发现了一个好东西,国外一个支持水下机器人的开源仿真项目。本来把原文的大致内容翻译完想发到博客上的,但是考虑到 IEEE 的版权问题还是全删光了,这边就只是简单介绍一下这篇文章及其开源项目。原文链接如下:
UUV Simulator: A Gazebo-based package for underwater intervention and multi-robot simulation
由于现阶段的机器人开源仿真软件大多仅支持空中或者地面上的机器人系统,而对于水下机器人系统支持较少,因此本文的研究者研发了一套能够应用于水下机器人模拟的开源仿真平台,该平台能够在ROS和Gazebo上运行。
该uuv simulator来自于一个欧盟资助的SWARMs(Smart and Networking Underwater Robots in Cooperation Meshes)项目,面向开发应用于协调水下无人机进行相关作业的标准仿真框架,软件内部结构如下:
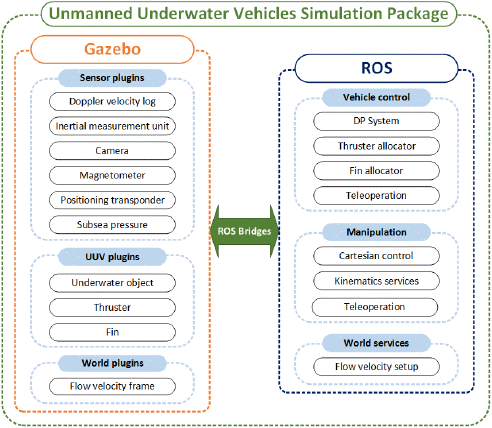
软件内部分为两部分:
- Gazebo内部能够通过一些插件定义水下传感器,机器人本体以及水下环境和环境载荷,这些插件不是基于ROS开发的但是可以通过API实现与ROS的通信及应用,同时也能够支持扩展它们以应用于其他中间件。
- 基于ROS开发了机器人的通信及控制系统,能够对仿真环境中的航行器进行操作。并且通过ROS Bridges实现与Gazebo的通信。
该模拟器能够建立自定义的推进器(官方配置以及用户自定义配置),各种适用水下的传感器,水动力及静水力的仿真和水下环境的搭建,并提供了已经搭建好的相关的海洋及水下世界的模型。支持搭载如机械手等的外部设备。
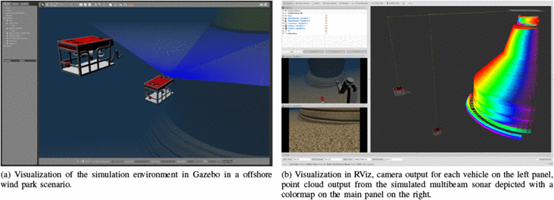
具体仿真及应用过程见原论文。以下为其中一个仿真示例:多机器人操作,探测获取点云,机械手实现作业。
最后
以上就是迷路板凳最近收集整理的关于UUV Simulator: Based on Gazebo的全部内容,更多相关UUV内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复