0. 简介
在面对二维与三维之间的转换时,我们常常会困惑该如何去转换,在G2O中存在有理想的坐标转换工具,但是在Sophus中却缺乏这样的手段。之前在Sophus处简要的介绍了一下SE(2)与SE(3)的转换,最近发现之前的文章这部分需要拿出来详细的说一说。
1. 欧拉角与旋转向量
欧拉角、旋转向量、四元数和旋转矩阵是Sophus中常常提到的几个名词,欧拉角和旋转向量是类似的,SO(3)的旋转矩阵有9个量,但是只有3个自由度,并且是单位正交矩阵,具有冗余性,对其估计或优化问题的求解不方便。我们可以用一个旋转轴和一个旋转角描述任意旋转。一个方向与旋转轴一致,长度(模)等于旋转角的向量,我们称之为旋转向量(或轴角)。
旋转向量到旋转矩阵:
R = c o s θ I + ( 1 − c o s θ ) n n T + s i n θ n ^ R = costheta I+(1-costheta)nn^T+sintheta hat{n} R=cosθI+(1−cosθ)nnT+sinθn^
其中提到的
n
^
hat{n}
n^是向量的旋转矩阵,由于是反对称矩阵,所以只存在三个自由度,我们可以
X
−
Y
−
Z
X-Y-Z
X−Y−Z轴来规定其反对称矩阵轴:
n
^
=
[
0
−
n
z
n
y
n
z
0
−
n
x
−
n
y
n
x
0
]
hat{n}=begin{bmatrix} 0 && -{n_z} && {n_y} \ {n_z} && 0 && -{n_x} \ -{n_y} && {n_x} && 0 end{bmatrix}
n^=
0nz−ny−nz0nxny−nx0
所以我们可以从se,so中得到旋转向量数值。而欧拉角对于轴角表示情况,转轴具有2个自由度,转角1个自由度。 根据三次基本转动选取的坐标轴的不同,欧拉角共有12种组合。如 果再考虑到可选取原始坐标系的坐标轴,也可选取“新”坐标系的坐标轴,则共有24种欧拉角表示。一般规定原始坐标系为静坐标系,每个基本转动后形成的新坐标系为动坐标系。
- 24 种欧拉角表示列举如下:
- 静轴(即转轴选静坐标系的坐标轴):
s X Y Z , s X Z Y , s X Y X , sXYZ,sXZY,sXYX, sXYZ,sXZY,sXYX,
s X Z X , s Y X Z , s Y Z X , sXZX,sYXZ,sYZX, sXZX,sYXZ,sYZX,
s Y X Y , s Y Z Y , s Z X Y , sYXY,sYZY,sZXY, sYXY,sYZY,sZXY,
s Z Y X , s Z X Z , s Z Y Z sZYX,sZXZ,sZYZ sZYX,sZXZ,sZYZ
动轴(即转轴选动坐标系的坐标轴):
r
Z
Y
X
,
r
Y
Z
X
,
r
X
Y
X
,
rZYX,rYZX,rXYX,
rZYX,rYZX,rXYX,
r
X
Z
X
,
r
Z
X
Y
,
r
X
Z
Y
,
rXZX,rZXY,rXZY,
rXZX,rZXY,rXZY,
r
Y
X
Y
,
r
Y
Z
Y
,
r
Y
X
Z
,
rYXY,rYZY,rYXZ,
rYXY,rYZY,rYXZ,
r
X
Y
Z
,
r
Z
X
Z
,
r
Z
Y
Z
rXYZ,rZXZ,rZYZ
rXYZ,rZXZ,rZYZ
静轴欧拉角和动轴欧拉角有如下规律:
绕静轴
X
Y
Z
XYZ
XYZ 分别 转
α
,
β
,
γ
α,β,γ
α,β,γ 角度的转动与绕动轴
Z
Y
X
ZYX
ZYX分别转
γ
,
β
,
α
γ,β,α
γ,β,α 角度的转动等价,其他形式的欧拉角亦有此类似规律。
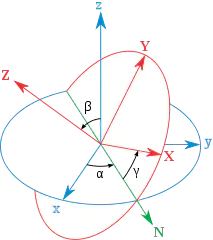
对于不同的坐标系定义,有不同的转换关系。我们只讨论常用的一种情况:如上图,右手系,Z轴朝上,X轴朝前,y轴朝左。绕Z轴作偏航(Yaw)运动,绕Y轴作俯仰(Pitch)运动,绕X轴作滚转(Roll)运动,运动正方向如上图所示。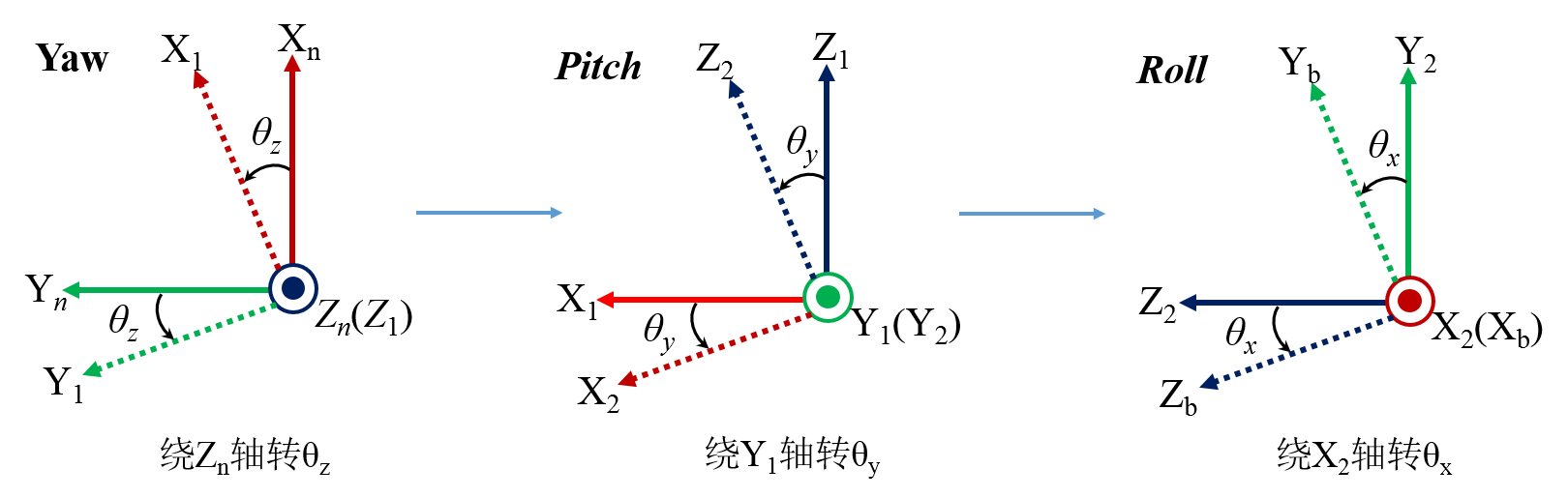
对于欧拉角计算公式我们可以得到
α
,
β
,
γ
α,β,γ
α,β,γ 三个角度计算得到的旋转矩阵
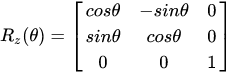

上式中
R
R
R与旋转次序有关,即当
θ
z
,
θ
y
,
θ
x
θz,θy,θx
θz,θy,θx不都为小角时,对应于不同的旋转次序,空间坐标系b的最终位置时不同的,这就是有限转动的不可交换性。但是当
θ
z
,
θ
y
,
θ
x
θz,θy,θx
θz,θy,θx都为小角时,忽略小角间的高阶小量,即:
Δ
x
→
0
,
c
o
s
Δ
x
→
1
,
s
i
n
Δ
x
→
Δ
x
Δx→0,cosΔx→1,sinΔx→Δx
Δx→0,cosΔx→1,sinΔx→Δx
R
≈
n
^
=
[
0
−
n
z
n
y
n
z
0
−
n
x
−
n
y
n
x
0
]
R approx hat{n}=begin{bmatrix} 0 && -{n_z} && {n_y} \ {n_z} && 0 && -{n_x} \ -{n_y} && {n_x} && 0 end{bmatrix}
R≈n^=
0nz−ny−nz0nxny−nx0
其中 θ z , θ y , θ x θz,θy,θx θz,θy,θx角度为弧度,此时 θ z , θ y , θ x θz,θy,θx θz,θy,θx构成的列向量 [ θ z , θ y , θ x ] T [θz,θy,θx]^T [θz,θy,θx]T可视为三维空间的(旋转)矢量,此时旋转后的坐标系的最终角位置与旋转次序无关:无限转动与旋转次序无关
2. SE(2)与SE(3)的转换
SE(2),通常是作为二维向量的表示形式,基本的组成部分为
x
,
y
,
y
a
w
x,y,yaw
x,y,yaw三参数,其格式如下:
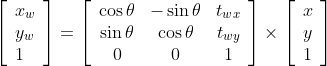
SE(3)则是在上式的基础上加入
z
z
z轴,其格式如下:
[ x w y w z w 1 ] = [ c 1 c 3 + s 1 s 2 s 3 c 3 s 1 s 2 − c 1 s 3 c 2 s 1 t w x c 2 s 3 c 2 c 3 − s 2 t w y c 1 s 2 s 3 − s 1 c 3 s 1 s 3 + c 1 c 3 s 2 c 1 c 2 t w z 0 0 0 1 ] × [ x y z 1 ] begin{bmatrix} x_w \ y_w \ z_w \ 1end{bmatrix} =begin{bmatrix} {c_1 c_3 + s_1 s_2 s_3} && {c_3 s_1 s_2 - c_1 s_3} && {c_2 s_1} && t_wx \ {c_2 s_3} && {c_2 c_3} && -{s_2} && t_wy \ {c_1 s_2 s_3 - s_1 c_3} && {s_1 s_3 + c_1 c_3 s_2} && {c_1 c_2} && t_wz \ 0 && 0 && 0 && 1end{bmatrix} times begin{bmatrix} x \ y \ z \ 1end{bmatrix} xwywzw1 = c1c3+s1s2s3c2s3c1s2s3−s1c30c3s1s2−c1s3c2c3s1s3+c1c3s20c2s1−s2c1c20twxtwytwz1 × xyz1

| 李群 | SO(3) | SE(3) |
|---|---|---|
| 旋转矩阵构建 | Sophus::SO3d SO3(R) | Sophus::SE3d SE3(R,t) |
| 四元数构建 | Sophus::SO3d SO3(q) | Sophus::SO3d SO3(q,t) |
| 输出 | SO3.matrix() | SE3.matrix() |
| 对数映射 | Vector3d so3=SO3.log() | Vecotr6d se3=SE3.log() |
| 指数映射 | SO3d::exp(so3) | SE3d::exp(se3) |
| 向量到反对称矩阵 | SO3d::hat(so3) | SE3d::hat(se3) |
| 反对称矩阵到向量 | SO3d::vee(hat) | SE3d::vee(hat) |
3. 示例代码
…详情请参照古月居
最后
以上就是外向石头最近收集整理的关于Sophus降维、升维与欧拉角、旋转向量的爱恨情仇0. 简介1. 欧拉角与旋转向量2. SE(2)与SE(3)的转换3. 示例代码的全部内容,更多相关Sophus降维、升维与欧拉角、旋转向量的爱恨情仇0.内容请搜索靠谱客的其他文章。








发表评论 取消回复