书上写的太难了,一天时间简单的了解了一下,不知道会不会影响以后的学习/(ㄒoㄒ)/~
- 一些知识
- 旋转、平移
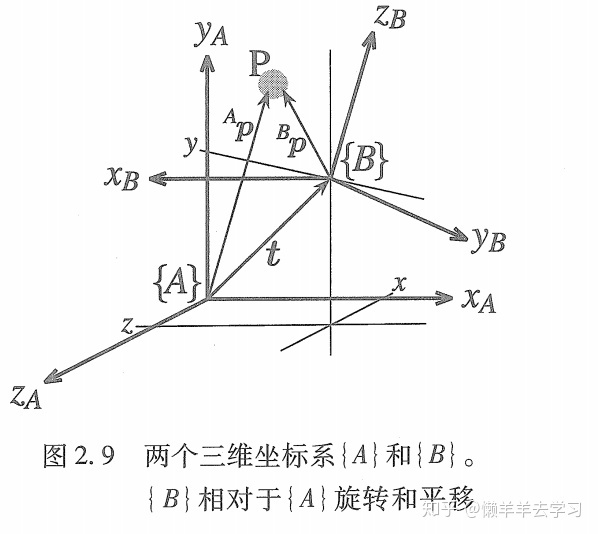
笛卡尔坐标系{A}通过向量t平移,再以某种方式旋转到坐标系{B},三维的旋转很复杂啊。
- 欧拉旋转定理
任何一个正交坐标系,都可以通过不超过三次相对于坐标轴的旋转,与另一任选直角坐标系方向相同,每连续两次旋转不能绕同一轴绕。
- 右手定则
拇指指向x,四指伸向y,四指弯曲的方向是z。
- 向量旋转方向
手握住向量,拇指指向向量方向,四指的方向就是旋转的正方向。
2. 3D变换矩阵
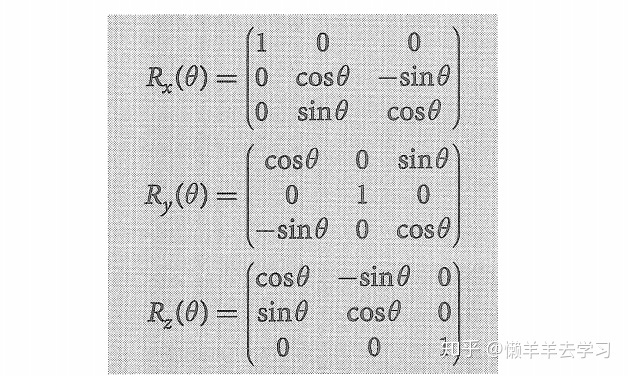
- 旋转
绕x,y,z轴旋转的正交矩阵为:
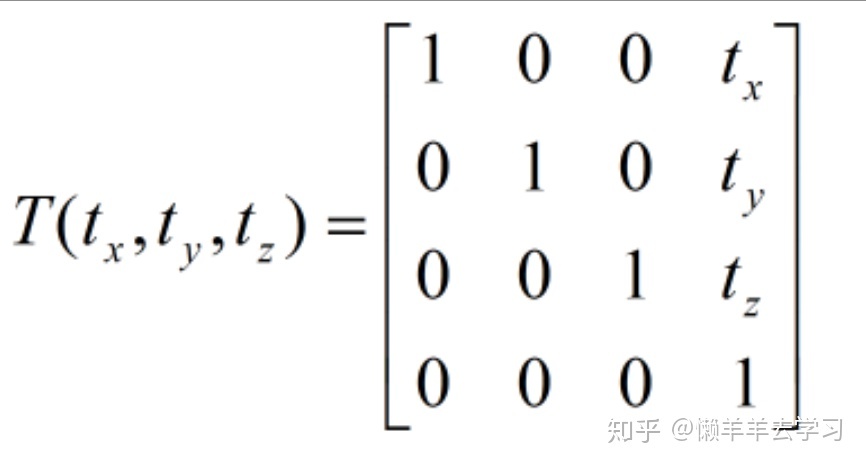
- 平移
平移的矩阵为:
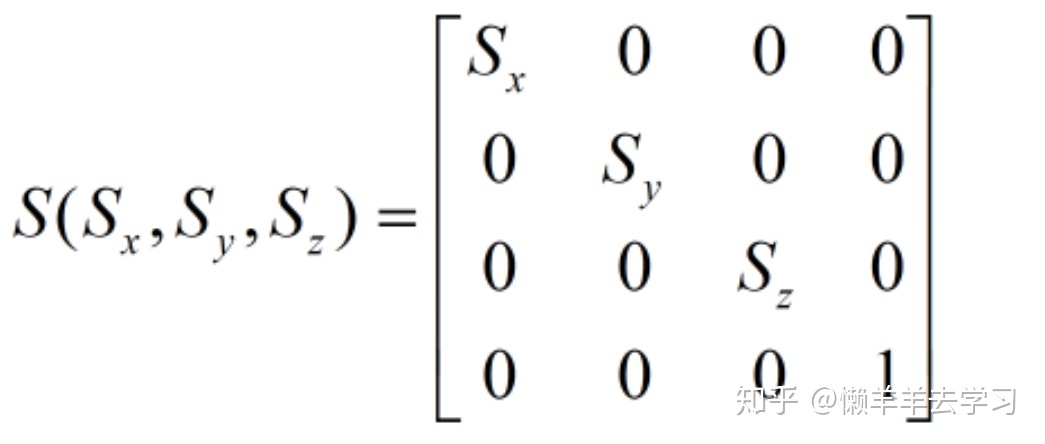
- 缩放
缩放的矩阵为:
3. 三角度表示法

书上介绍了两种:
- ZYZ序列
在航空、机械动力学,常用ZYZ序列,欧拉角表示为:
matlab中,给定欧拉角,可生成唯一的旋转矩阵;但旋转矩阵可能会对应多个欧拉角。
且,当
- XYZ序列
船舶、飞机、车辆中,常用XYZ序列,欧拉角表示为:
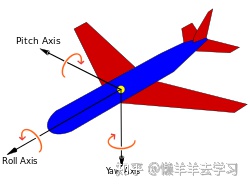
绕x轴旋转 -- roll 横滚角
绕y轴旋转 -- pitch 俯仰角
绕z轴旋转 -- yaw 偏航角
它也有奇异点:
所以,欧拉角不是完全安全的,当x,y,z轴有两个共线时,只有两个自由度,称为万向节死锁。用在车辆上比较好,飞机轮船会有危险。
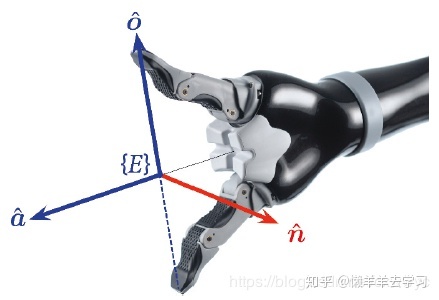
4.双向量表示法
用于关节臂式机器人,一般会在它的末端执行器上固联一个坐标系{
定义“姿态向量”与接近向量正交,穿过两指之间。记为:
双向量f表示法,大概就是这两个向量了,然后这俩再生成一个与他俩平面垂直的向量
5.轴-角法
一个姿态,总是可以找到某一固定轴
也可使用n罗德里格斯旋转方程,利用角度和向量找到旋转方程:

推导见b站。
6.四元数法
太复杂了,大概的定义是,用标量和三个虚轴表示向量,叫四元数。
最后
以上就是狂野糖豆最近收集整理的关于三维向量变化为角度_2.2 三维空间位姿描述的全部内容,更多相关三维向量变化为角度_2.2内容请搜索靠谱客的其他文章。


![[UE4][BluePrint] 钳制 PawnController 的 Rotation Yaw 和 Pitch](https://www.shuijiaxian.com/files_image/reation/bcimg19.png)





发表评论 取消回复