5 ROS仿真建模
- 5.1初识urdf和rviz的操作
- 5.1.1实现效果
- 5.1.2 Rviz和Urdf的显示实现
- 5.1.3 常见报错问题和解决
- 5.2初识urdf和gazebo的操作
- 5.2初识urdf和gazebo的操作
5.1初识urdf和rviz的操作
5.1.1实现效果
在启动rviz时,能够看到带有编写的urdf模型文件的模型。
启动roslaunch时候,得到如图所示的画面
5.1.2 Rviz和Urdf的显示实现
1、新建功能包,导入依赖包:urdf xacro gazebo_ros gazebo_ros_control gazebo_plugins
2、编写 urdf 文件
3、在 launch 文件集成 URDF 与 Rviz
4、在 Rviz 中显示机器人模型
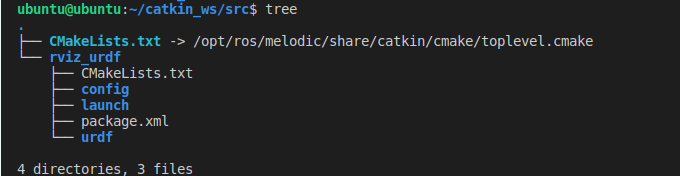
1、创建功能包,导入依赖
创建一个新的功能包,名称自定义然后导入依赖urdf xacro gazebo_ros gazebo_ros_control gazebo_plugins
2、在当前功能包下,再新建几个目录:
urdf:存储 urdf 文件的目录
meshes:机器人模型渲染文件(暂不使用)
config: 配置文件
launch: 存储 launch 启动文件
world:存放场景地图文件
3、在urdf文件夹下编写urdf的内容
<!--初识urdf和rviz的urdf文件-->
<robot name="first_acquaint_urdf">
<!-- link 决定rviz fixed frame的坐标系 -->
<link name="base_link">
<!-- 可视化 -->
<visual>
<!-- 可视化几何图形 -->
<geometry>
<box size="0.5 0.2 0.1" />
</geometry>
</visual>
</link>
</robot>
4、在launch文件夹下编写launch文件
<launch>
<!-- 设置参数 其中param的名字必须是robot_description -->
<param name="robot_description" textfile="$(find rviz_urdf)/urdf/first_acquaint_urdf.urdf" />
<!-- 启动 rviz -->
<node pkg="rviz" type="rviz" name="rviz" />
</launch>
5、导入到rviz第一步
①在终端跳转到catkin_ws/目录下输入
source ./devel/setup.bash
②直接输入roslaunch <文件夹rviz_urdf> <launch文件名>
③在rviz里的add添加robotmodel
6、保存rviz的config,存到launch文件
<!--初识urdf和rviz的操作 launch文件 -->
<launch>
<!-- 设置参数 其中param的名字必须是robot_description -->
<param name="robot_description" textfile="$(find rviz_urdf)/urdf/first_acquaint_urdf.urdf" />
<!-- 启动 rviz -->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find rviz_urdf)/config/first_acquaint_urdf.rviz" />
</launch>
5.1.3 常见报错问题和解决
1、urdf模型不显示,并且rviz的robotmodel栏下提示status error,parameter robot_description…
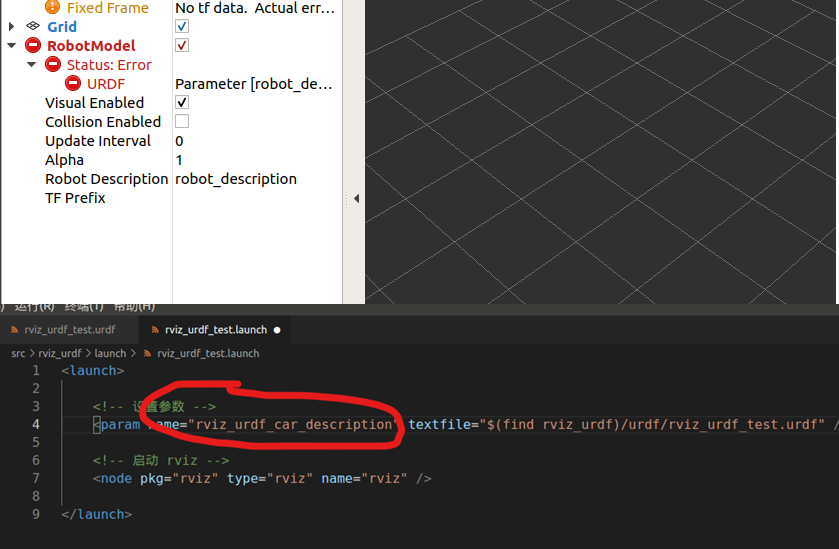
解决:在rviz启动的launch文件,robot_description是固定的,不能做修改。
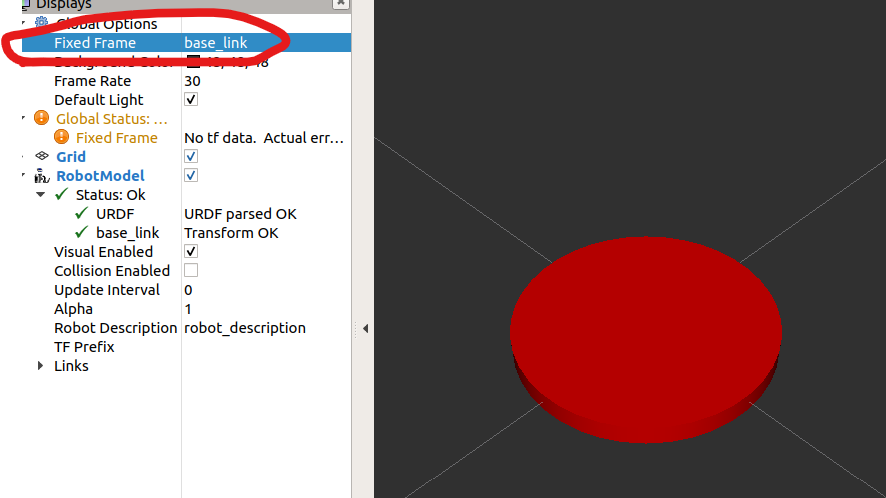
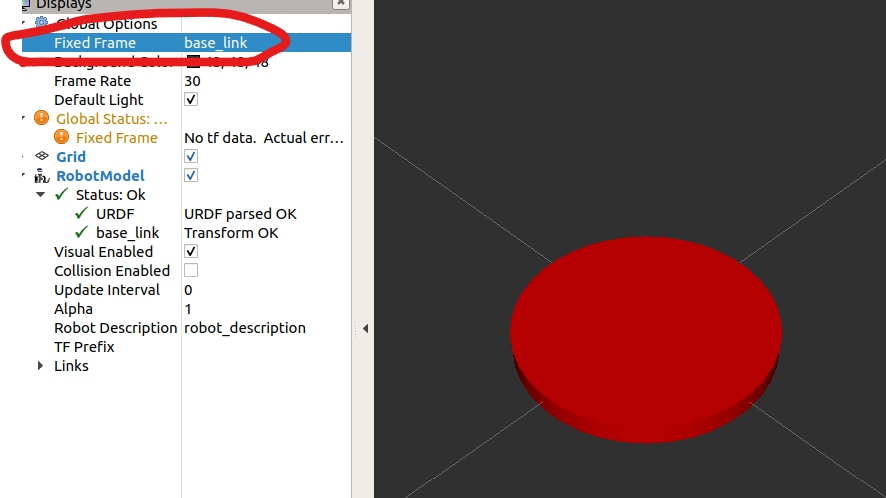
2、Rviz中base_link报错,同时模型文件发白
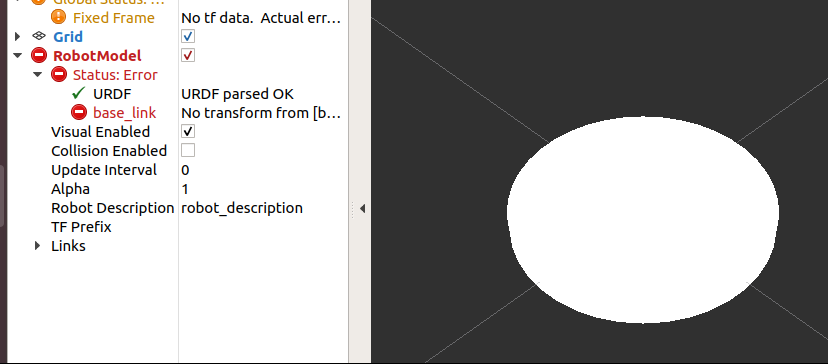
解决:由于URDF文件写的base_link名和RVIZ不一样 改成urdf的base_link名字即可,注意修改是在global options下的fixed frame
5.2初识urdf和gazebo的操作
5.2初识urdf和gazebo的操作
1、新建功能包,导入依赖包:urdf xacro gazebo_ros gazebo_ros_control gazebo_plugins
2、编写 urdf 文件
3、在 launch 文件集成urdf 与 gazebo
4、在 gazebo中显示机器人模型
1、创建功能包,导入依赖
创建一个新的功能包,名称自定义然后导入依赖urdf xacro gazebo_ros gazebo_ros_control gazebo_plugins,然后在当前功能包下,再新建几个目录
urdf:存储 urdf 文件的目录
meshes:机器人模型渲染文件(暂不使用)
config: 配置文件
launch: 存储 launch 启动文件
world:存放场景地图文件
2、在urdf文件夹下编写urdf的内容
<robot name="hello_gazebo">
<link name="base_coordinate">
<visual>
<geometry>
<sphere radius="0.2" />
</geometry>
</visual>
<collision>
<geometry>
<sphere radius="0.2" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<inertial>
<origin xyz="0 0 0" />
<mass value="6" />
<inertia ixx="1" ixy="0" ixz="0" iyy="1" iyz="0" izz="1" />
</inertial>
</link>
</robot>
该urdf和之前相比,多了关于真实环境描述的collision和inertial
3、在launch文件夹下编写launch文件
<launch>
<!-- 设置参数 其中param的名字必须是robot_description -->
<param name="robot_description" textfile="$(find gazebo_urdf)/urdf/helloworld_gazebo.urdf" />
<!-- 启动 gazebo -->
<include file="$(find gazebo_ros)/launch/empty_world.launch" />
<!-- 在 gazebo 中显示机器人模型 -->
<node pkg="gazebo_ros" type="spawn_model" name="hello_gazebo" args="-urdf -model hello_gazebo -param robot_description" />
</launch>
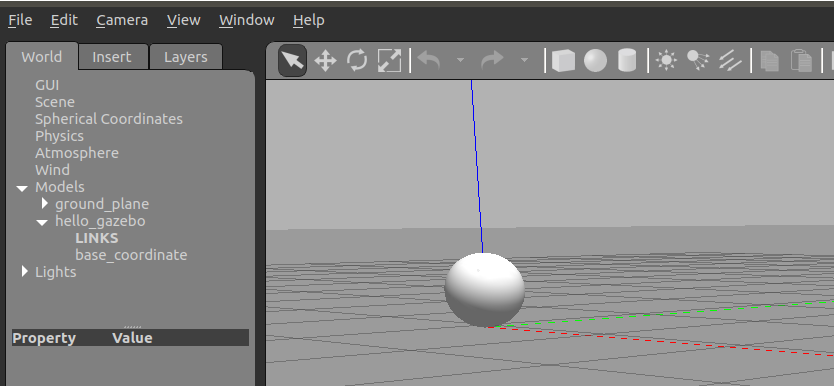
4、启动launch在gazebo里查看模型
上一篇: 4 ROS-Arduino.
下一篇: 5 ROS仿真建模(2- urdf文件的编写和仿真场景搭建).
最后
以上就是顺心超短裙最近收集整理的关于5 ROS仿真建模(1- urdf和rviz、gazebo的基础操作)5.1初识urdf和rviz的操作5.2初识urdf和gazebo的操作的全部内容,更多相关5内容请搜索靠谱客的其他文章。








发表评论 取消回复