
 作者 /
Aimee
出品 /
焉知
作者 /
Aimee
出品 /
焉知
众所周知,ADAS系统的整个开发过程依靠感知、控制决策以及执行进行相关功能的定义及处理,其中,感知端是整个系统开发的前提。它关系着系统是否能够很好地处理实际环境信息,而这一过程往往依赖于车身周边环境传感器这一重要的先决条件。一般情况下,ADAS系统作为自动驾驶前身,也称为驾驶辅助系统,很难拥有像真正自动驾驶系统一样完整的传感测试系统,这本身也就会造成在探测过程中出现感知局限,比如很多情况下出现误探测和漏探测。本文将分别就传感器测量过程中需要分析理解的相关内容进行原理说明。
1、距离测量
根据ISO15622所知,标准的纵向控制函数需要目标检测的最小距离为 ,且该距离必须受限于
,且该距离必须受限于 ,其中dmin1为在车辆运行速度下要求的最小的间距,对于雷达探测而言即便是在较低速度下,其时距设置仍旧需要大于10m。在跟随距离低于10m的情况下,系统要么减速,要么提醒驾驶员立即接管。如果速度降到dmin0以下,则可以认为在距驾驶员如此小的距离之前,控制过程将被中断。对于靠近目标车辆的路口,情况同样如此,驾驶员将不再依靠ADAS系统功能,而是通过自己的制动操作解决这种情况。
,其中dmin1为在车辆运行速度下要求的最小的间距,对于雷达探测而言即便是在较低速度下,其时距设置仍旧需要大于10m。在跟随距离低于10m的情况下,系统要么减速,要么提醒驾驶员立即接管。如果速度降到dmin0以下,则可以认为在距驾驶员如此小的距离之前,控制过程将被中断。对于靠近目标车辆的路口,情况同样如此,驾驶员将不再依靠ADAS系统功能,而是通过自己的制动操作解决这种情况。
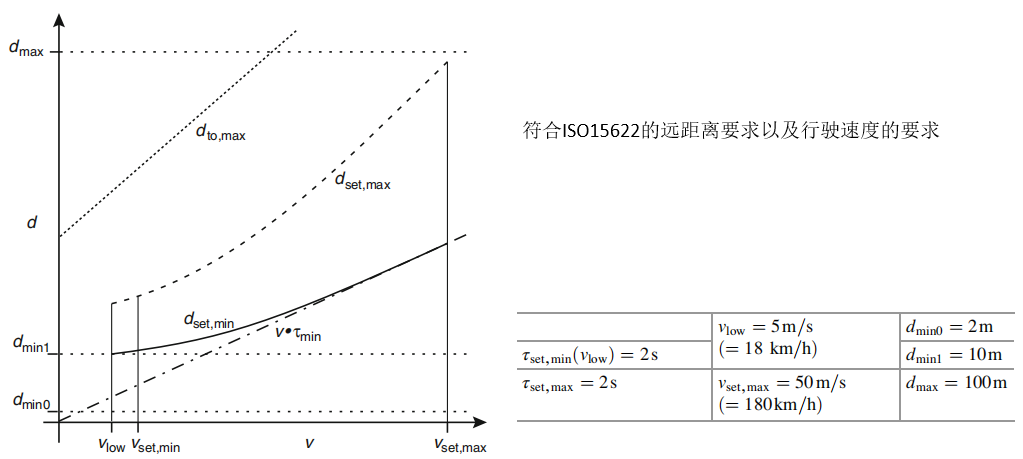
以上要求是最低要求,仅适用于固定式追逐,而一般情况下,距离越大目标选择越困难,在速度差很大的情况下,需要更大的制动距离。因此,在许多情况下,比如此时驾驶员期望超车,即使目标选择正常运行,减速反应在大于120 m的距离处也会表现为负。因为在换道开始之前,ACC减速反应会阻止超车。
如上图所示,由于系统对距离变化的响应适应性较弱,因此对距离测量的精度没有很高的要求。使用下面给出的控制环增益,1 m的距离误差derr(在0.1到2.0 Hz的频带内的有效值)会同时传递到最大振幅的加速度幅度中 ,在车辆跟随过程中,本车与前车的距离与其加速度幅度值应该保持在阈值为0.15 m/s2以下。因此,距离的增益误差可以容忍到5%的水平,而对驾驶员没有任何明显的影响。
,在车辆跟随过程中,本车与前车的距离与其加速度幅度值应该保持在阈值为0.15 m/s2以下。因此,距离的增益误差可以容忍到5%的水平,而对驾驶员没有任何明显的影响。
2、测量相对速度
相对速度的精度必须满足远高于距离的要求,因为相对速度的任何偏差都会导致加速度发生变化。速度的静态偏移将导致距离的稳定偏差,而1m/s的偏移会导致大约5m的距离偏差。相对速度vrel的速度波动 (0.1–2 Hz频带内的均方根值)仍然可以接受,因为随后产生的加速度波动仍低于驾驶员的反应灵敏度。过滤速度信号可以有效减少波动,相对误差高达5%时对于车辆跟随控制来说是没有问题的,因为制动器和动力传动系统的连续加速控制也随时根据该偏差进行调整适应,因此,控制设定点的相对偏差所引起的速度误差几乎不明显。无论物体是沿相同方向,静止还是沿相反方向移动,对相对速度的准确性提出了更大的挑战。对于此分类,相对速度vrel的公差必须小于2m/s或3%。相对误差可以用静止物体校准,因为它们的测量频率更高,因此被视为统计测量中的累积要素。
(0.1–2 Hz频带内的均方根值)仍然可以接受,因为随后产生的加速度波动仍低于驾驶员的反应灵敏度。过滤速度信号可以有效减少波动,相对误差高达5%时对于车辆跟随控制来说是没有问题的,因为制动器和动力传动系统的连续加速控制也随时根据该偏差进行调整适应,因此,控制设定点的相对偏差所引起的速度误差几乎不明显。无论物体是沿相同方向,静止还是沿相反方向移动,对相对速度的准确性提出了更大的挑战。对于此分类,相对速度vrel的公差必须小于2m/s或3%。相对误差可以用静止物体校准,因为它们的测量频率更高,因此被视为统计测量中的累积要素。
3、横向检测区域
横向检测范围的要求是源自于如下三个最初的假设:
1)跟随距离控制的最大时间间隔:τmax;
2)转弯的最大假定横向加速度:ay,max;
3)ADAS系统功能指定的最小曲线半径:Rmin;
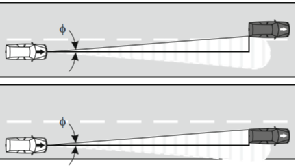
对于给定的曲率半径R>Rmin,最大转弯速度可由最大横向加速度确定。如果将其乘以时间间隔τmax,我们将获得所需的最大范围dmax(R)。然而,曲线表示为 ,该值在dmax处的偏移量与曲线半径和速度无关。此外,最大方位角ϕmax由R =Rmin处的最大偏移量ymax与最大范围dmax之比确定:
,该值在dmax处的偏移量与曲线半径和速度无关。此外,最大方位角ϕmax由R =Rmin处的最大偏移量ymax与最大范围dmax之比确定:
 ,
,
 根据观测到的驾驶行为,潜在基本横向加速度依赖于驾驶速度,这一结果依赖于弯道半径,速度越低其可经过的弯道半径越大,在ISO115622中表示出了相应的弯道半径值对应的最大横向加速度。
根据观测到的驾驶行为,潜在基本横向加速度依赖于驾驶速度,这一结果依赖于弯道半径,速度越低其可经过的弯道半径越大,在ISO115622中表示出了相应的弯道半径值对应的最大横向加速度。
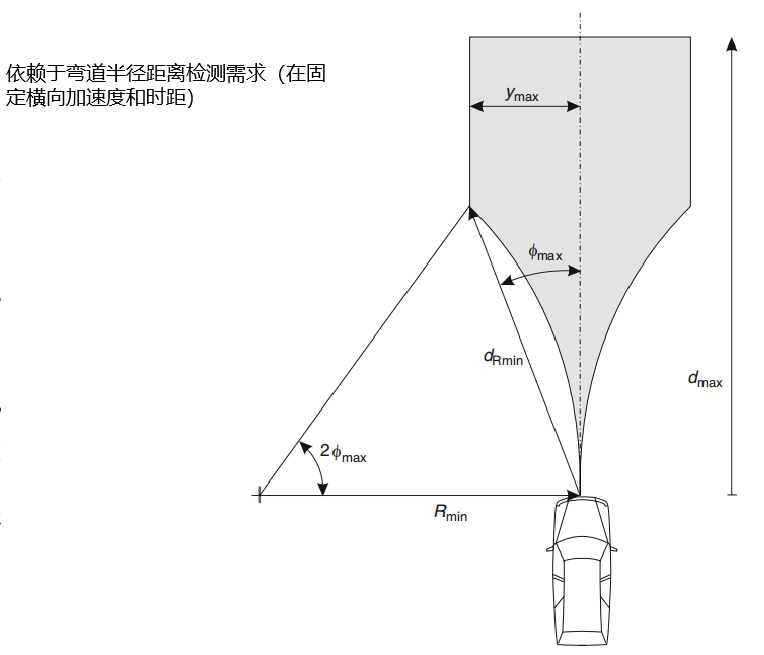
此外,对于最大的时距而言,张开视角FOV是由三种不同的横向加速度值假设来决定的。其中两个经验值是参考了一定的半径设置,在该半径下行驶车辆有一半的目标不会出现丢失。方位角范围太窄的传感器会丢失目标物体,一般情况下,辅助驾驶系统功能对于前方物体的方位角开度只需要满足16。(+-8。)即可实现主客观需求。继续增大该方位角度值,将对其功能探测无太大增益变化影响。针对自动驾驶功能而言,要求驾驶过程启停完全由系统控制,这就要求对于前方目标的探测则需要覆盖至100%,而依靠单摄像头或雷达传感器很难实现。当在拥挤的情况下,为了获得更好的视野,以便保证在低速下进行近距离和交错的距离控制,需要在车辆前方的8个区域覆盖全景摄像头检测到最多5-20 m的空间。
对于切入车辆目标而言,覆盖相邻车道也是有意义的(至少达到宽度的一半),因为从通常可以预期的最小切入距离上看,即便在非常低的速度下也需要大约2-4 m的检测距离,如果目标对象缓慢改变车道,自己需要的行车道不畅通,覆盖范围也将变得越来越困难。此外,可靠的角度确定非常重要,因为只有通过从角度值计算横向运动,以确保及早发现切入车辆,ADAS系统才能更好的响应切入的车辆。
4、垂直检测范围
垂直覆盖要求检测ADAS系统对所有相关物体(卡车,汽车,摩托车)进行检测。由于这些物体比ADAS传感器所安装的高度要低,因此,对其识别上容易造成漏识别。实际过程中可以在安装传感器的时候对传感器做一定程度的向下倾斜。垂直安装误差上的负面效应一般较小,因为纵向很少用于测量变量,比如激光雷达通过几条横线扫描环境,然而针对毫米波雷达来说,其纵向安装角度的偏离可能导致发射天线方向的改变,因此,尽量减少标定过程中的纵向误差也可以很好规避上述问题。
5、多目标检测
传感器前方可能出现多个目标,在可行驶区域中对这些目标进行检测区分的能力显得尤为重要,比如对本车道和相邻车道的车进行区分,区分点在于其速度、距离以及方位角,而一般的追踪方法是采用动态窗口,该窗口根据目标的运动情况和自车传感器状态进行实时调整。

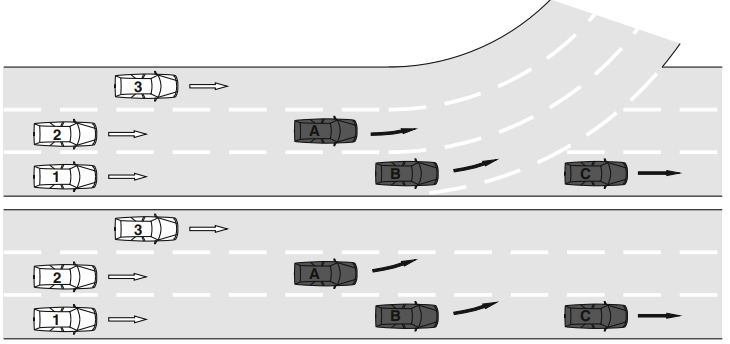
ADAS系统目标选择的重要性是不言而喻的,它关系到对自车的准确控制,比如对于弯道目标的探测上,自车由于传感器FOV是一个固定角度和距离的探测模式,故其生成的探测结果很可能将其视野范围内的所有目标都当成跟随目标,但实际上只有本车道的目标才是真正需要选择跟随的目标。
6、路径曲率计算
曲率K描述了车辆运动方向的变化,其与道路半径成倒数,车辆行驶轨迹的曲率由其搭载的传感器决定,并假设所有计算均在动态车辆限制范围之外使用,因此,它们不适用于打滑情况或存在明显的车轮打滑情况。如下将分别列举几种典型的道路曲率计算方法。
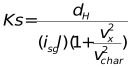
1)由方向盘角度计算的曲率
为了从方向盘角度δH计算曲率Ks,需要三个车辆参数:转向比isg,轴距l和由线性动态范围内的转向不足状态下的特征速度vchar。曲率Ks可以根据如下公式计算得出:
2)由横摆率计算的曲率
要从偏航率计算曲率KΨ,需要驱动速度vx,而忽略滑移角率,可采用如下图方式进行:

3)由横向加速度计算的曲率
根据横向加速度ay计算曲率Kay时也使用驱动速度vx:

4)根据车轮速度计算的曲率
对于来自车轮速度的曲率Kv,需要车轮速度的相对差Δv/ vx和轨道b的宽度。为了最小化驾驶影响,速度差Δv=(v1 -vr)和行驶速度vx=(vl +vr)/ vr 均由非驱动轴的速度确定。

尽管所有这些方法都可用于确定曲率,但它们在不同的操作条件下都具有不同的强度。它们在侧风,侧向道路倾斜度,车轮半径公差以及在不同速度范围内的灵敏度方面尤其不同。
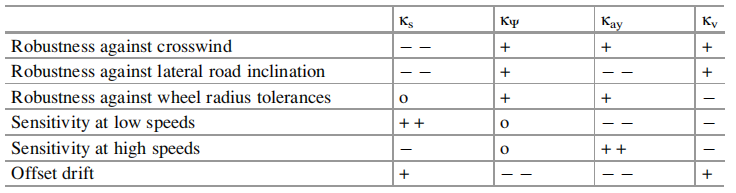
如上表所示,偏航率传感器的平均值提供了长距离的偏移量,利用偏航率计算的曲率是最佳的。如果将如上一些或所有信号进行优劣分析择优选择,使用统计平均方法,则可以实现信号质量的进一步改善。由于上述所有传感器都是制动系统的一部分,特别是在静止状态下,可以对偏航率进行偏移调整。
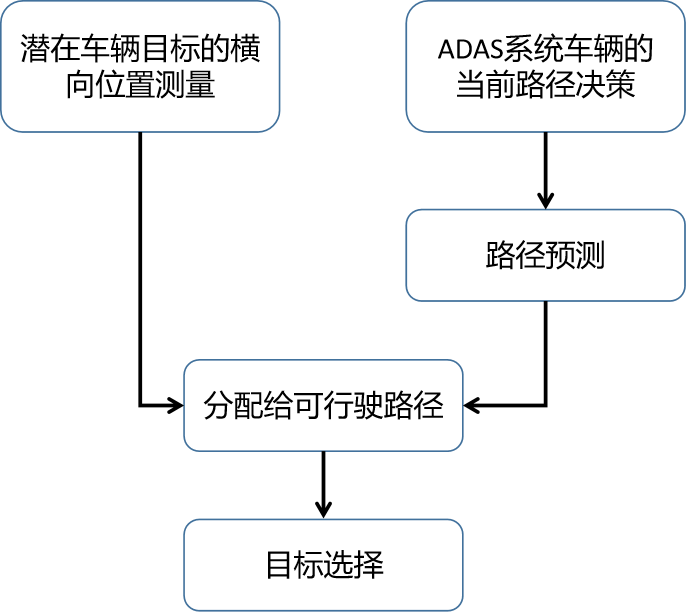
7、路径预测
为了预测未来的路径,系统需要知道车道的(未来)路径以及事实上的潜在跟随的目标车辆来对未来行驶车道的选择。由于在没有车辆对车辆的通讯(即V2V)情况下,就无法始终获得前车信息,因此使用了基本前提假设,这些假设采用了简化的假设。该假设是保留当前曲率,直到获得更多信息为止。这种方法无视弯道的出入,车道标志的变化以及驾驶员的转向错误。如果过去的车道标记分配可用,则假设对象和车辆将保留在他们的车道中。但是,如果切入或切出物体或驾驶员改变车道,则此设置无效,初始分配也无济于事。
折衷方法是将对象数据延迟一半的时间间隙,然后根据当时的路径曲率进行分配。这在弯道的起点和终点非常稳健,因为由于延迟,使用了对象与车辆之间的道路弯道,因此可以进行良好的分配。前方车辆的横向运动也可用于改善路径预测,因为在大多数情况下,这是道路即将弯曲的早期迹象。在路边使用静态对象确定曲率的方法在没有此类对象的情况下仅部分有用。GPS导航结合数字地图和其中存储的曲率信息,可提供用于路径预测的其他选项。不幸的是,这样的地图并不总是最新的,并且道路工程没有标记。
从摄像机图像处理中使用车道标记信息可以明显改善路径预测,但超过100 m的距离就不会有所改善,因为当今的标准相机像素大约等于0.05,该值在大约120 m时对应于10 cm的宽度,因此几乎不足以用于车道标记检测。另外,在黑暗中,尤其是在潮湿的道路上,大灯光束之外的基于图像的路径预测是不可能的。
前述算法被不同的主机厂以不同的方式和不同程度地使用,但是总的来说,它们将预测的轨迹曲率κpred作为起始值,然后可以根据距离推断轨迹。在正常打开角度的情况下,可以用抛物线近似值代替圆函数,由ADAS传感器检测到的物体的跨轨误差值yi,u可以与此轨迹相关,从而导致相对偏移:
 ,
,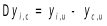
从如上公式可看出,预测曲率的误差yc,u随着物距d平方增加。然后,在高速下(vx>=150 km /h),曲率误差κerr小于10-4 / m是可以接受的,但在100 m时会引起误差Δyi,c,err(100m,150 km / h)=0.5 m。在140 m处,由于二次传播,误差增加了一倍。在低速(50 km / h)时,利用yawrate生成的曲率误差大约增加了两倍。在距离d=57m处(由于低速时最大目标选择距离的减小),其相应的误差 Δyi,c,err(57 m,50 km/h)= 0.5 m。
8、可行驶区域预测
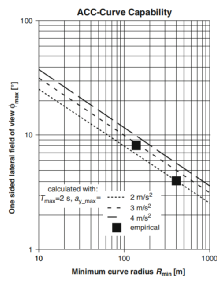
可行驶区域是专家经常使用的用于ADAS系统目标选择通道的术语。在最简单的形式中,它由宽度bcorr(不取决于距离)确定,以预定路径为中心线。最初,人们可能会将行车道宽度与车道宽度等同。但是,已经发现这种假设是不合适的。下图中的示例示出了存在这样的区域,其中仅基于所测量的横向位置不可能明确分配。
然而,由于不能假定所测得的物体的横向位置与物体的中心相对应,因此必须同时考虑物体的右边缘和左边缘。偏心行驶的车辆,无论是锁定目标车辆还是潜在目标车辆,都存在分配的进一步不确定性。因此,只有在测得的横向位置(无误差)位于预测路径中心(无误差)的1.2 m范围内时,才能确定分配给实际车道。仅当对象的位置距离路径中心至少2.3 m时,才能确定对象是否分配到相邻车道,这些值与3.5 m的车道宽度假设有关。
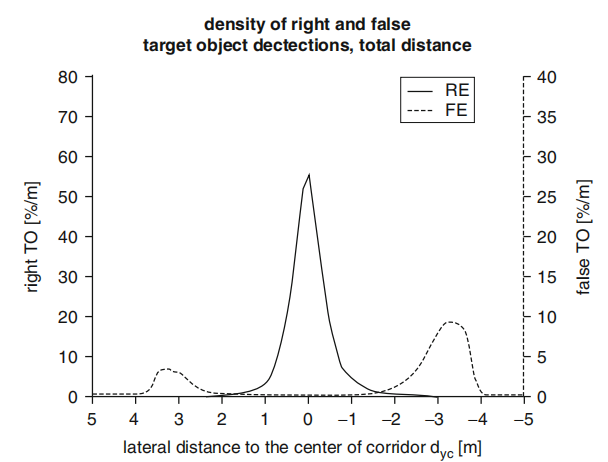
根据雷达传感器记录的统计数据(如下图所示),即使在3.5 m的车道宽度上也必须预期会出现一些误识别,但另一方面,在较窄的行驶通道中,可能会出现目标丢失。
实际中,可采取了三种措施来改善目标选择:其本质上取决于道路类型的可变行车道宽度,近似的行车道轮廓以及用于目标选择的局部和时间滞后功能。
对于可变的行车道宽度,有两项重要信息:左侧或右侧是否有相邻车道?如果不是这样,则选择区域在行车道的相应侧可能会非常宽(距相应侧大约2 m,即如果两侧没有相同行驶方向的行驶车道,则为4 m。关于相邻车道的存在的信息可以从对路边的静态目标的观察以及通过迎面而来的车辆来获得,由此,例如只能在一定时间延迟下检测到在单个方向上加宽到两个车道的变化。如果检测到相邻车道,例如,通过观察同一方向上车辆在自己车道外侧的横向位置,则可以使用横向位置的统计观察值来调整行车道,从而可以对涉及较窄车道的道路进行监控协调。
进一步的,标记为控制对象的对象被分配了比所有其他对象更宽的行驶通道。典型的差异在1 m左右,即左右两侧约50 cm。这样可以防止在相邻的车道上误识别物体,尤其是在变化的条件下(进入和驶出弯道,转向不均匀),同时在这些情况下仍可以使目标物体保持稳定。
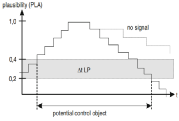
如上图所示,还使用了时间磁滞。与分配可靠性(LP,行驶通道概率)相比,在正LP的情况下,目标真实性(PLA)增加,高于上限(在这种情况下为0.4),则该对象将成为目标对象。目标真实性可能会增加到最大值(在这种情况下为1),并可能基于两个选项而降低:在没有检测到信号(无信号)和分配给相邻车道的情况下(负LP)。一旦低于下限阈值(在这种情况下为0.2),该对象便失去了可以被选择为目标对象的特性。
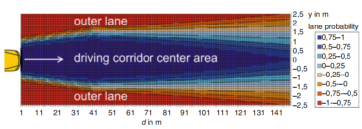
分配测量值LP可以大致映射。对象越远,车道分配之间的过渡就越不清晰。因此,必须考虑到位置确定和路径预测的误差随距离而增加的事实。另外,其他估计的不确定性可以动态地限制可行使区域的核心范围,例如弯道或行进方向不同的车辆(如上图)。
9、展望
目标选择的未来标准,除了车道分配之外,还可以使用其他条件。目标选择的最重要标准是物体速度,物体误识别的危险会随着距离的增加而大大增加。速度控制需要充分考虑到是否有迎面驶来的车辆,是否有静止车辆,继而是否需要使用单独的过滤器过滤这些对象。一种简单但非常有效的方法是根据行驶速度限制距离。
如果多个对象满足目标对象的标准,则以下决策标准将被单独考虑或组合考虑:
–最小纵向距离 –到路径中心的最小距离 –最小限定加速度此外,如果车道信息可用性提高(例如,来自高精地图辅助摄像头系统的信息),则时间和空间滞后可能会小得多,但是,只有根据情况才能实现切入和切出检测的显着改善分类,通过结合转向灯信号,需要实现对本车道内和相邻车道内的目标选择,从而导致行驶路径向转向灯方向移动,结合搜索和检测功能的数字地图还可以启用自适应可行使区域探测功能。

最后
以上就是甜美自行车最近收集整理的关于车轮轨迹原理_ADAS系统有效目标锁定及可行驶区域定义原理的全部内容,更多相关车轮轨迹原理_ADAS系统有效目标锁定及可行驶区域定义原理内容请搜索靠谱客的其他文章。








发表评论 取消回复