obstacle_id,
const double obstacle_start_s,
const double obstacle_end_s) {
const auto &reference_line = reference_line_info->reference_line();
// 计算禁停区障碍物start_xy,需要映射到ReferenceLine
common::SLPoint sl_point;
sl_point.set_s(obstacle_start_s);
sl_point.set_l(0.0);
common::math::Vec2d obstacle_start_xy;
if (!reference_line.SLToXY(sl_point, &obstacle_start_xy)) {
return nullptr;
}
// 计算禁停区障碍物end_xy,需要映射到ReferenceLine
sl_point.set_s(obstacle_end_s);
sl_point.set_l(0.0);
common::math::Vec2d obstacle_end_xy;
if (!reference_line.SLToXY(sl_point, &obstacle_end_xy)) {
return nullptr;
}
// 计算禁停区障碍物左侧宽度和右侧宽度,与参考线一致
double left_lane_width = 0.0;
double right_lane_width = 0.0;
if (!reference_line.GetLaneWidth(obstacle_start_s, &left_lane_width, &right_lane_width)) {
return nullptr;
}
// 最终可以得到禁停区障碍物的标定框
common::math::Box2d obstacle_box{
common::math::LineSegment2d(obstacle_start_xy, obstacle_end_xy),
left_lane_width + right_lane_width};
// CreateStaticVirtualObstacle函数是将禁停区障碍物封装成PathObstacle放入PathDecision中
return CreateStaticVirtualObstacle(obstacle_id, obstacle_box);
}3.7 寻找停车点状态(PULL_OVER)
寻找停车点本质上是寻找停车的位置。如果当前已经有停车位置(也就是上个状态就是PULL_OVER),那么就只需要更新状态信息即可;若不存在,那么就需要计算停车点的位置,然后构建停车区障碍物(同人行横道虚拟墙障碍物和禁停区障碍物),然后创建障碍物的PULL_OVER标签。
Status PullOver::ApplyRule(Frame* const frame, ReferenceLineInfo* const reference_line_info) {
frame_ = frame;
reference_line_info_ = reference_line_info;
if (!IsPullOver()) {
return Status::OK();
}
// 检查上时刻是不是PULL_OVER,如果是PULL_OVER,那么说明已经有停车点stop_point
if (CheckPullOverComplete()) {
return Status::OK();
}
common::PointENU stop_point;
if (GetPullOverStop(&stop_point) != 0) { // 获取停车位置失败,无人车将在距离终点的车道上进行停车
BuildInLaneStop(stop_point);
ADEBUG << "Could not find a safe pull over point. STOP in-lane";
} else {
BuildPullOverStop(stop_point); // 获取停车位置成功,无人车将在距离终点的车道上靠边进行停车
}
return Status::OK();
}代码也是比较容易理解,这里我们挑几个要点象征性的解释一下。
获取停车点--GetPullOverStop函数
如果状态信息中已经存在停车点位置并且有效,那么直接拿来用;
if (pull_over_status.has_start_point() && pull_over_status.has_stop_point()) {
// reuse existing/previously-set stop point
stop_point->set_x(pull_over_status.stop_point().x());
stop_point->set_y(pull_over_status.stop_point().y());
}如果不存在,那么就需要寻找停车位置--FindPullOverStop函数;
停车位置需要在目的地点前PARKING_SPOT_LONGITUDINAL_BUFFER(默认1m),距离路侧buffer_to_boundary(默认0.5m)处停车。
但是停车条件必须满足在路的最边上,也就意味着这条lane的右侧lane不能是机动车道(CITY_DRIVING)。
Apollo采用的方法为采样检测,从车头到终点位置,每隔kDistanceUnit(默认5m)进行一次停车条件检查,满足则直接停车。
int PullOver::FindPullOverStop(PointENU* stop_point) {
const auto& reference_line = reference_line_info_->reference_line();
const double adc_front_edge_s = reference_line_info_->AdcSlBoundary().end_s();
double check_length = 0.0;
double total_check_length = 0.0;
double check_s = adc_front_edge_s; // check_s为当前车辆车头的累计距离
constexpr double kDistanceUnit = 5.0;
while (check_s < reference_line.Length() && // 在当前车道上,向前采样方式进行停车位置检索,前向检索距离不超过max_check_distance(默认60m)
total_check_length < config_.pull_over().max_check_distance()) {
check_s += kDistanceUnit;
total_check_length += kDistanceUnit;
...
}
}检查该点(check_s)位置右车道,如果右车道还是机动车道,那么该点不能停车,至少需要变道,继续前向搜索。
// check rightmost driving lane:
// NONE/CITY_DRIVING/BIKING/SIDEWALK/PARKING
bool rightmost_driving_lane = true;
for (auto& neighbor_lane_id : lane->lane().right_neighbor_forward_lane_id()) { //
const auto neighbor_lane = HDMapUtil::BaseMapPtr()->GetLaneById(neighbor_lane_id);
...
const auto& lane_type = neighbor_lane->lane().type();
if (lane_type == hdmap::Lane::CITY_DRIVING) { //
rightmost_driving_lane = false;
break;
}
}
if (!rightmost_driving_lane) {
check_length = 0.0;
continue;
}如果右侧车道不是机动车道,那么路侧允许停车。停车位置需要在目的地点前PARKING_SPOT_LONGITUDINAL_BUFFER(默认1m),距离路侧buffer_to_boundary(默认0.5m)处停车。
纵向与停车点的距离以车头为基准;侧方与停车点距离取{车头距离车道边线,车尾距离车道边线,车身中心距离车道边线}距离最小值。
// all the lane checks have passed
check_length += kDistanceUnit;
if (check_length >= config_.pull_over().plan_distance()) {
PointENU point;
// check corresponding parking_spot
if (FindPullOverStop(check_s, &point) != 0) {
// parking_spot not valid/available
check_length = 0.0;
continue;
}
stop_point->set_x(point.x());
stop_point->set_y(point.y());
return 0;
}如果在1中找到了停车位置,那么就直接对停车位置构建一个PathObstacle,然后设置它的标签Stop即可。创建停车区障碍物的方式跟上述相同,这里不重复讲解。该功能由函数BuildPullOverStop完成。
如果在1中找不到停车位置,那么就去寻找历史状态中的数据,找到了就根据2中的位置停车,找不到强行在车道上停车。该功能由函数BuildInLaneStop完成。
先去寻找历史数据的inlane_dest_point,也就是历史数据是否允许在车道上停车;
如果没找到,那么去寻找停车位置,如果找到了就可以进行2中的停车;
如果仍然没找到停车位置,去寻找类中使用过的inlane_adc_potiion_stop_point_,如果找到了可以进行2中的停车;如果依旧没找到,那么只能在距离终点plan_distance处的车道上强行停车,并更新inlane_adc_potiion_stop_point_供下次使用。
3.8 参考线结束情况处理(REFERENCE_LINE_END)
当参考线结束,一般就需要重新路由查询,所以无人车需要停车。这种情况下如果程序正常,一般是前方没有路了,需要重新查询当前位置到目的地新的路由。
具体的代码跟人行横道上的不可忽略障碍物一样,在参考线终点前构建一个停止墙障碍物,并设置标签为停车Stop。
Status ReferenceLineEnd::ApplyRule(Frame* frame, ReferenceLineInfo* const reference_line_info) {
const auto& reference_line = reference_line_info->reference_line();
// 检查参考线剩余的长度,足够则可忽略这个情况,min_reference_line_remain_length:50m
double remain_s = reference_line.Length() - reference_line_info->AdcSlBoundary().end_s();
if (remain_s > config_.reference_line_end().min_reference_line_remain_length()) {
return Status::OK();
}
// create avirtual stop wall at the end of reference line to stop the adc
std::string virtual_obstacle_id = REF_LINE_END_VO_ID_PREFIX + reference_line_info->Lanes().Id();
double obstacle_start_s = reference_line.Length() - 2 * FLAGS_virtual_stop_wall_length; // 在参考线终点前,创建停止墙障碍物
auto* obstacle = frame->CreateStopObstacle(reference_line_info, virtual_obstacle_id, obstacle_start_s);
if (!obstacle) {
return Status(common::PLANNING_ERROR, "Failed to create reference line end obstacle");
}
PathObstacle* stop_wall = reference_line_info->AddObstacle(obstacle);
if (!stop_wall) {
return Status(
common::PLANNING_ERROR, "Failed to create path obstacle for reference line end obstacle");
}
// build stop decision,设置障碍物停止标签
const double stop_line_s = obstacle_start_s - config_.reference_line_end().stop_distance();
auto stop_point = reference_line.GetReferencePoint(stop_line_s);
ObjectDecisionType stop;
auto stop_decision = stop.mutable_stop();
stop_decision->set_reason_code(StopReasonCode::STOP_REASON_DESTINATION);
stop_decision->set_distance_s(-config_.reference_line_end().stop_distance());
stop_decision->set_stop_heading(stop_point.heading());
stop_decision->mutable_stop_point()->set_x(stop_point.x());
stop_decision->mutable_stop_point()->set_y(stop_point.y());
stop_decision->mutable_stop_point()->set_z(0.0);
auto* path_decision = reference_line_info->path_decision();
path_decision->AddLongitudinalDecision(TrafficRuleConfig::RuleId_Name(config_.rule_id()), stop_wall->Id(), stop);
return Status::OK();
}3.9 重新路由查询情况处理(REROUTING)
根据具体路况进行处理,根据代码可以分为以下情况:
若当前参考线为直行,非转弯。那么暂时就不需要重新路由,等待新的路由;
若当前车辆不在参考线上,不需要重新路由,等待新的路由;
若当前车辆可以退出,不需要重新路由,等待新的路由;
若当前通道Passage终点不在参考线上,不需要重新路由,等待新的路由;
若参考线的终点距离无人车过远,不需要重新路由,等待新的路由;
若上时刻进行过路由查询,距离当前时间过短,不需要重新路由,等待新的路由;
其他情况,手动发起路由查询需求;
其实这个模块我有点不是特别敢肯定,只能做保留的解释。首先,代码Frame::Rerouting做的工作仅仅重新路由,得到当前位置到目的地的路径,这个过程并没有产生新的参考线,因为参考线的产生依赖于ReferenceLineProvider线程。所以说对于第二点,车辆不在参考线上,即使重新路由了,但是没有生成矫正的新参考线,所以重新路由也是无用功,反之还不如等待ReferenceLineProvider去申请重新路由并生成对应的参考线。所以说,2,3,4等情况的重点在于缺乏参考线,而不在于位置偏离。
3.10 信号灯情况处理(SIGNAL_LIGHT)
信号灯处理相对来说比较简单,无非是有红灯就停车;有黄灯速度小,就停车;有绿灯,或者黄灯速度大就直接驶过。
具体的处理步骤分为:
检查当前路况下是否有信号灯区域--由函数FindValidSignalLight完成;
signal_lights_from_path_.clear();
for (const hdmap::PathOverlap& signal_light : signal_lights) {
if (signal_light.start_s + config_.signal_light().min_pass_s_distance() >
reference_line_info->AdcSlBoundary().end_s()) {
signal_lights_from_path_.push_back(signal_light);
}
}获取TrafficLight Perception发布的信号等信息--由函数ReadSignals完成;
const TrafficLightDetection& detection =
AdapterManager::GetTrafficLightDetection()->GetLatestObserved();
for (int j = 0; j < detection.traffic_light_size(); j++) {
const TrafficLight& signal = detection.traffic_light(j);
detected_signals_[signal.id()] = &signal;
}
决策--由函数MakeDecisions完成
for (auto& signal_light : signal_lights_from_path_) {
// 1. 如果信号灯是红灯,并且加速度不是很大
// 2. 如果信号灯是未知,并且加速度不是很大
// 3. 如果信号灯是黄灯,并且加速度不是很大
// 以上三种情况,无人车停车,停车标签与前面一致
if ((signal.color() == TrafficLight::RED &&
stop_deceleration < config_.signal_light().max_stop_deceleration()) ||
(signal.color() == TrafficLight::UNKNOWN &&
stop_deceleration < config_.signal_light().max_stop_deceleration()) ||
(signal.color() == TrafficLight::YELLOW &&
stop_deceleration < config_.signal_light().max_stop_deacceleration_yellow_light())) {
if (BuildStopDecision(frame, reference_line_info, &signal_light)) {
has_stop = true;
signal_debug->set_is_stop_wall_created(true);
}
}
// 设置交叉口区域,以及是否有权力通行,停车表明无法通行。
if (has_stop) {
reference_line_info->SetJunctionRightOfWay(signal_light.start_s,
false); // not protected
} else {
reference_line_info->SetJunctionRightOfWay(signal_light.start_s, true);
// is protected
}
}3.11 停车情况处理(STOP_SIGN)
停车情况相对来说比较复杂,根据代码将停车分为:寻找下一个最近的停车信号,决策处理。
寻找下一个停车点比较简单,由函数FindNextStopSign完成,这里直接跳过;接下来分析决策部分,可以分为以下几步:
获取等待车辆列表--由函数GetWatchVehicles完成;
这个过程其实就是获取无人车前方的等待车辆,存储形式为:
typedef std::unordered_map<std::string, std::vector<std::string>> StopSignLaneVehicles;map中第一个string是车道id,第二个vector是这个车道上在无人车前方的等待车辆id。
整体的查询是直接在PlanningStatus.stop_sign(停车状态)中获取,第一次为空,后续不为空。
int StopSign::GetWatchVehicles(const StopSignInfo& stop_sign_info, StopSignLaneVehicles* watch_vehicles) {
watch_vehicles->clear();
StopSignStatus stop_sign_status = GetPlanningStatus()->stop_sign();
// 遍历所有的车道
for (int i = 0; i < stop_sign_status.lane_watch_vehicles_size(); ++i) {
auto lane_watch_vehicles = stop_sign_status.lane_watch_vehicles(i);
std::string associated_lane_id = lane_watch_vehicles.lane_id();
std::string s;
// 获取每个车道的等候车辆
for (int j = 0; j < lane_watch_vehicles.watch_vehicles_size(); ++j) {
std::string vehicle = lane_watch_vehicles.watch_vehicles(j);
s = s.empty() ? vehicle : s + "," + vehicle;
(*watch_vehicles)[associated_lane_id].push_back(vehicle);
}
}
return 0;
}检查与更新停车状态PlanningStatus.stop_sign--由函数ProcessStopStatus完成;
停车过程可以分为5个阶段:正常行驶DRIVE--开始停车STOP--等待缓冲状态WAIT--缓慢前进CREEP--彻底停车DONE。
更新停车状态。如果无人车距离最近一个停车区域过远,那么状态为正常行驶
// adjust status
double adc_front_edge_s = reference_line_info->AdcSlBoundary().end_s();
double stop_line_start_s = next_stop_sign_overlap_.start_s;
if (stop_line_start_s - adc_front_edge_s > // max_valid_stop_distance: 3.5m
config_.stop_sign().max_valid_stop_distance()) {
stop_status_ = StopSignStatus::DRIVE;
}如果停车状态是正常行驶DRIVE。
这种情况下,如果车辆速度很大,或者与停车区域距离过远,则继续设置为行驶DRIVE;反之就进入停车状态STOP。状态检查由CheckADCkStop完成。
如果停车状态是开始停车STOP。
这种情况下,如果从开始停车到当前经历的等待时间没有超过阈值stop_duration(默认1s),继续保持STOP状态;反之,如果前方等待车辆不为空,那么就进入下一阶段WAIT缓冲阶段;如果前方车辆为空,那么可以直接进入到缓慢前进CREEP状态或者停车完毕状态。
如果停车状态是等待缓冲WAIT
这种情况下,如果等待时间没有超过一个阈值wait_timeout(默认8s)或者前方存在等待车辆,继续保持等待状态;反之可以进入到缓慢前进或者停车完毕状态。
如果停车状态是缓慢前进CREEP
这种情况下,只需要检查无人车车头和停车区域的距离,如果大于某个值那么说明可以继续缓慢前进,保持状态不变;反之就可以完全停车了。
更新前方等待车辆;
a.当前状态是DRIVE,那么需要将障碍物都加入到前方等待车辆列表中,因为这些障碍物到时候都会排在无人车前方等待;
if (stop_status_ == StopSignStatus::DRIVE) {
for (const auto* path_obstacle : path_decision->path_obstacles().Items()) {
// add to watch_vehicles if adc is still proceeding to stop sign
AddWatchVehicle(*path_obstacle, &watch_vehicles);
}
}b.如果无人车当前状态是等待或者停车,删除部分排队等待车辆--RemoveWatchVehicle函数完成;
这种情况下,如果障碍物已经驶过停车区域,那么将其删除;否则继续保留。
double stop_line_end_s = over_lap_info->lane_overlap_info().end_s();
double obstacle_end_s = obstacle_s + perception_obstacle.length() / 2;
double distance_pass_stop_line = obstacle_end_s - stop_line_end_s;
// 如果障碍物已经驶过停车区一定距离,可以将障碍物从等待车辆中删除。
if (distance_pass_stop_line > config_.stop_sign().min_pass_s_distance() && !is_path_cross) {
erase = true;
} else {
// passes associated lane (in junction)
if (!is_path_cross) {
erase = true;
}
}
// check if obstacle stops
if (erase) {
for (StopSignLaneVehicles::iterator it = watch_vehicles->begin();
it != watch_vehicles->end(); ++it) {
std::vector<std::string>& vehicles = it->second;
vehicles.erase(std::remove(vehicles.begin(), vehicles.end(), obstacle_id), vehicles.end());
}
}将剩下来的障碍物重新组成一个新的等待队列--ClearWatchVehicle函数完成。
for (StopSignLaneVehicles::iterator it = watch_vehicles->begin();
it != watch_vehicles->end();
/*no increment*/) {
std::vector<std::string>& vehicle_ids = it->second;
// clean obstacles not in current perception
for (auto obstacle_it = vehicle_ids.begin(); obstacle_it != vehicle_ids.end();) {
// 如果新的队列中已经不存在该障碍物了,那么直接将障碍物从这条车道中删除
if (obstacle_ids.count(*obstacle_it) == 0) {
obstacle_it = vehicle_ids.erase(obstacle_it);
} else {
++obstacle_it;
}
}
if (vehicle_ids.empty()) { // 如果这整条车道上都不存在等待车辆了,直接把这条车道删除
watch_vehicles->erase(it++);
} else {
++it;
}
}更新车辆状态PlanningStatus.stop_sign。这部分由函数UpdateWatchVehicles完成,主要是将新的等待车辆队列更新至stop_sign。
int StopSign::UpdateWatchVehicles(StopSignLaneVehicles* watch_vehicles) {
auto* stop_sign_status = GetPlanningStatus()->mutable_stop_sign();
stop_sign_status->clear_lane_watch_vehicles();
for (auto it = watch_vehicles->begin(); it != watch_vehicles->end(); ++it) {
auto* lane_watch_vehicles = stop_sign_status->add_lane_watch_vehicles();
lane_watch_vehicles->set_lane_id(it->first);
std::string s;
for (size_t i = 0; i < it->second.size(); ++i) {
std::string vehicle = it->second[i];
s = s.empty() ? vehicle : s + "," + vehicle;
lane_watch_vehicles->add_watch_vehicles(vehicle);
}
}
return 0;
}c. 如果当前车辆状态是缓慢前进状态CREEP;
这种情况下,可以直接创建停车的标签。
3.12 横纵向Decision合并
最后总结一下,障碍物和路况对无人车的决策影响分为两类:一类是纵向影响LongitudinalDecision;一类是侧向影响LateralDecision。
纵向影响(LongitudinalDecision):
const std::unordered_map<ObjectDecisionType::ObjectTagCase, int, athObstacle::ObjectTagCaseHash>
PathObstacle::s_longitudinal_decision_safety_sorter_ = {
{ObjectDecisionType::kIgnore, 0}, // 忽略,优先级0
{ObjectDecisionType::kOvertake, 100}, // 超车,优先级100
{ObjectDecisionType::kFollow, 300}, // 跟随,优先级300
{ObjectDecisionType::kYield, 400}, // 减速,优先级400
{ObjectDecisionType::kStop, 500}}; // 停车,优先级500横向影响(LateralDecision):
const std::unordered_map<ObjectDecisionType::ObjectTagCase, int, PathObstacle::ObjectTagCaseHash>
PathObstacle::s_lateral_decision_safety_sorter_ = {
{ObjectDecisionType::kIgnore, 0}, // 忽略,优先级0
{ObjectDecisionType::kNudge, 100}, // 微调,优先级100
{ObjectDecisionType::kSidepass, 200}}; // 绕行,优先级200当有一个障碍物多次触发无人车决策时该怎么办?纵向决策合并,lhs为第一次决策,rhs为第二次决策,如何合并两次决策?
ObjectDecisionType PathObstacle::MergeLongitudinalDecision(
const ObjectDecisionType& lhs, const ObjectDecisionType& rhs) {
if (lhs.object_tag_case() == ObjectDecisionType::OBJECT_TAG_NOT_SET) {
return rhs;
}
if (rhs.object_tag_case() == ObjectDecisionType::OBJECT_TAG_NOT_SET) {
return lhs;
}
const auto lhs_val =
FindOrDie(s_longitudinal_decision_safety_sorter_, lhs.object_tag_case());
const auto rhs_val =
FindOrDie(s_longitudinal_decision_safety_sorter_, rhs.object_tag_case());
if (lhs_val < rhs_val) { // 优先选取优先级大的决策
return rhs;
} else if (lhs_val > rhs_val) {
return lhs;
} else {
if (lhs.has_ignore()) {
return rhs;
} else if (lhs.has_stop()) { // 如果优先级相同,都是停车,选取停车距离小的决策,防止安全事故
return lhs.stop().distance_s() < rhs.stop().distance_s() ? lhs : rhs;
} else if (lhs.has_yield()) { // 如果优先级相同,都是减速,选取减速距离小的决策,防止安全事故
return lhs.yield().distance_s() < rhs.yield().distance_s() ? lhs : rhs;
} else if (lhs.has_follow()) { // 如果优先级相同,都是跟随,选取跟随距离小的决策,防止安全事故
return lhs.follow().distance_s() < rhs.follow().distance_s() ? lhs : rhs;
} else if (lhs.has_overtake()) { // 如果优先级相同,都是超车,选取超车距离大的决策,防止安全事故
return lhs.overtake().distance_s() > rhs.overtake().distance_s() ? lhs : rhs;
} else {
DCHECK(false) << "Unknown decision";
}
}
return lhs; // stop compiler complaining
}横向决策合并。lhs为第一次决策,rhs为第二次决策,如何合并两次决策?
ObjectDecisionType PathObstacle::MergeLateralDecision(
const ObjectDecisionType& lhs, const ObjectDecisionType& rhs) {
if (lhs.object_tag_case() == ObjectDecisionType::OBJECT_TAG_NOT_SET) {
return rhs;
}
if (rhs.object_tag_case() == ObjectDecisionType::OBJECT_TAG_NOT_SET) {
return lhs;
}
const auto lhs_val =
FindOrDie(s_lateral_decision_safety_sorter_, lhs.object_tag_case());
const auto rhs_val =
FindOrDie(s_lateral_decision_safety_sorter_, rhs.object_tag_case());
if (lhs_val < rhs_val) { // 优先选取优先级大的决策
return rhs;
} else if (lhs_val > rhs_val) {
return lhs;
} else {
if (lhs.has_ignore() || lhs.has_sidepass()) {
return rhs;
} else if (lhs.has_nudge()) { // 如果优先级相同,都是微调,选取侧向微调大的决策
return std::fabs(lhs.nudge().distance_l()) >
std::fabs(rhs.nudge().distance_l())
? lhs
: rhs;
}
}
return lhs;
}
【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、硬件配置、AI求职交流等方向;
添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称
最后
以上就是飘逸羽毛最近收集整理的关于阿波罗 | 障碍物预测轨迹&参考线&交通规则融合1、障碍物信息的获取(Lagged Prediction)2. 障碍物轨迹与参考线融合3. 根据交通规则进行障碍物Decision的全部内容,更多相关阿波罗内容请搜索靠谱客的其他文章。








发表评论 取消回复