我是靠谱客的博主 超帅香氛,这篇文章主要介绍机器人轨迹规划中经常用到的曲线特性小结:Cn连续与Gn连续、Frenet标架、曲率和挠率1 光滑曲线,正则曲线2 参数连续性与参数曲线的几何连续性3 为什么机器人轨迹规划中更关心
G
n
G^{n}
Gn连续?参考文献,现在分享给大家,希望可以做个参考。
文章目录
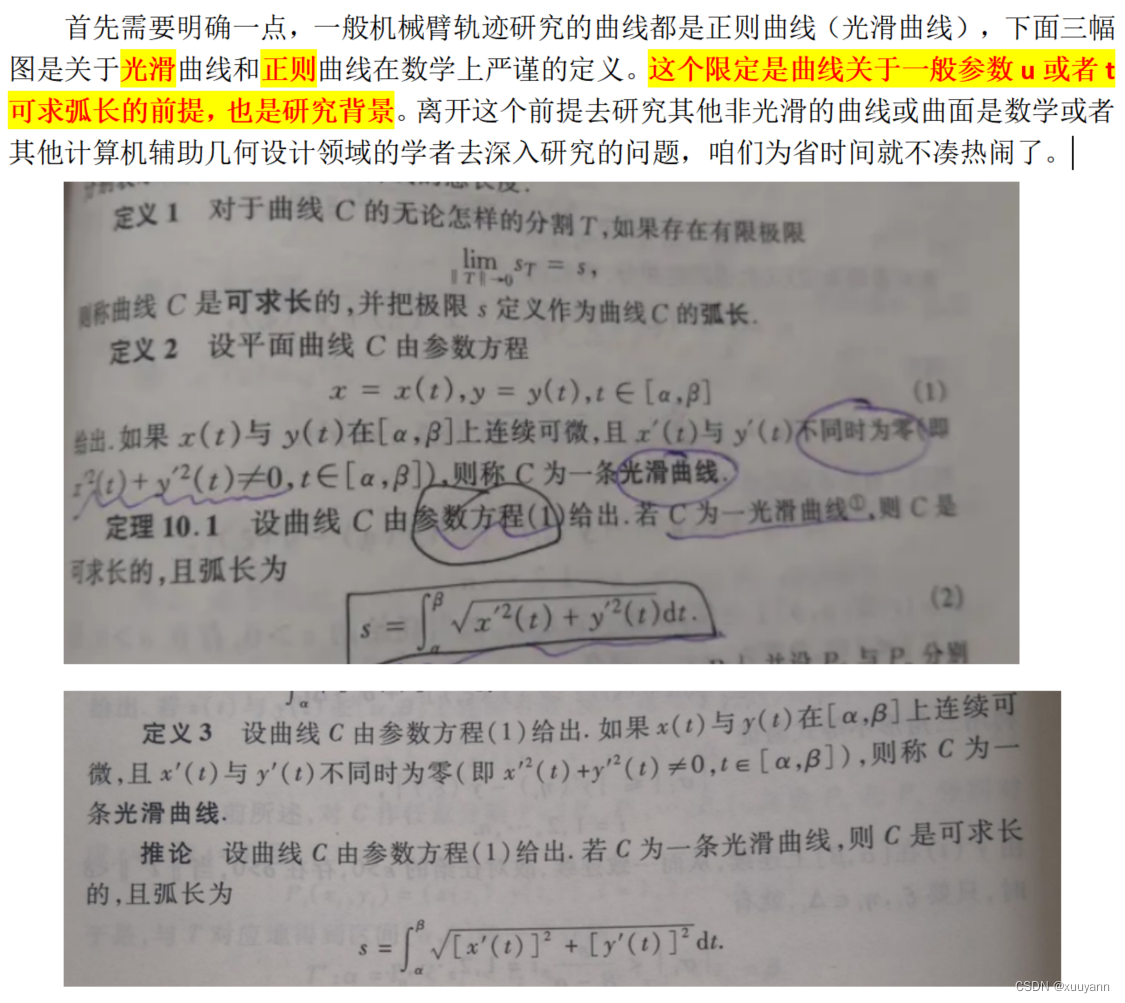
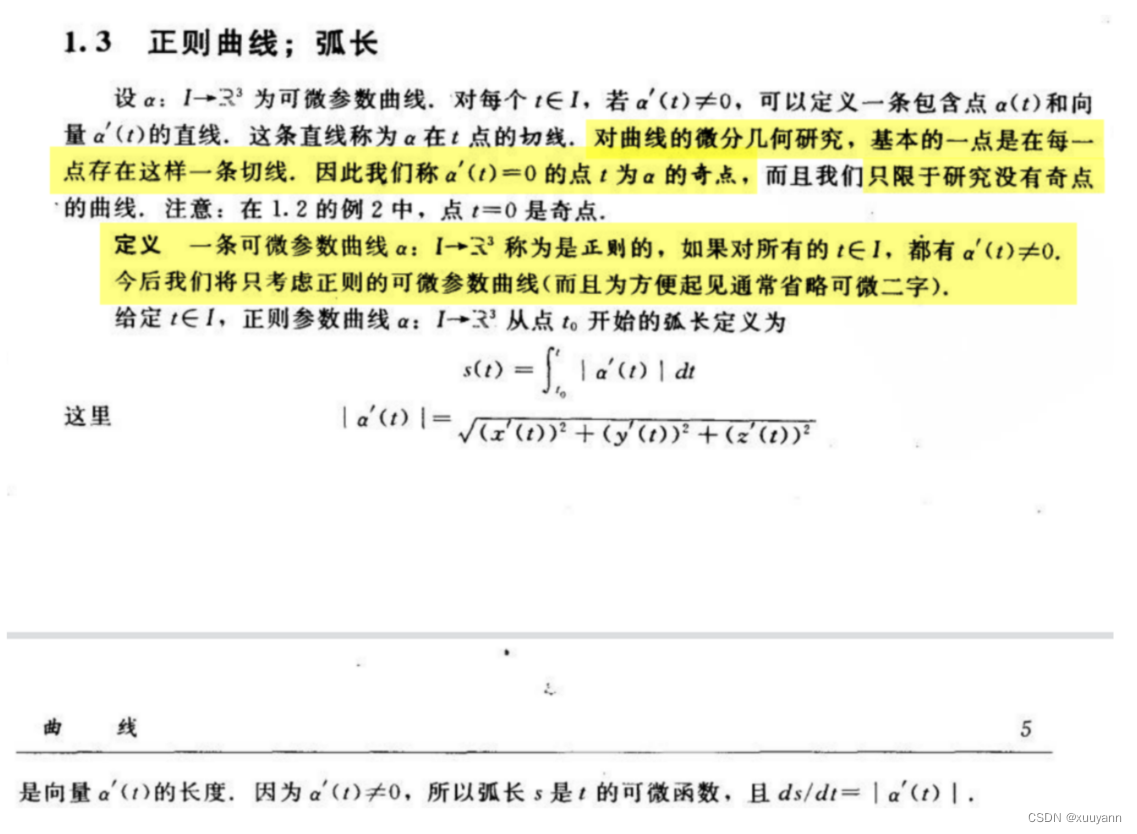
1 光滑曲线,正则曲线
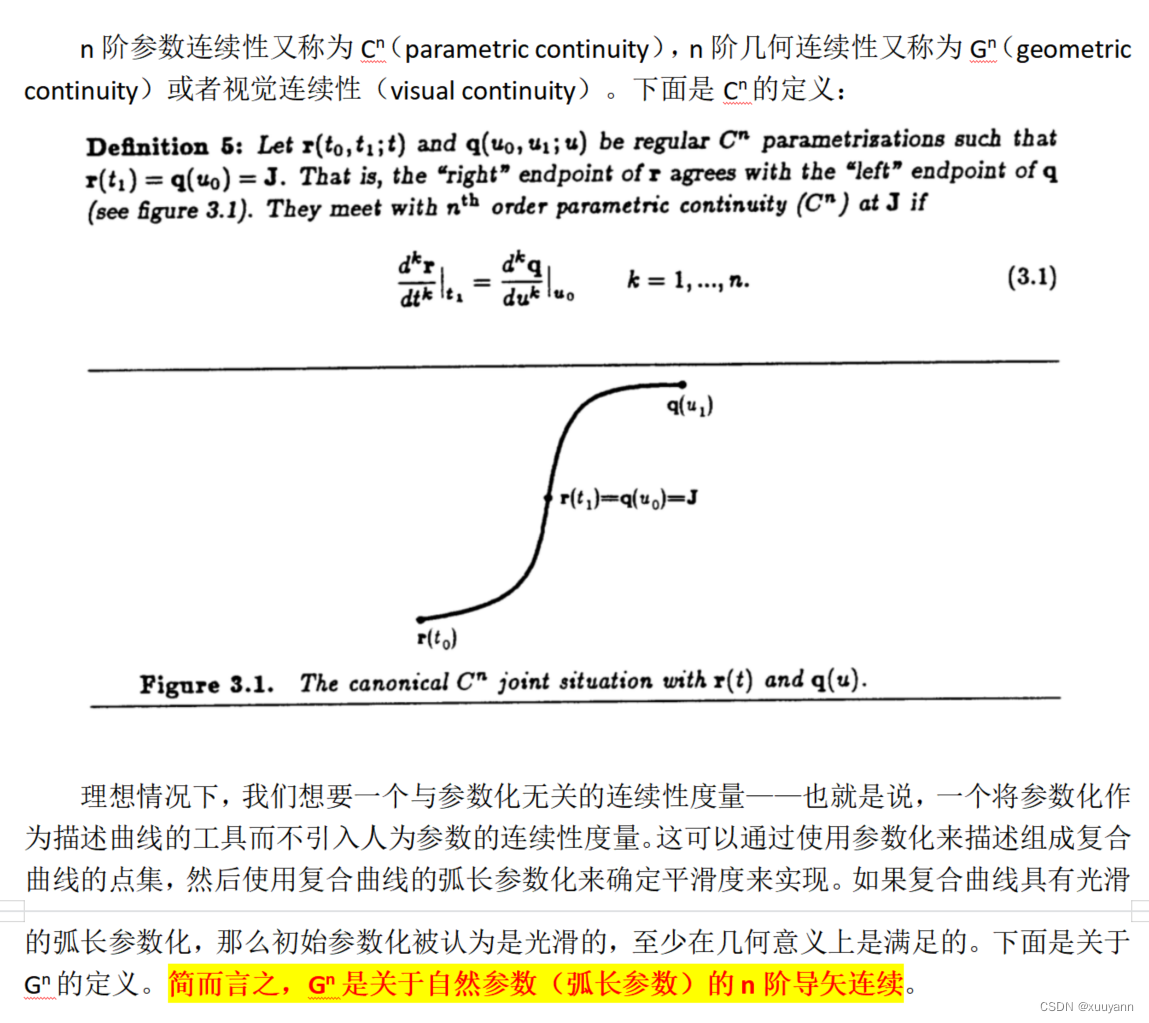
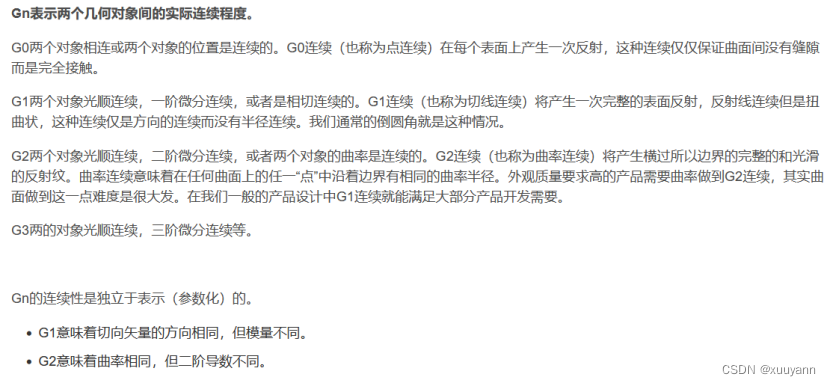
2 参数连续性与参数曲线的几何连续性

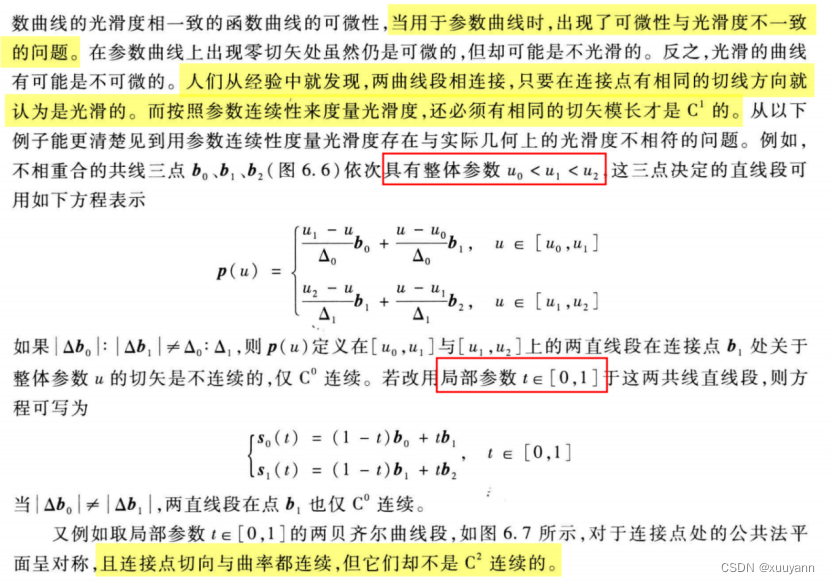
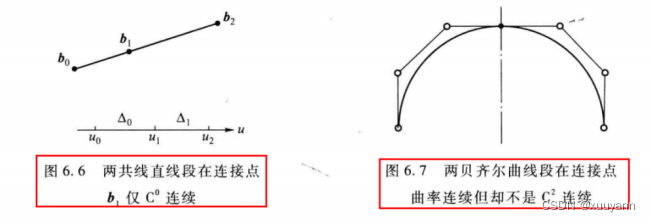
2.1 为什么要区分两种连续性?
2.2 Frenet标架、曲率、挠率
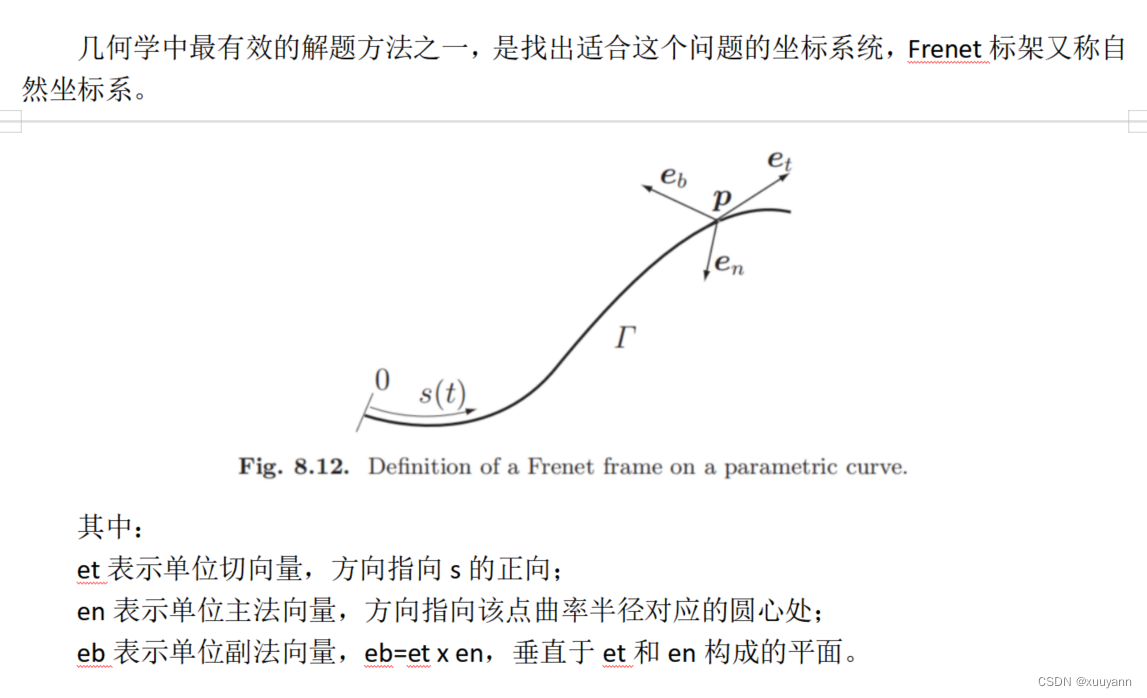
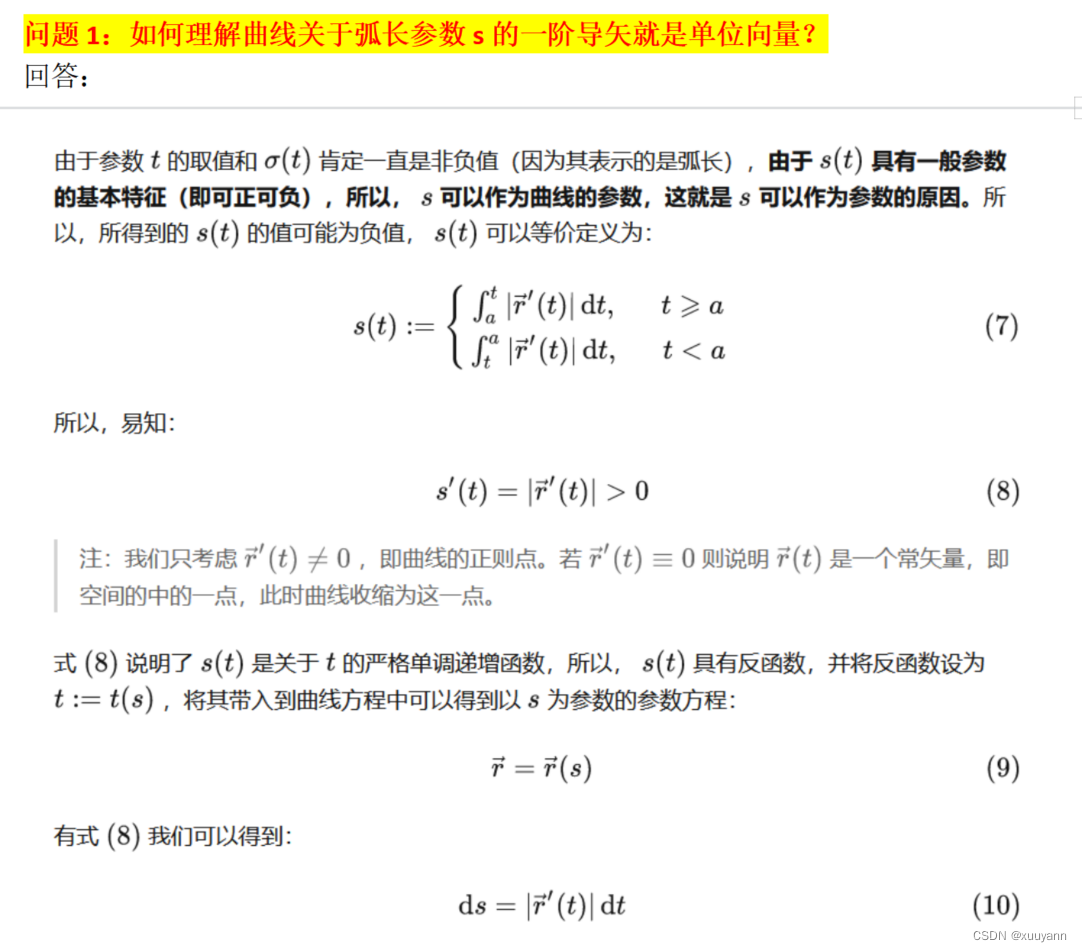
2.2.1 Frenet 标架
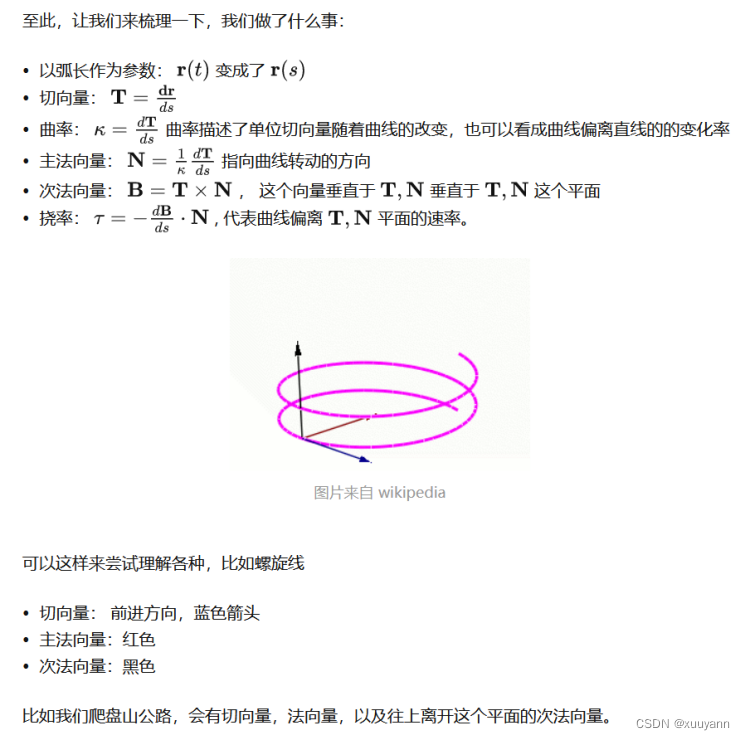
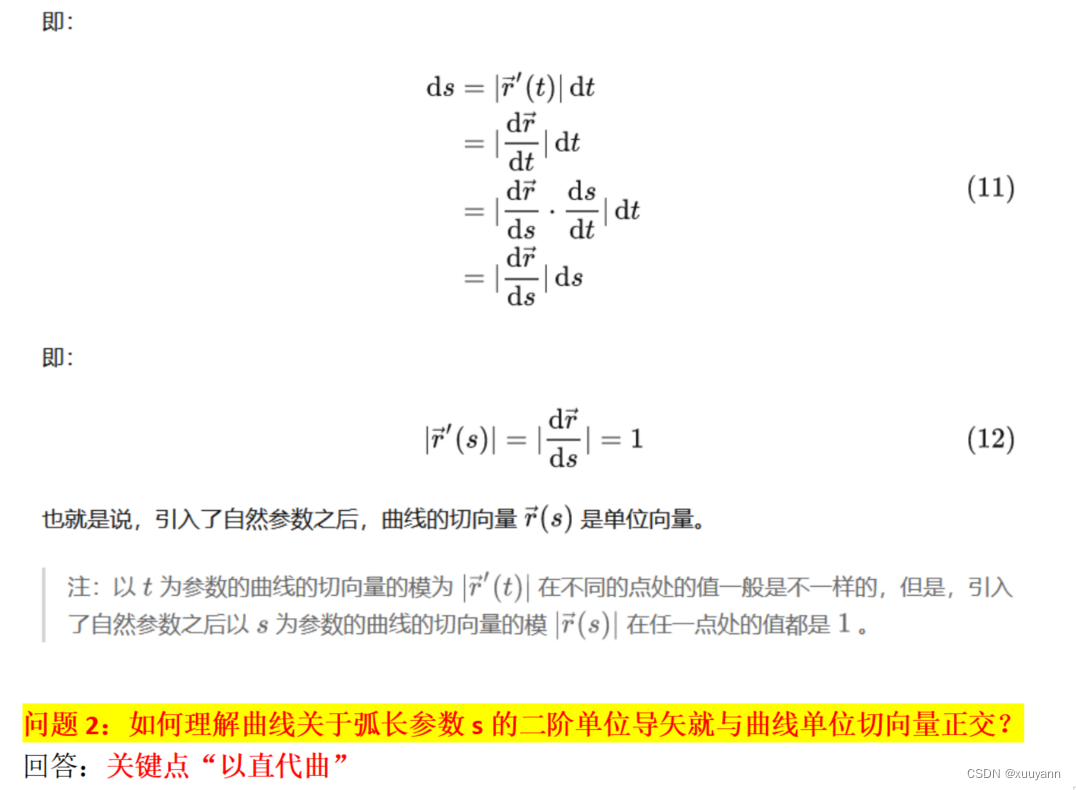
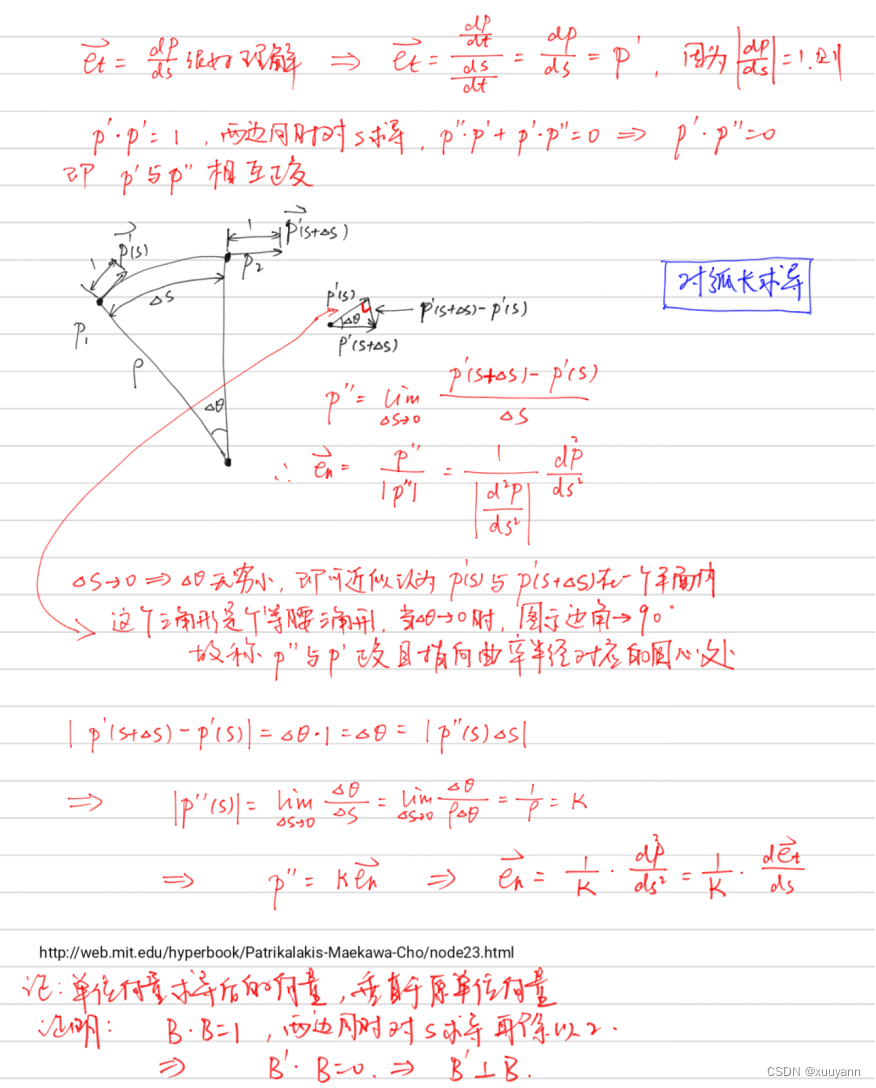
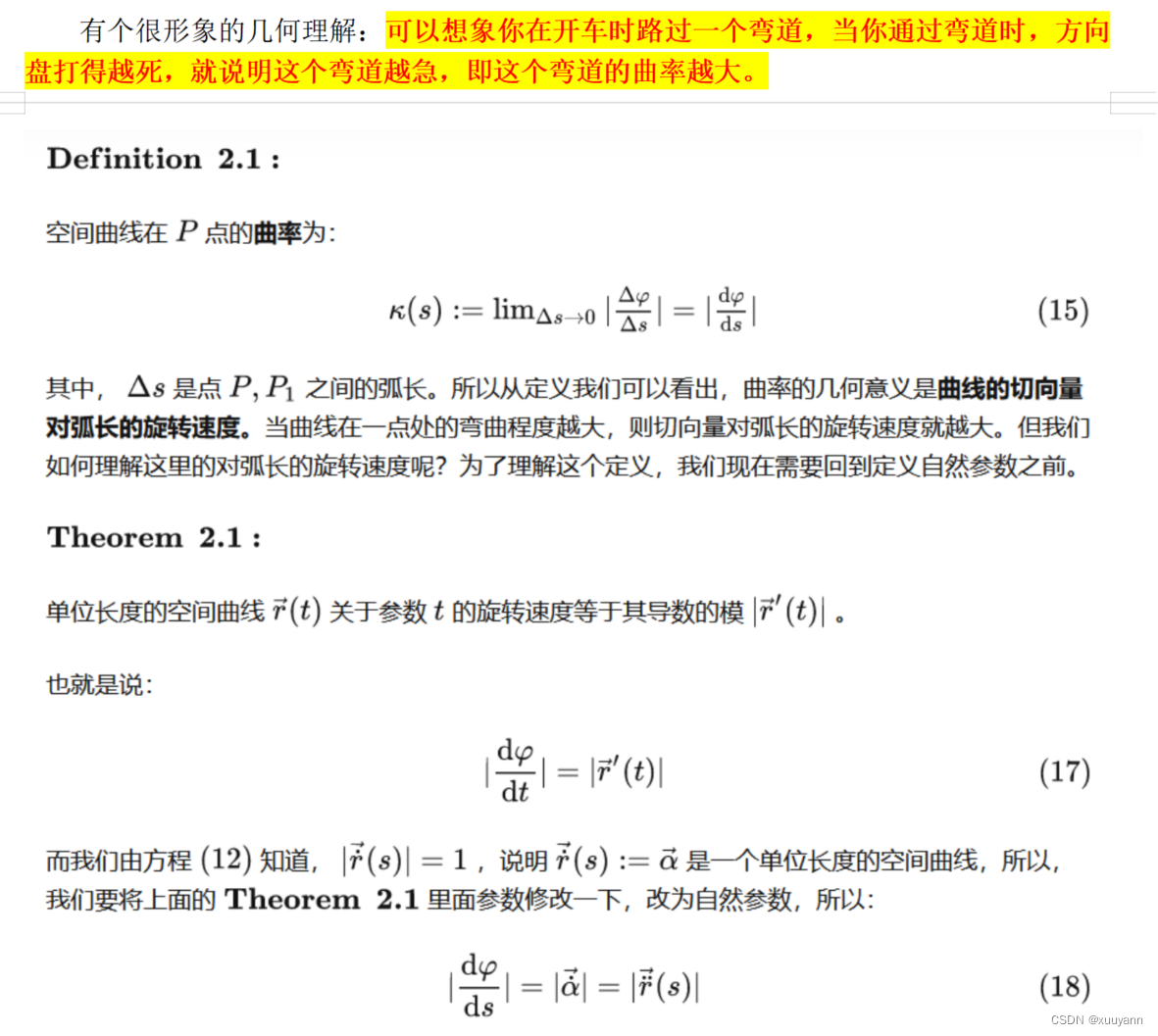
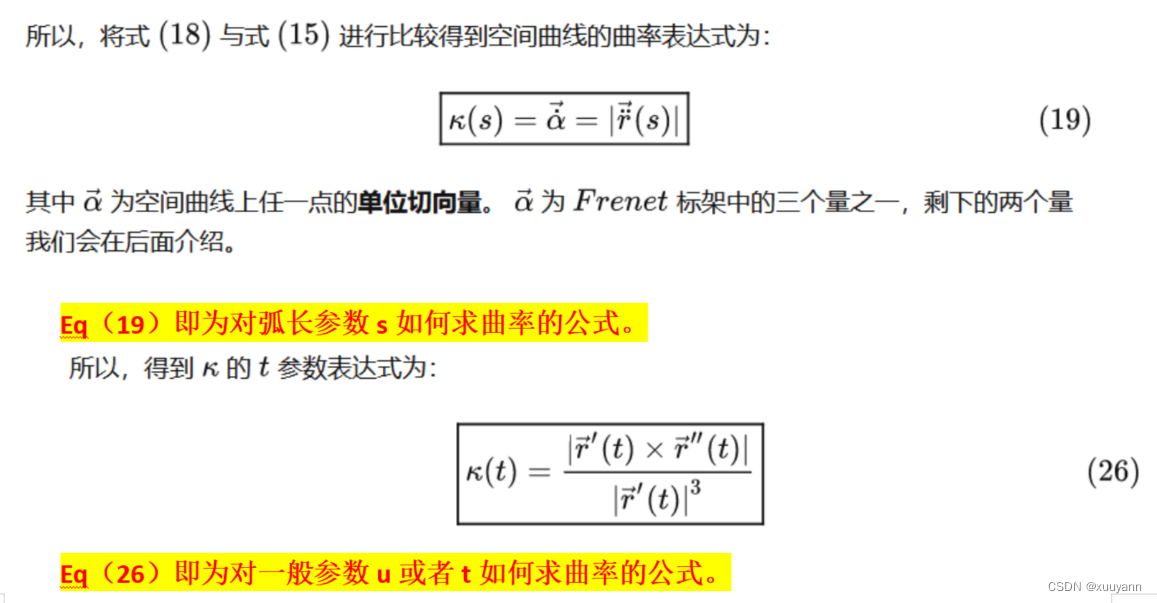
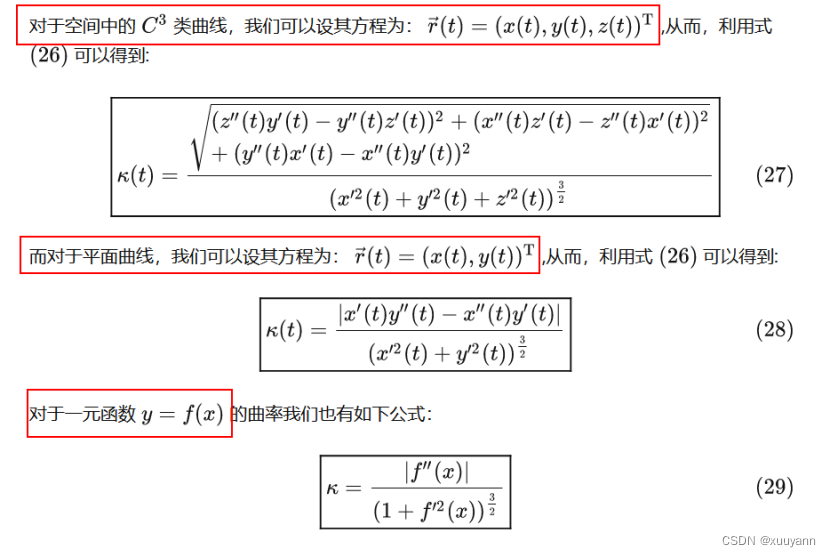
2.2.2 曲率
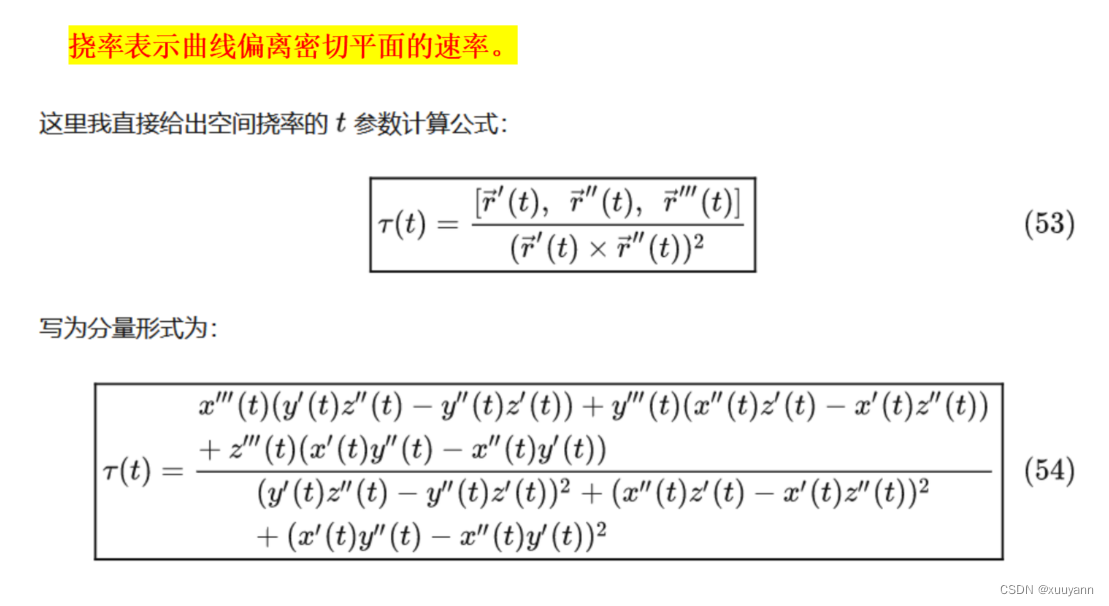
2.2.3 挠率
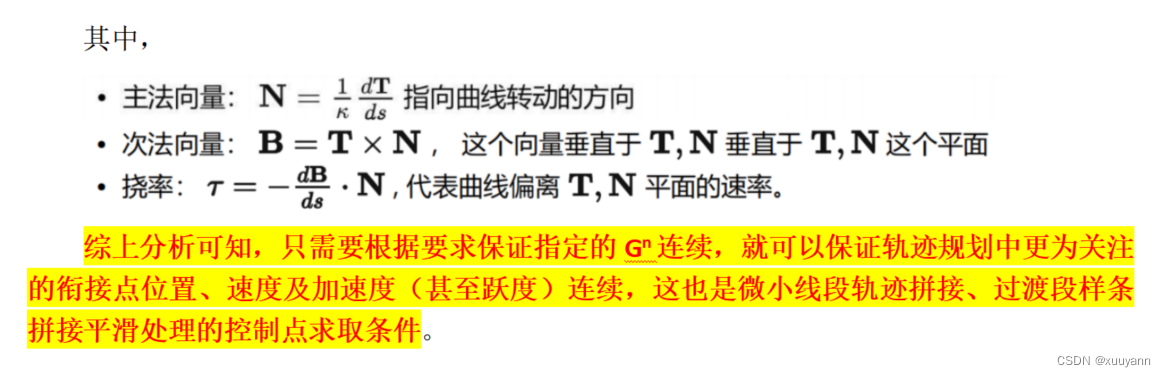
3 为什么机器人轨迹规划中更关心 G n G^{n} Gn连续?
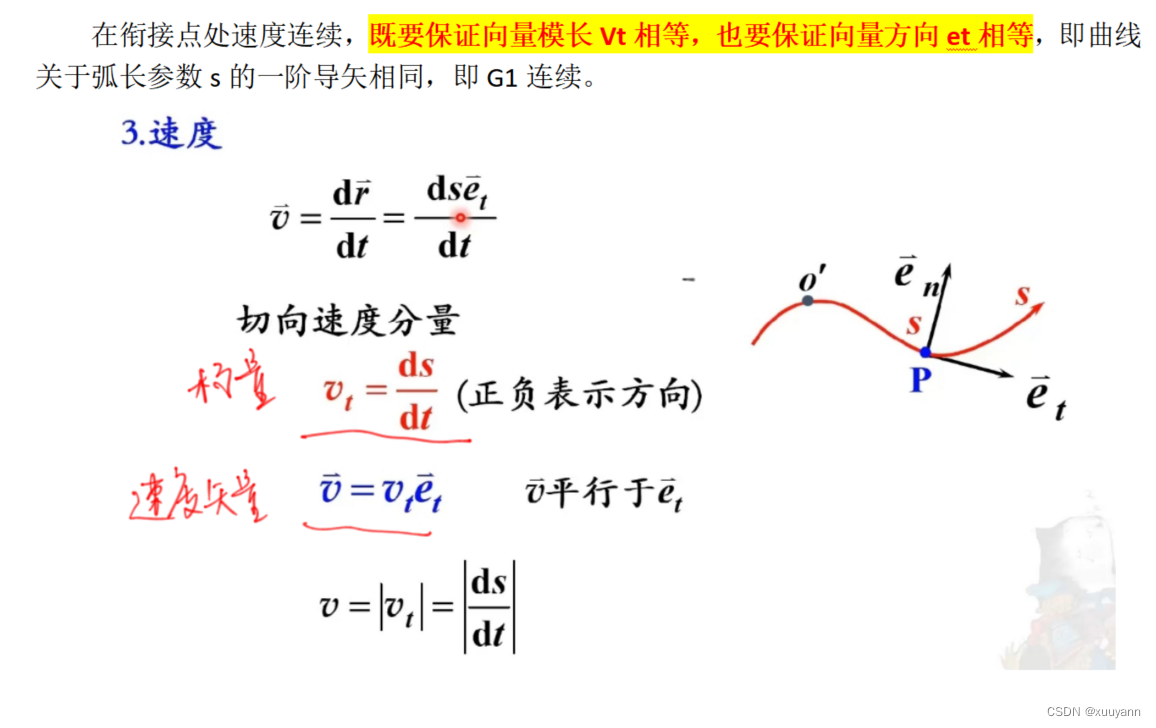
3.1 速度
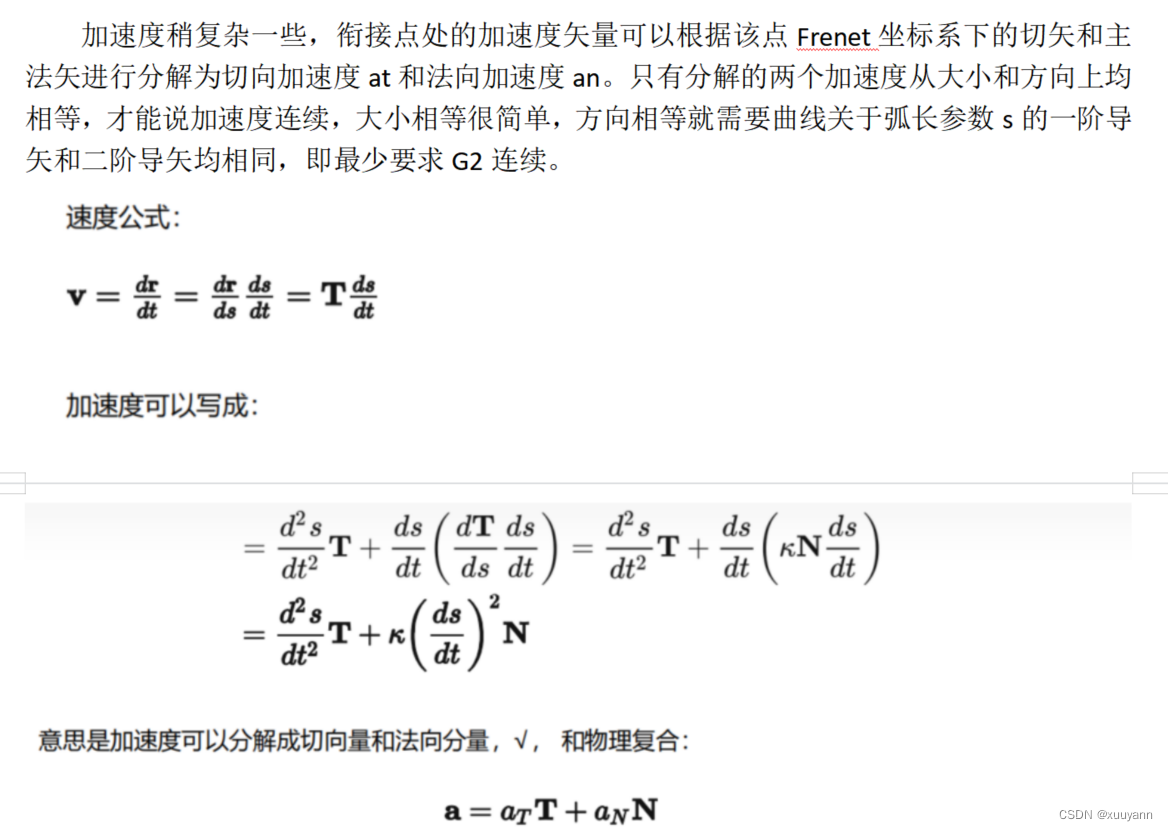
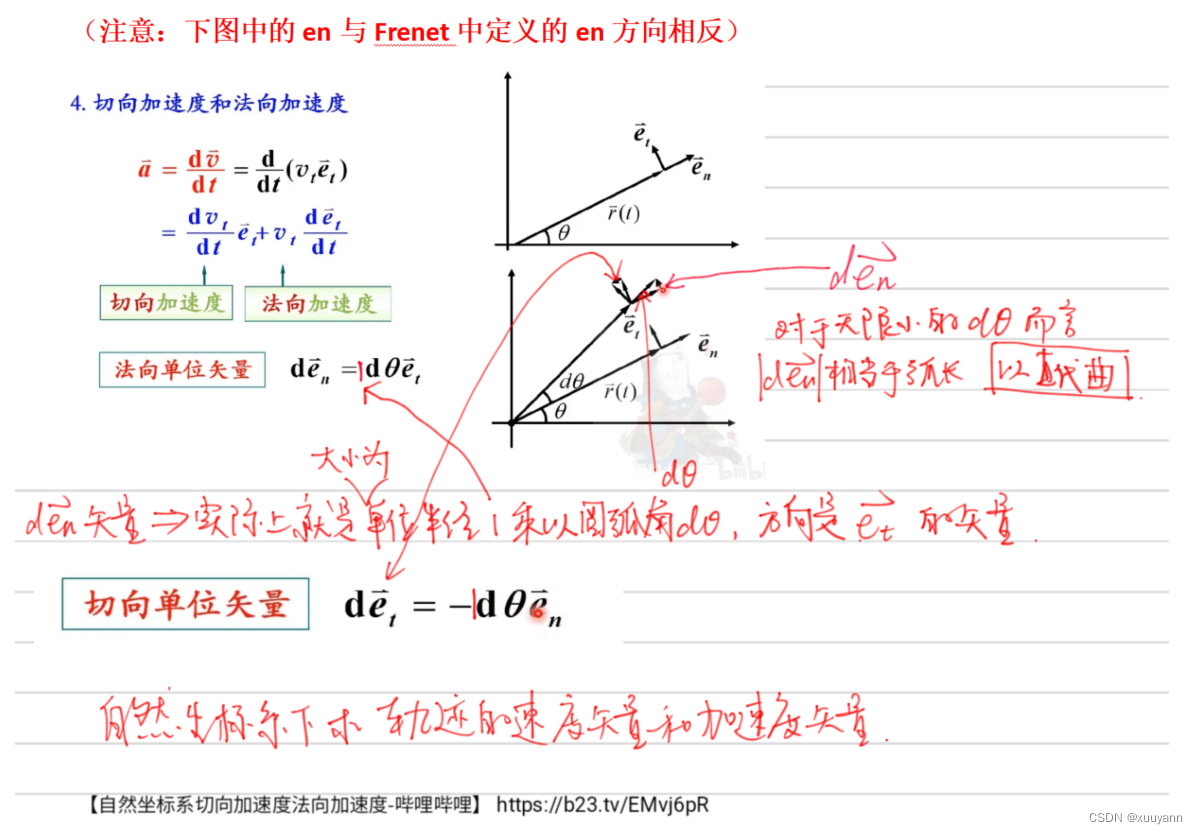
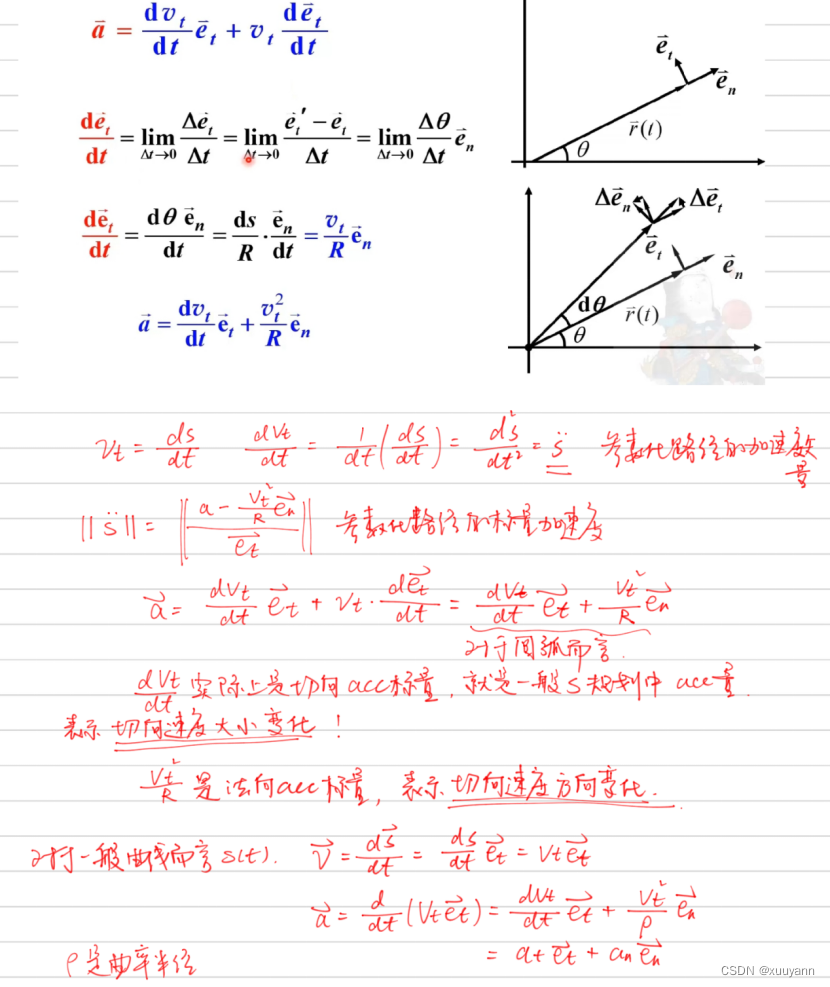
3.2 切向加速度和法向加速度
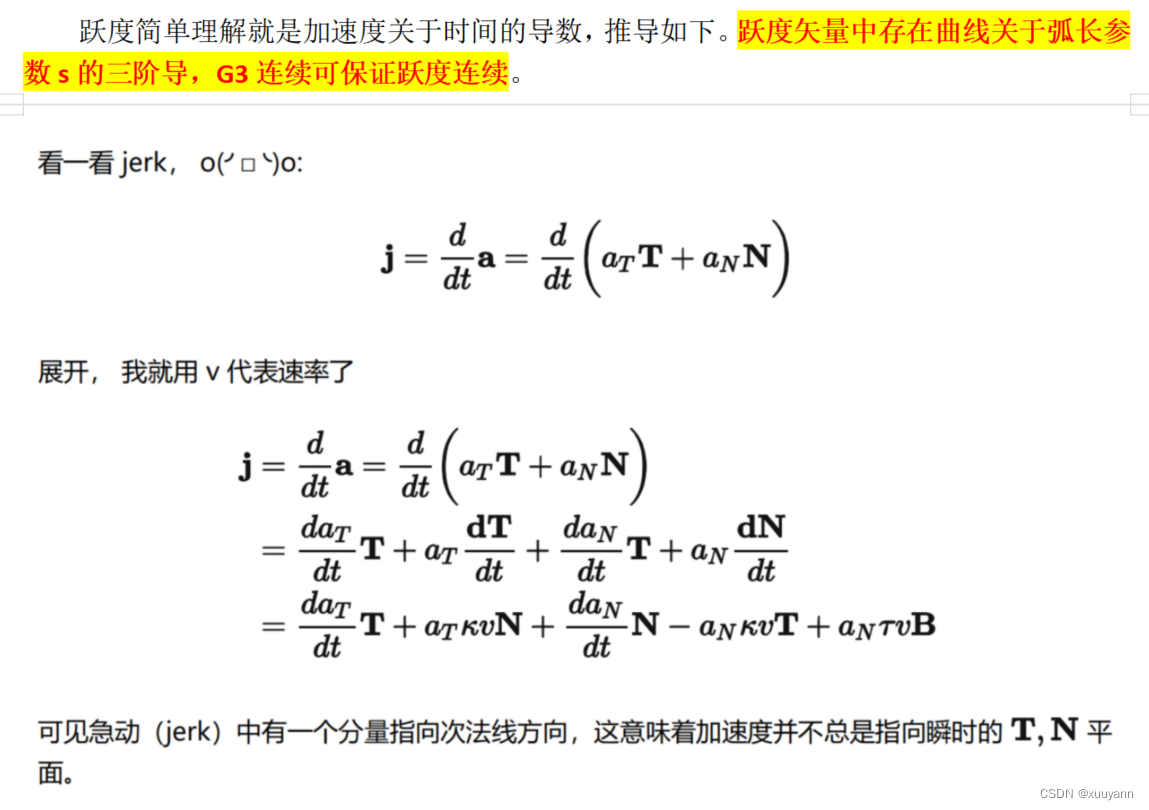
3.3 进阶理解跃度
参考文献
[1] 光滑曲线在数学上的定义是什么??
[2] 施法中. 计算机辅助几何设计与非均匀有理 B 样条[ M]. 北京 :高等教育出版社 ,2001.
[3] 描述曲线和曲面的光滑度
[4] Frenet 标架
[5] 什么是曲率?什么又是挠率?
[6] Barsky B A, DeRose T D. Geometric continuity of parametric curves[M]. San Francisco, CA: Computer Science Division, University of California, 1984.
[7] 找到了一个对于G连续性更加直观的表示
最后
以上就是超帅香氛最近收集整理的关于机器人轨迹规划中经常用到的曲线特性小结:Cn连续与Gn连续、Frenet标架、曲率和挠率1 光滑曲线,正则曲线2 参数连续性与参数曲线的几何连续性3 为什么机器人轨迹规划中更关心 G n G^{n} Gn连续?参考文献的全部内容,更多相关机器人轨迹规划中经常用到的曲线特性小结:Cn连续与Gn连续、Frenet标架、曲率和挠率1内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复