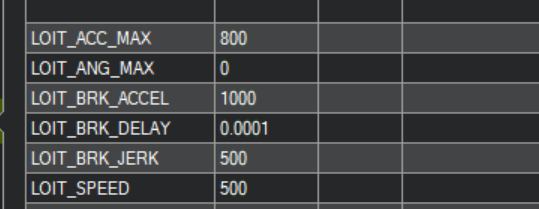
LOIT_ACC_MAX(默认500) : 最大加速度,增大该值可以让无人机更快地加减速。
LOIT_BRK_ACCEL (默认250): 最大刹车加速度,增大该值可以让无人机刹车更猛。(遥控器遥杆回中时更快定住)
LOIT_BRK_DELAY(默认1秒) : 刹车延时,遥控器遥杆回中后,延时一定时间,无人机开始刹车,调小该值能更快使无人机定住。
LOIT_BRK_JERK(默认500) : 刹车时最大加加速度,增大该值,刹车更猛。
最后
以上就是帅气花卷最近收集整理的关于PIX飞控LOITER模式刹车设置的全部内容,更多相关PIX飞控LOITER模式刹车设置内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复