1、内容简介
239
2、内容说明
答1疑2咨3询4企q鹅q号:1762016542
3、仿真分析
clc
close all
clear
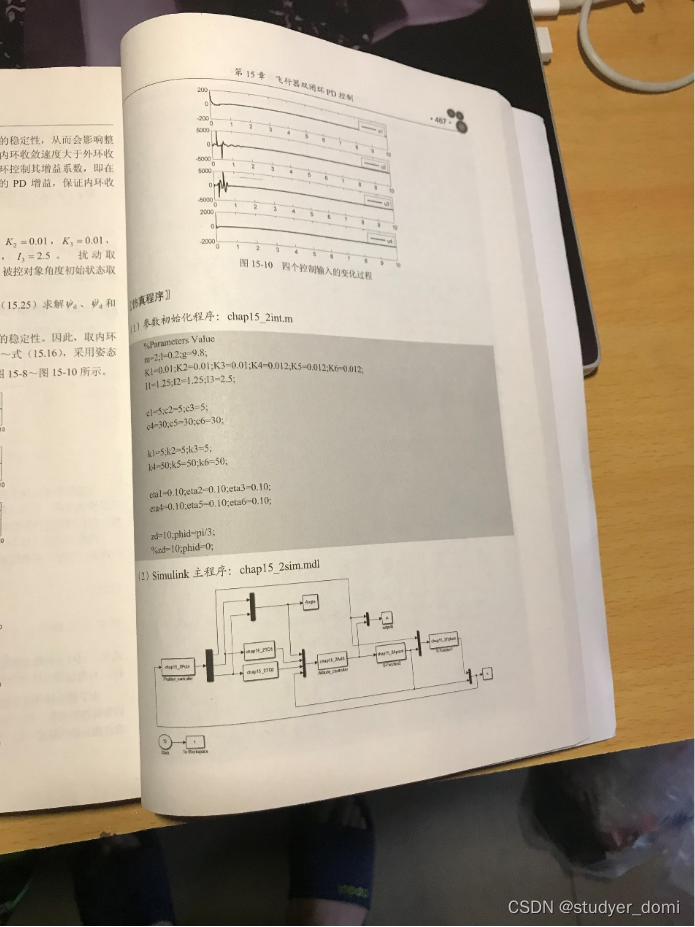
m=2;
l=0.2;
g=9.8;
K1=0.01;
K2=0.01;
K3= 0.01;
K4=0.012;
K5=0.012;
K6 = 0.012;
l1=1.25;
l2=1.25;
l3=2.5;
c1=5;c2=5;c3=5;
c4=30;c5=30;c6=30;
k1= 5;k2=5;k3=5;
k4=50;k5=50;k6=50;
eta1=0.1;eta2=0.1;eta3=0.1;
eta4=0.1;eta5=0.1;eta6=0.1;
zd=10;phid=pi/3;
4、参考论文
略
最后
以上就是暴躁电源最近收集整理的关于pid飞行姿态控制的全部内容,更多相关pid飞行姿态控制内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复