曲率及曲率约束
自动驾驶(七十三)---------离散点计算曲率_一实相印的博客-CSDN博客_三点计算曲率
离散点(离散序列)曲率计算那点事_笨比master的博客-CSDN博客_离散点曲率
坐标转换
Apollo项目坐标系研究_知行合一2018的博客-CSDN博客_apollo 坐标系
Apollo项目导航模式下的坐标转换研究_知行合一2018的博客-CSDN博客_apollo坐标系转换
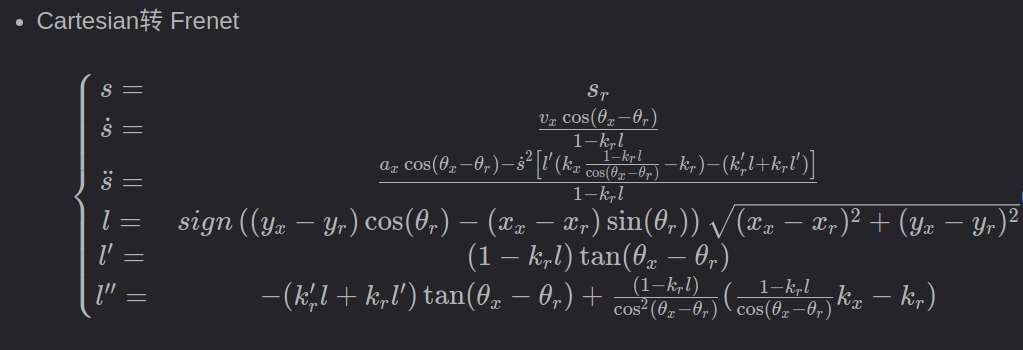
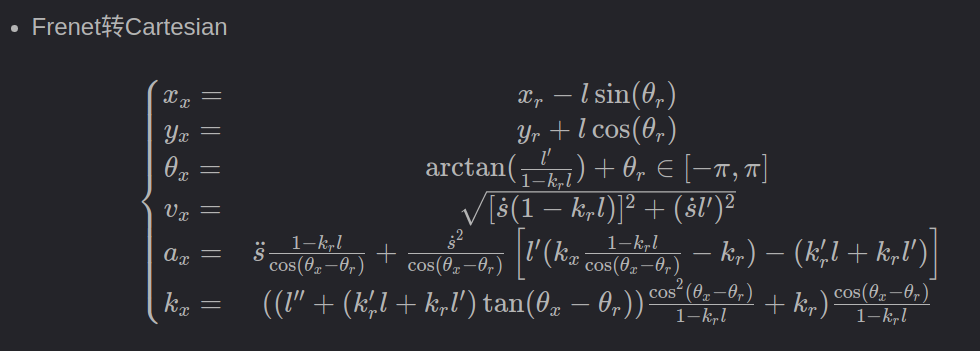
Frenet坐标系
Frenet坐标系与Cartesian坐标系互转_windSeS的博客-CSDN博客_cartesian坐标系
从Cartesian坐标系向Frenet坐标系下的转换中投影点的选取 - 知乎
Frenet坐标系相关知识系统学习_David-Chow的博客-CSDN博客_frenet坐标系
Apollo问答丨Apollo笛卡尔坐标系转Frenet坐标系的函数如何理解?
轨迹规划1:Frenet坐标转化公式推导_CK.Ren的博客-CSDN博客_frenet公式
需要先找到投影点,才能进行坐标转换:
轨迹拼接 Stitching
什么情况下需要进行轨迹拼接?
Apollo轨迹拼接模块(Trajectory Stitching)研读 - Challenging-Extraordinary
碰撞检测
Apollo中Lattice轨迹碰撞检测_王不二的路-CSDN博客_apollo 碰撞检测
凸包
Common math
【开发者讲堂】算法部分_vec2d和linesegment2d_哔哩哔哩_bilibili
【开发者讲堂】算法部分_common_math_哔哩哔哩_bilibili
Apollo common math模块解读 - Challenging-eXtraordinary
路径平滑(速度平滑)
梯度下降法实现路径平滑_linxigjs的博客-CSDN博客_梯度下降法平滑路径
最后
以上就是勤劳小熊猫最近收集整理的关于自动驾驶运动规划——基础知识汇总的全部内容,更多相关自动驾驶运动规划——基础知识汇总内容请搜索靠谱客的其他文章。








发表评论 取消回复