写在前面的话:近日,有小伙伴反应在dronekit中采用channel.override没有效果,因此抽个空看了一下ardupilot代码中遥控器的读取代码。
首先,遥控器的读取在copter.cpp中完成, 如下图所示:
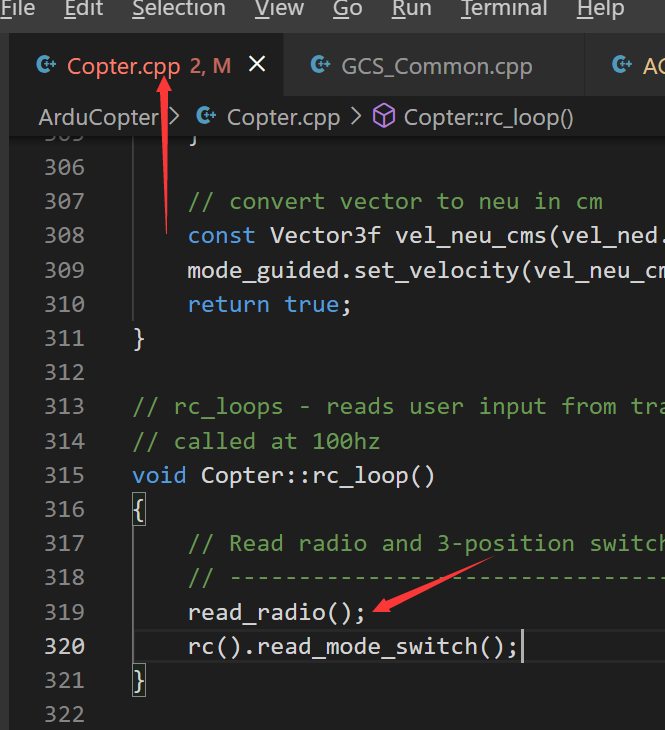
可见读取的频率为100Hz, 接着跳转进去,可以得到:
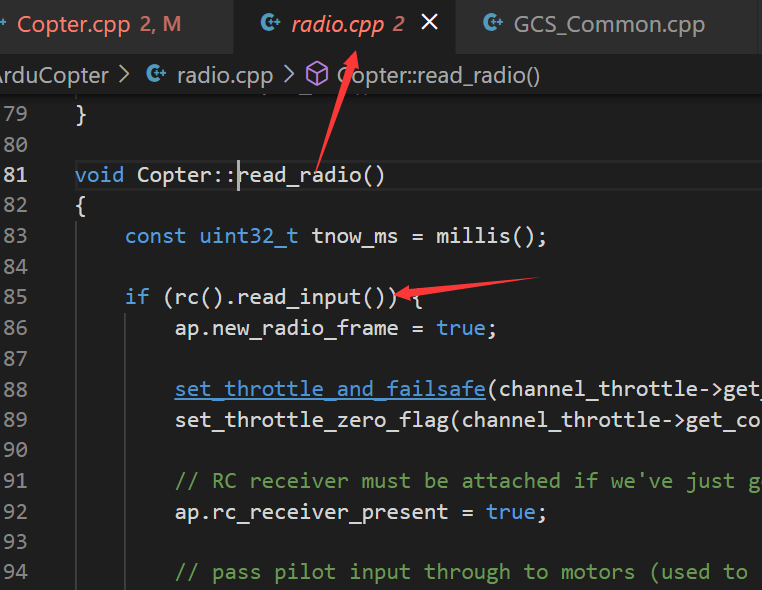
再次进行跳转可得:
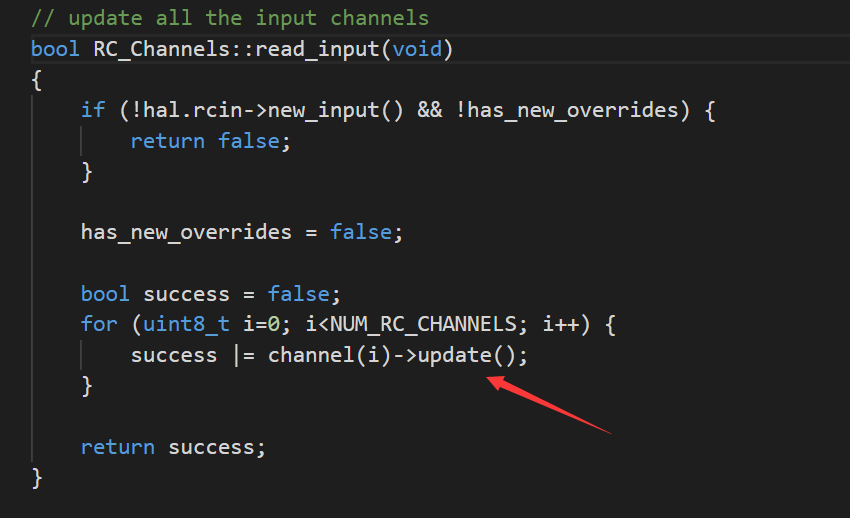
跳转update()函数进去
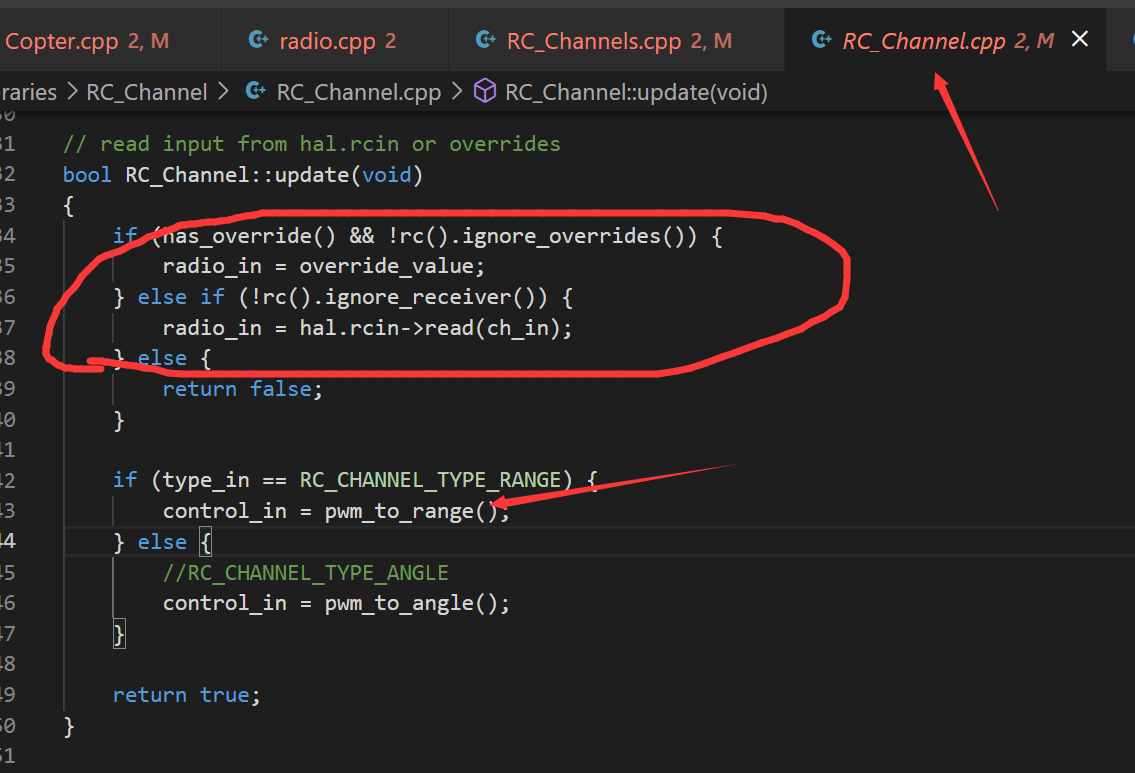
这个地方需要说明一下:上图画圈的地方可以看出
radio_in 来自2个地方: 1. 从mavlink消息中传送进来, 2. 从后端接口读取;
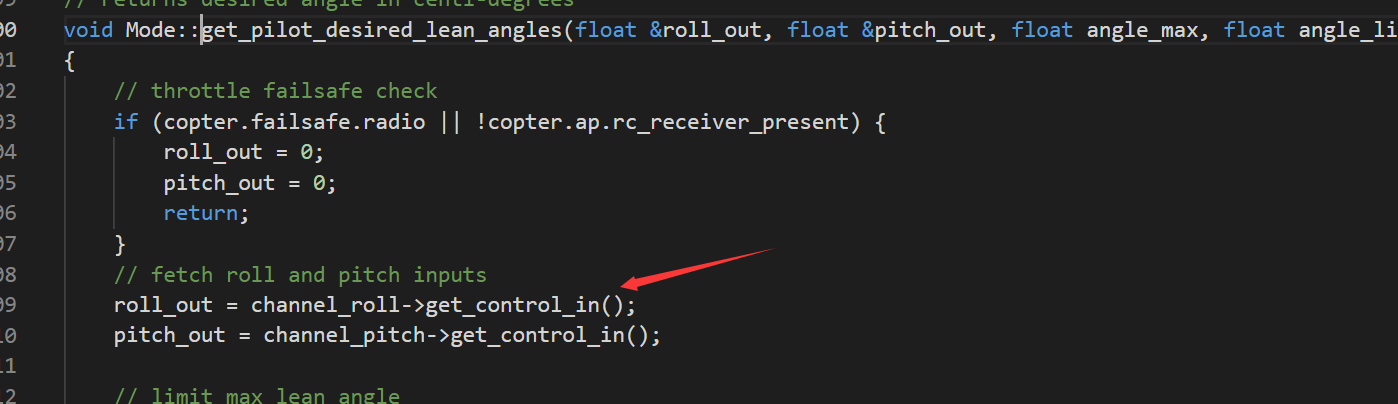
下面箭头的函数则负责将 radio_in的数据转换成 control_in的数据。
然后在各种mode中就可以通过调用control_in的数据达到 利用遥控器控制无人机的目的了
举例如下:在stabilize中
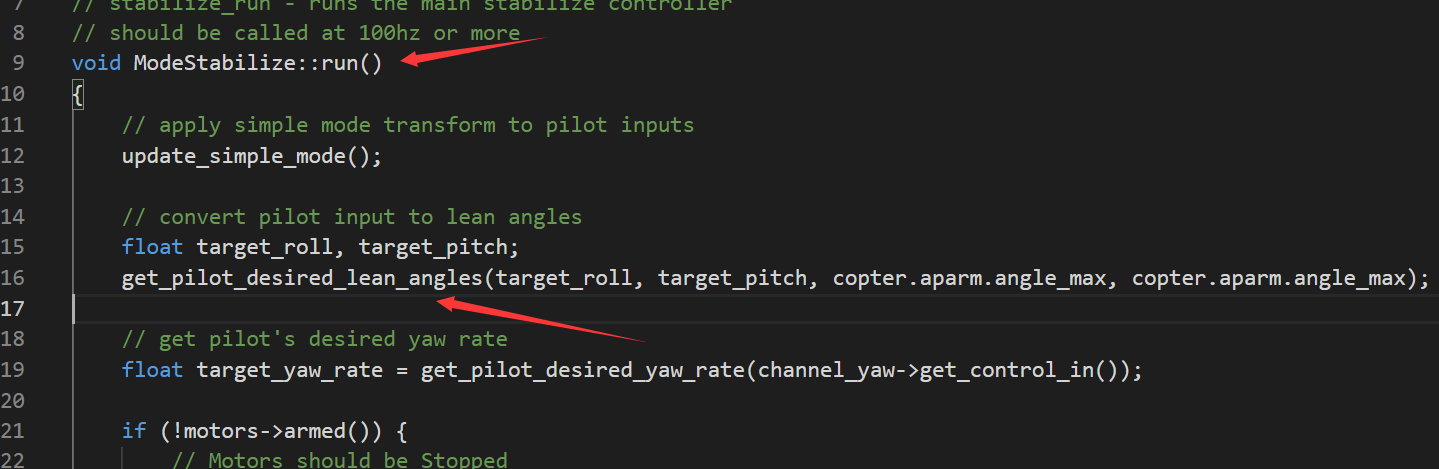
找到对应的语句,跳转进去可得:
然后我们再来看一下mavlink消息,对应消息为:
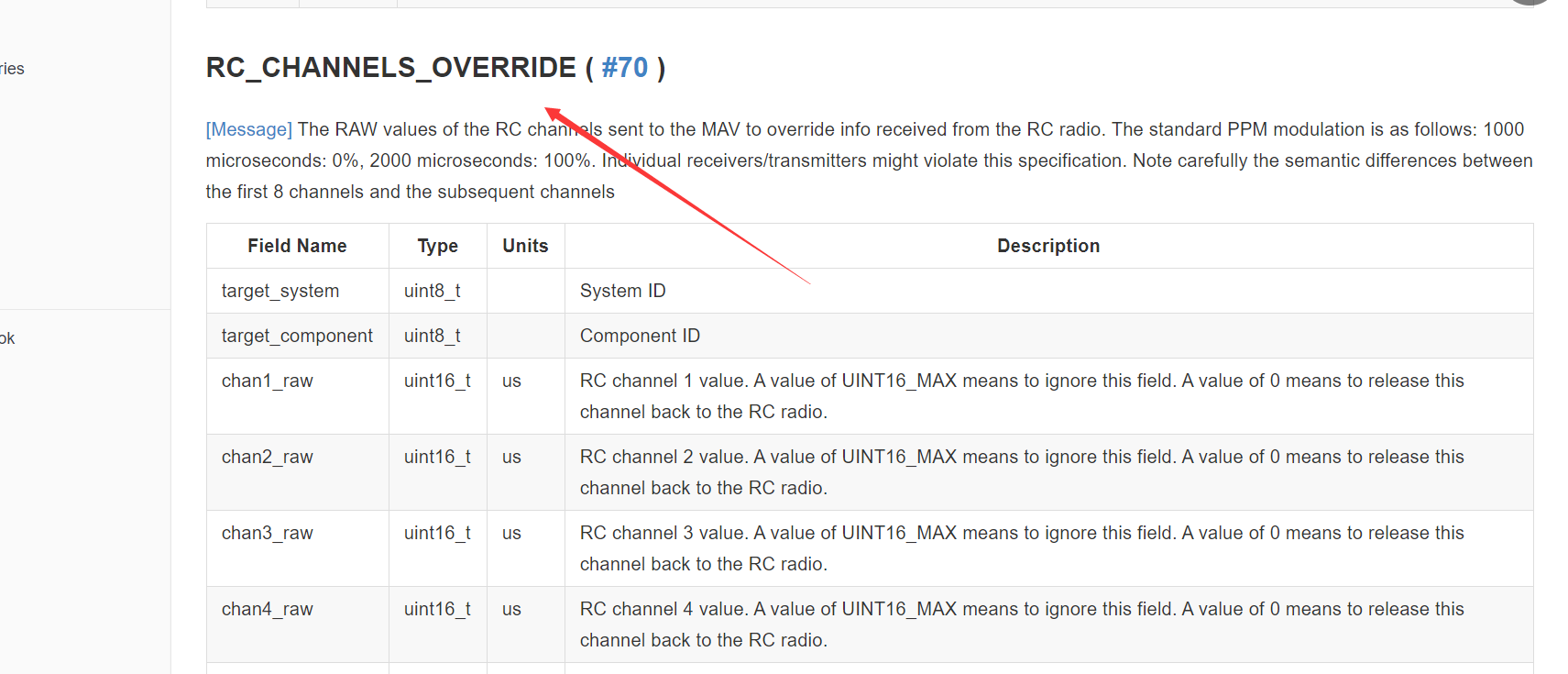
对应消息为:

跳转进去,
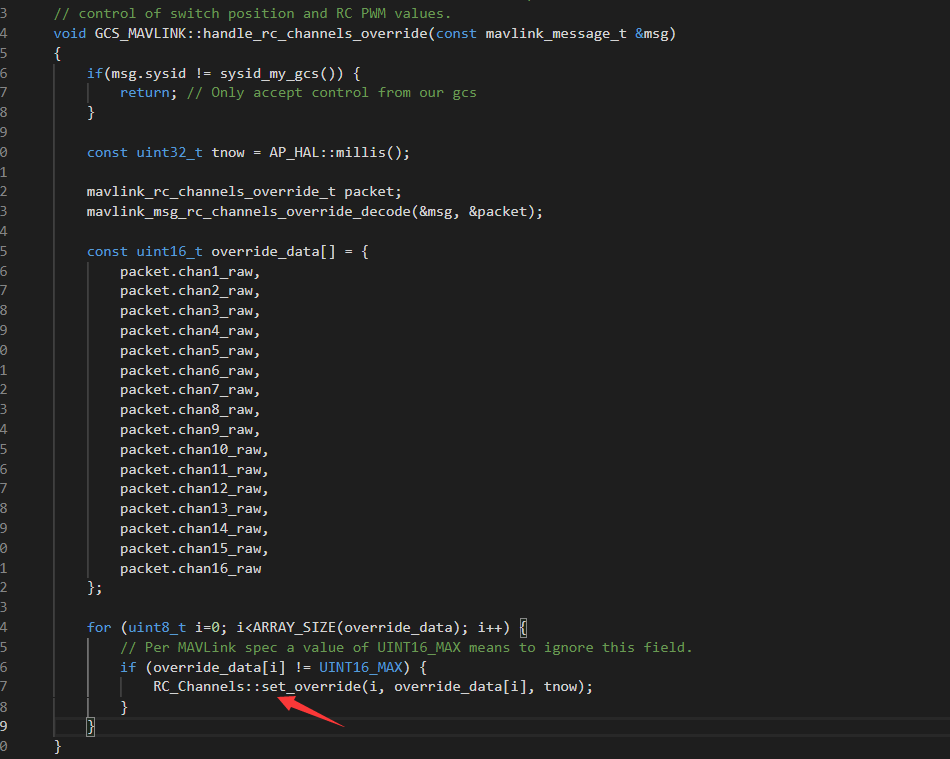
进入之后,如下图所示,然后再次执行跳转
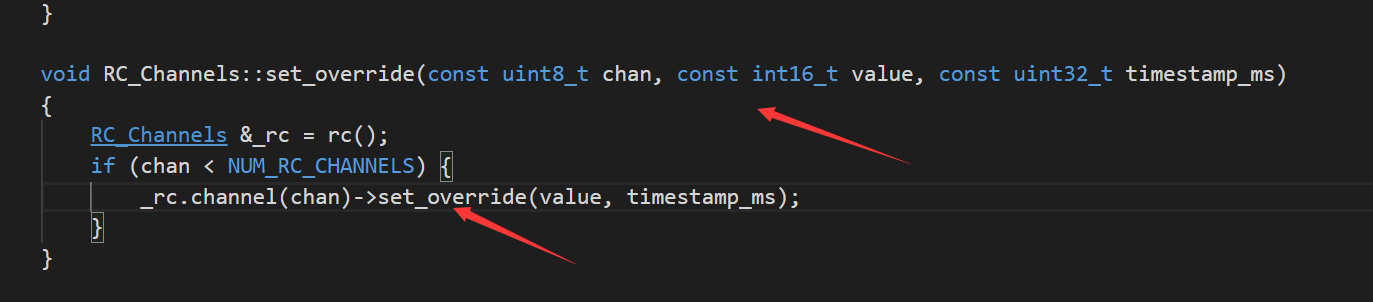
再次执行跳转
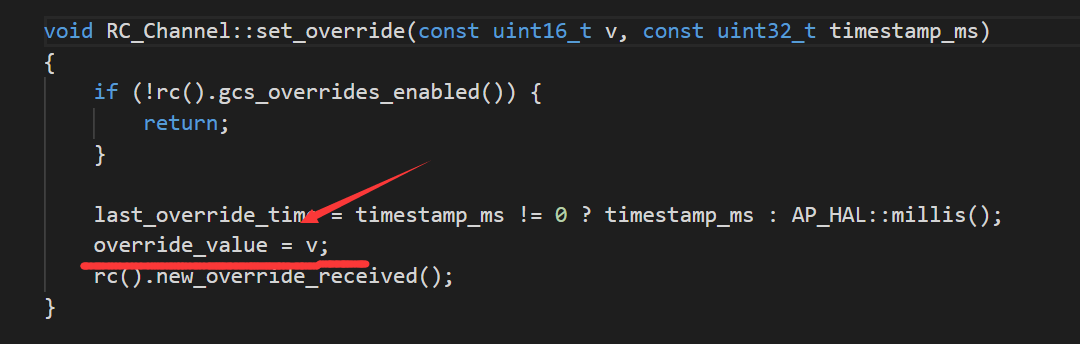
可见最后,值是赋值给override_value的变量中。
而上述所说的radio_in 是从override_value中取值进行赋值。
最后
以上就是健壮钢笔最近收集整理的关于ArduPilot之遥控器数据读取的全部内容,更多相关ArduPilot之遥控器数据读取内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复