1.Xyz旋转方式转换为zyx旋转方式:
https://http://math.stackexchange.com/questions/3081609/given-tait-bryan-angles-x-y-z-intrinsic-how-can-i-get-tait-bryan-anmath.stackexchange.com/questions/3081609/given-tait-bryan-angles-x-y-z-intrinsic-how-can-i-get-tait-bryan-an
2.飞机为什么旋转需要翻滚roll?偏航yaw和俯仰pitch似乎可以到任何一个三维点
因为向心力
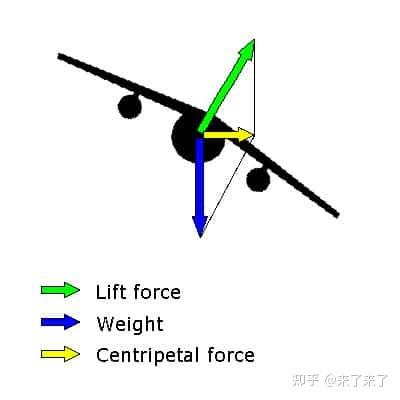
图片来自:https://http://pilotteacher.com/why-do-airplanes-bank-when-turning/
参考解释:
https://http://aviation.stackexchange.com/questions/67026/why-do-planes-need-a-roll-motion#:~:text=Think%20about%20the%20airplane%20as,not%20able%20to%20compensate%20itaviation.stackexchange.com/questions/67026/why-do-planes-need-a-roll-motion#:~:text=Think%20about%20the%20airplane%20as,not%20able%20to%20compensate%20it
3.内旋和外旋等价简单说明:
图示:
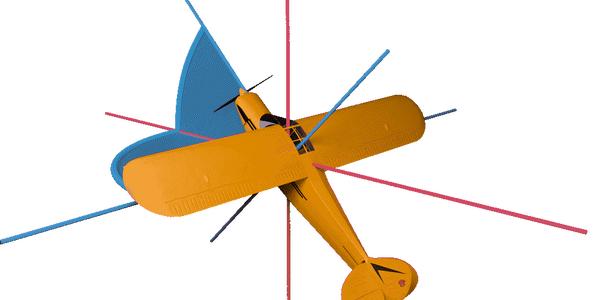
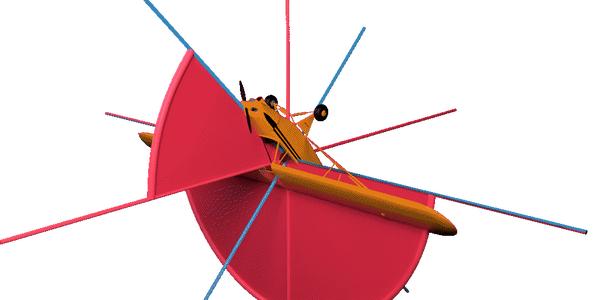
Roll-Pitch-Yaw (extrinsic rotation) 180°-45°-90°
图来自:https://http://dominicplein.medium.com/extrinsic-intrinsic-rotation-do-i-multiply-from-right-or-left-357c38c1abfd
简单证明:https://http://dreamanddead.github.io/post/understanding-euler-angles/
最后
以上就是愉快哈密瓜最近收集整理的关于三维旋转问题的全部内容,更多相关三维旋转问题内容请搜索靠谱客的其他文章。

![[UE4]roll pitch yaw](https://www.shuijiaxian.com/files_image/reation/bcimg15.png)



![[UE4][BluePrint] 钳制 PawnController 的 Rotation Yaw 和 Pitch](https://www.shuijiaxian.com/files_image/reation/bcimg19.png)


发表评论 取消回复