目录
- 一、下载sw_urdf_exporter插件
- 二、使用Solidworks绘制挖掘机三维模型
- 三、创建每一个link的坐标系
- 四、创建每一个joint的旋转轴
- 五、打开插件进行配置(在URDF界面设置坐标系和旋转轴)
- 1.打开“工具—Tools—Export as URDF”进入到配置界面。
- 2.配置base_link
- 3.依次配置其他转动节点
- 4.配置完所有link后,点击“Preview and Export”选项
- 5.依次配置转动参数
- 7.导出文件
- 六、运行导出的文件
- 七相关问题处理及其他补充说明
- (1)—运行roslaunch model20211 display.launch时出现如下警告:
- (2)—关于rviz中加载模型
- (3)—更改模型的颜色
- 未完待续~~~~
URDF(Universal Robot Description Format)——通用机器人描述格式,它是ROS里边使用的一种机器人的描述文件,包含的内容有:连杆、关节,运动学和动力学参数、可视化模型、碰撞检测模型等。
一、下载sw_urdf_exporter插件
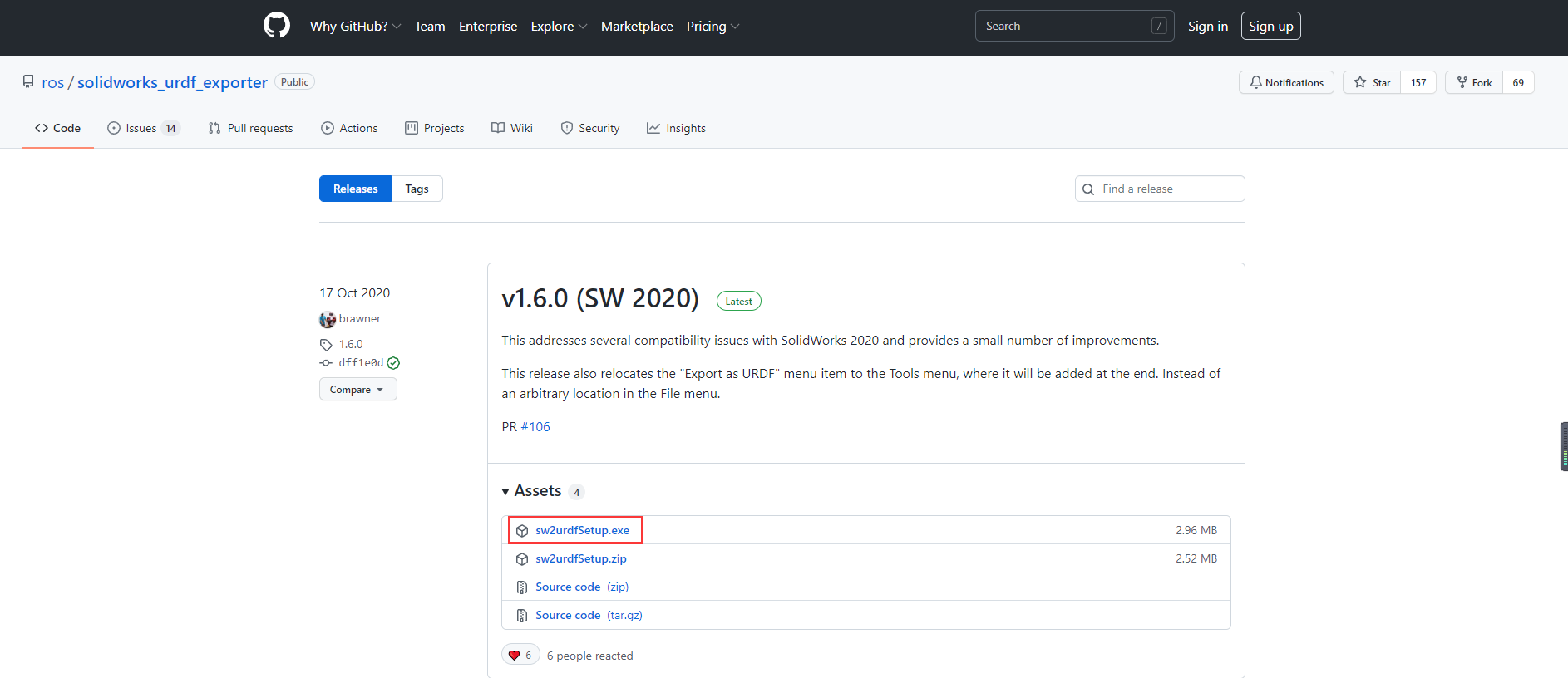
ROS提供了SolidWorks转URDF的插件(下载链接)—sw2urdfSetup.exe,下载后点击安装,安装完成后就能在solidworks中导出URDF模型了。
点击下载之后如下图所示:
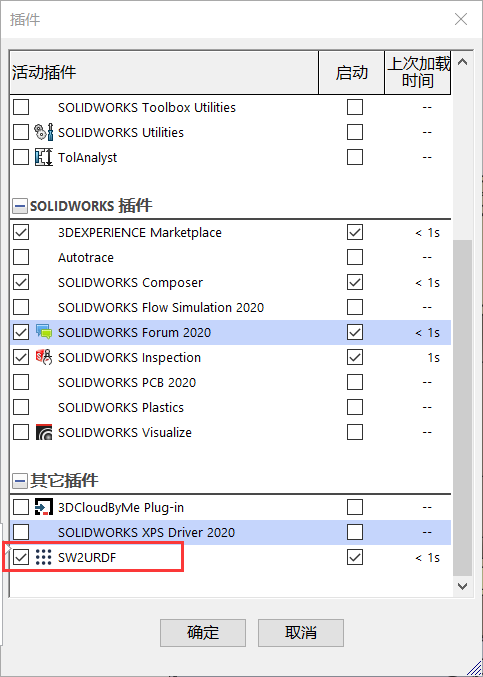
安装之后再打开solidworks软件,在工具栏中选择插件,如下图所示:
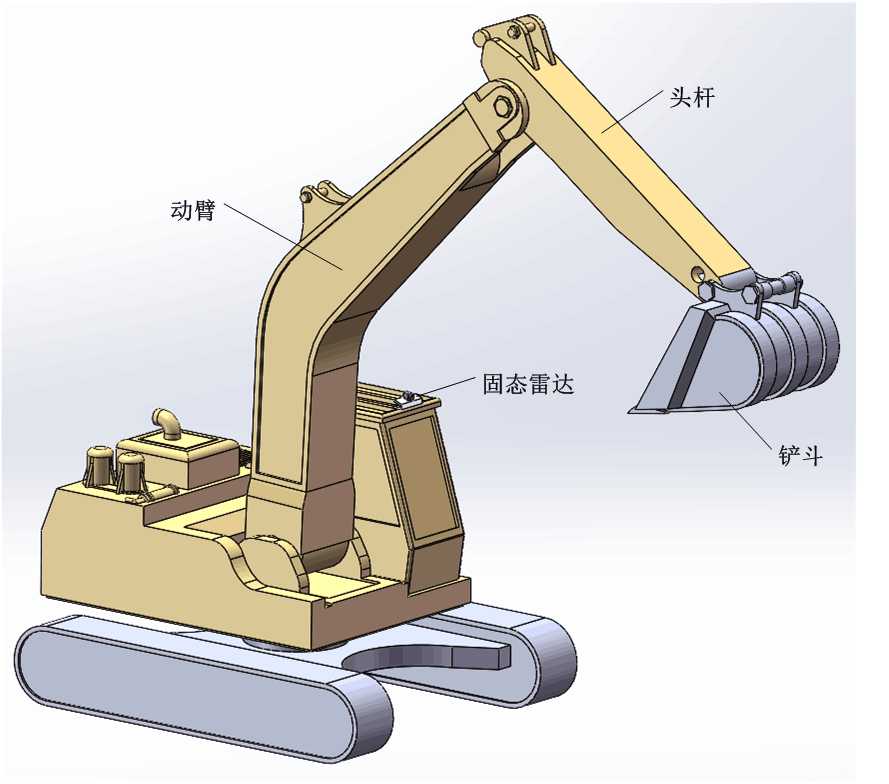
二、使用Solidworks绘制挖掘机三维模型
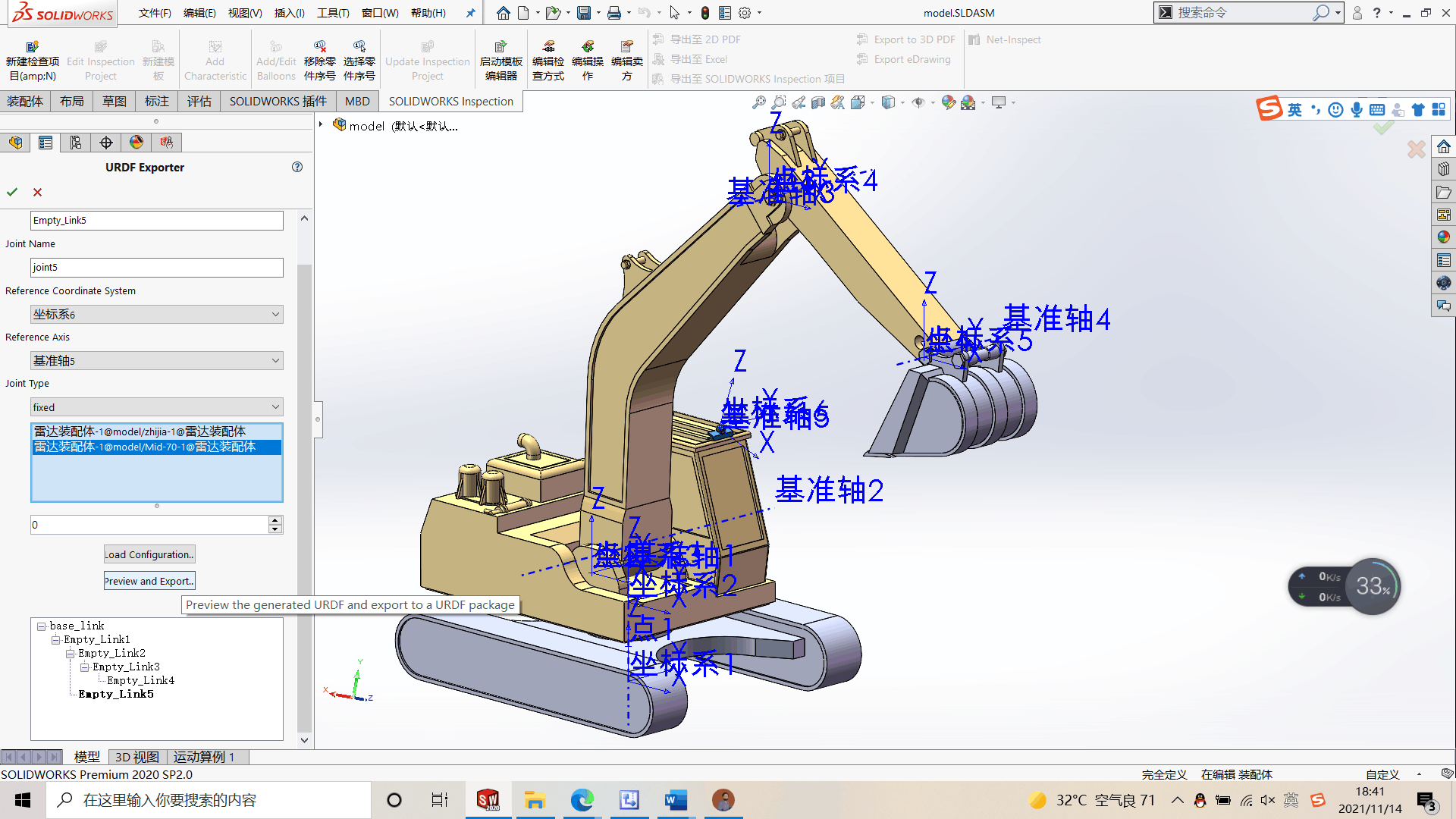
下面以挖掘机模型为例进行说明,使用的SolidWorks版本为SW2020。绘制的模型应是有多个零件(多个实体)组成的装配体,每个link对应一个实体。挖掘机模型如下图所示:
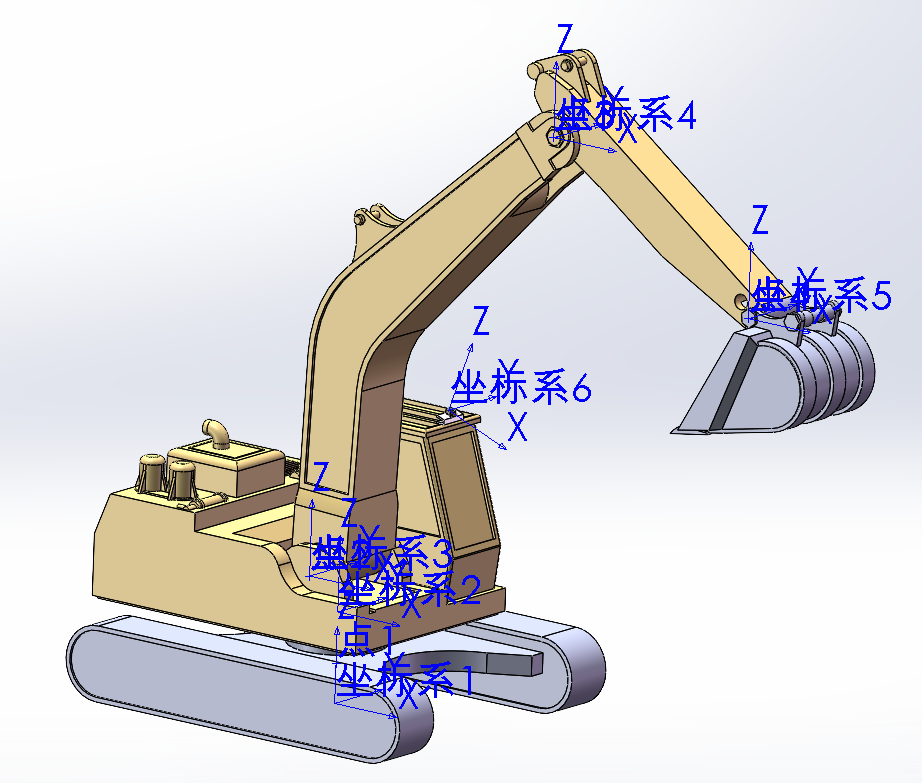
三、创建每一个link的坐标系
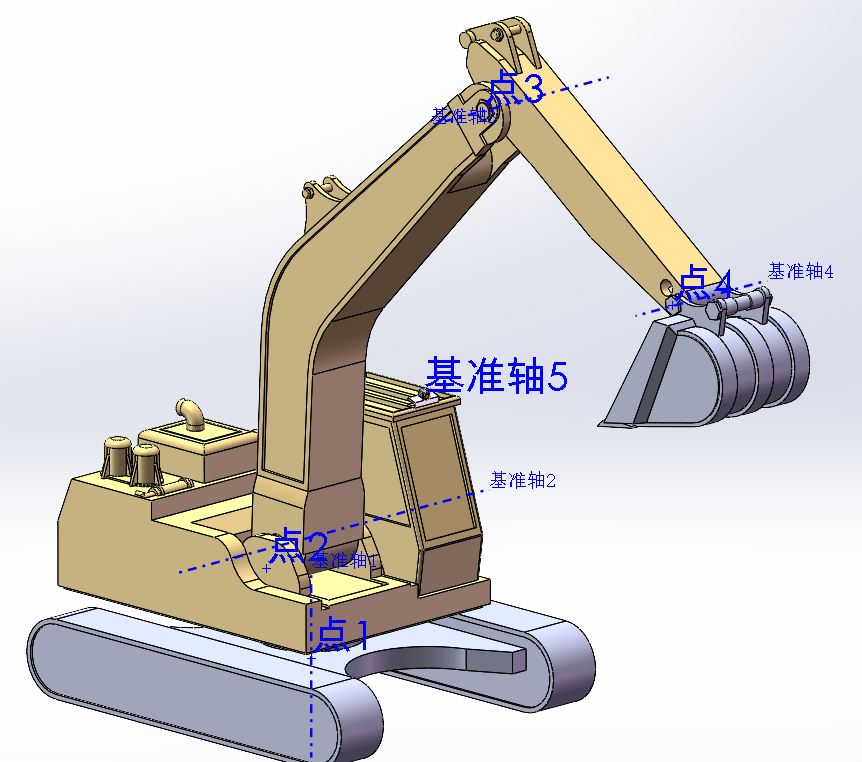
四、创建每一个joint的旋转轴
五、打开插件进行配置(在URDF界面设置坐标系和旋转轴)
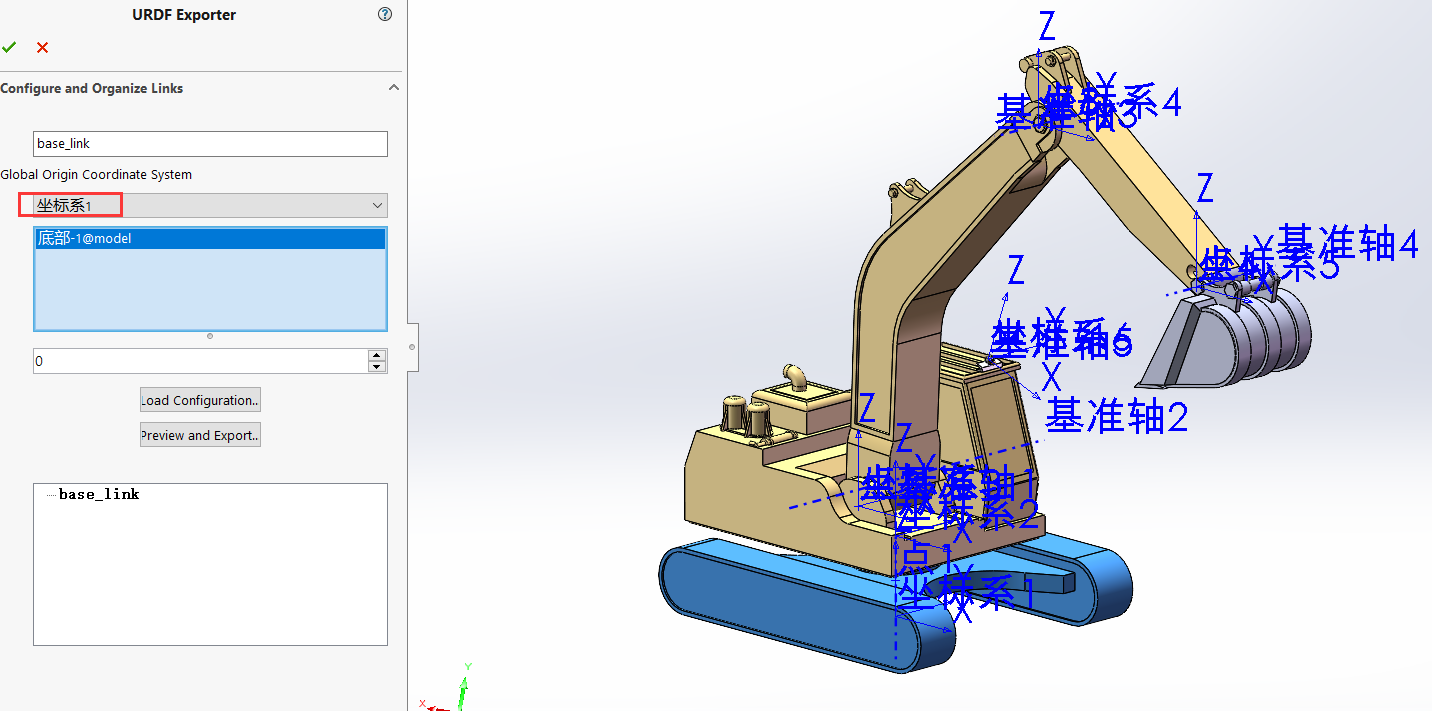
1.打开“工具—Tools—Export as URDF”进入到配置界面。
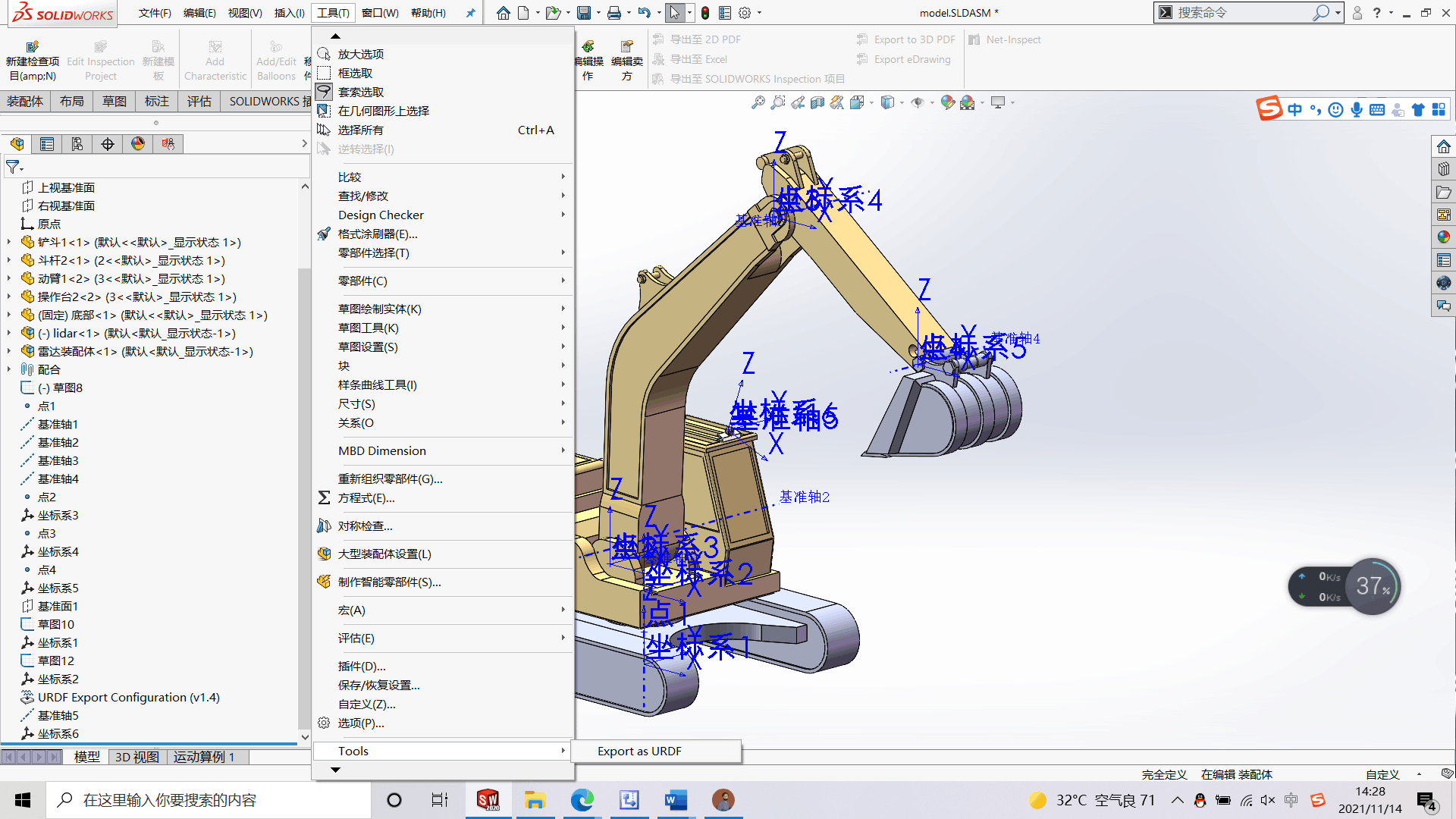
点击Export as URDF后出现配置界面
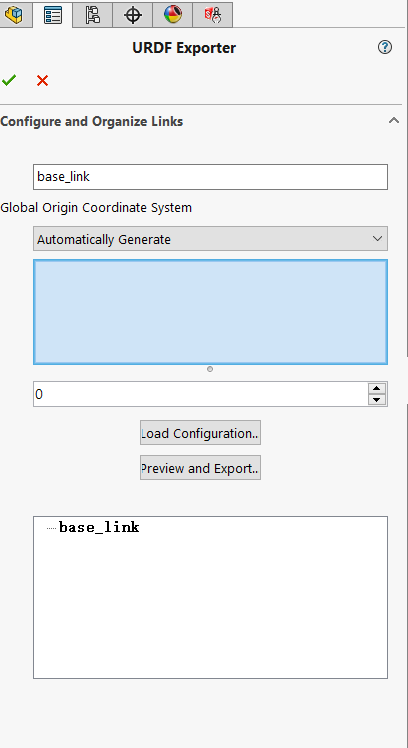
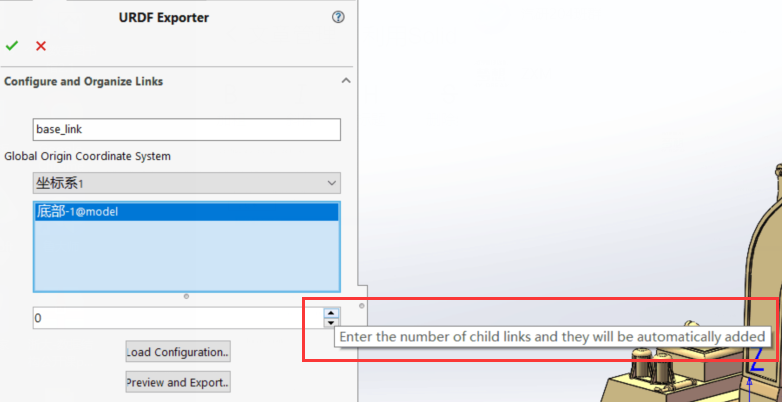
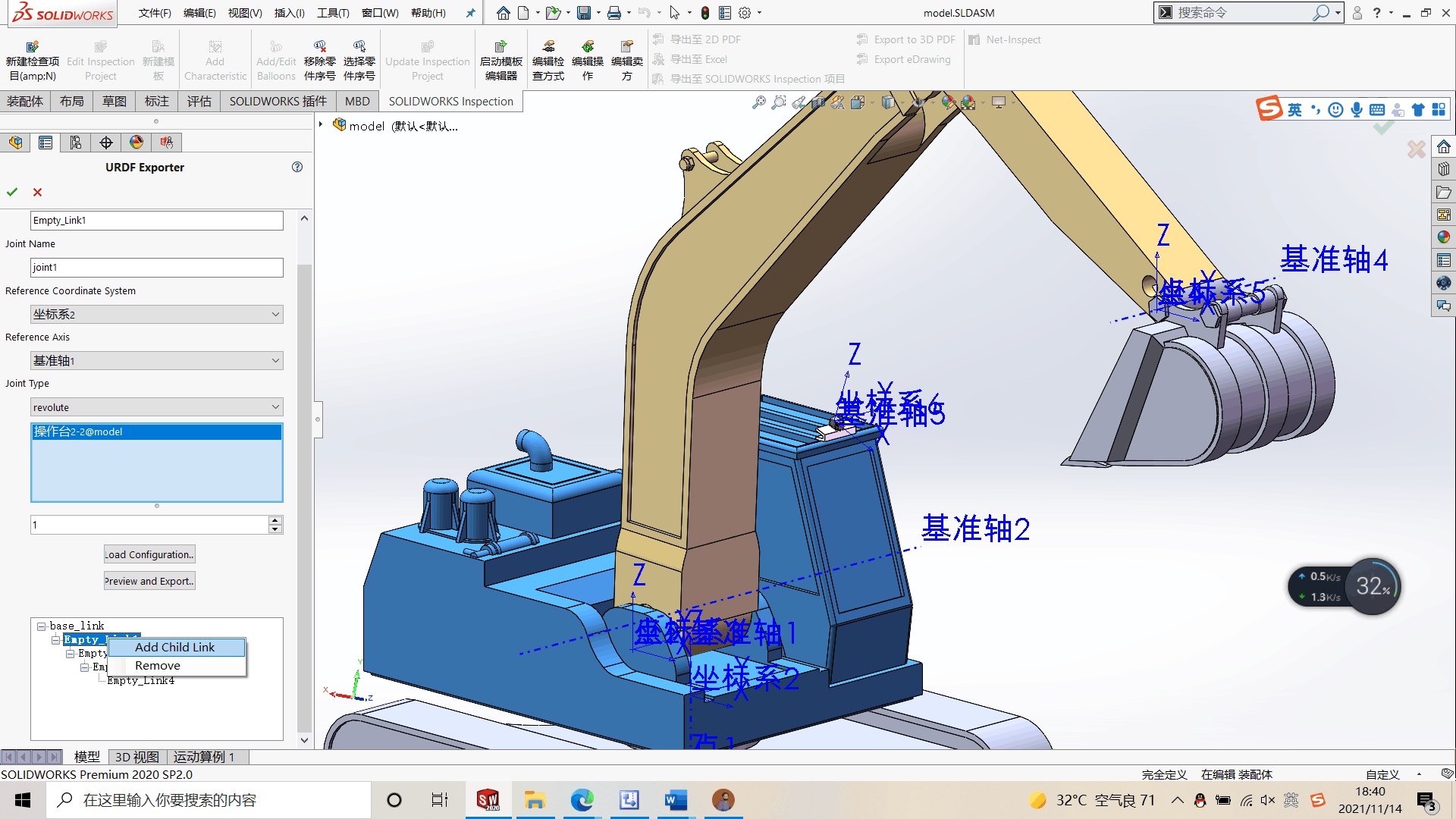
2.配置base_link
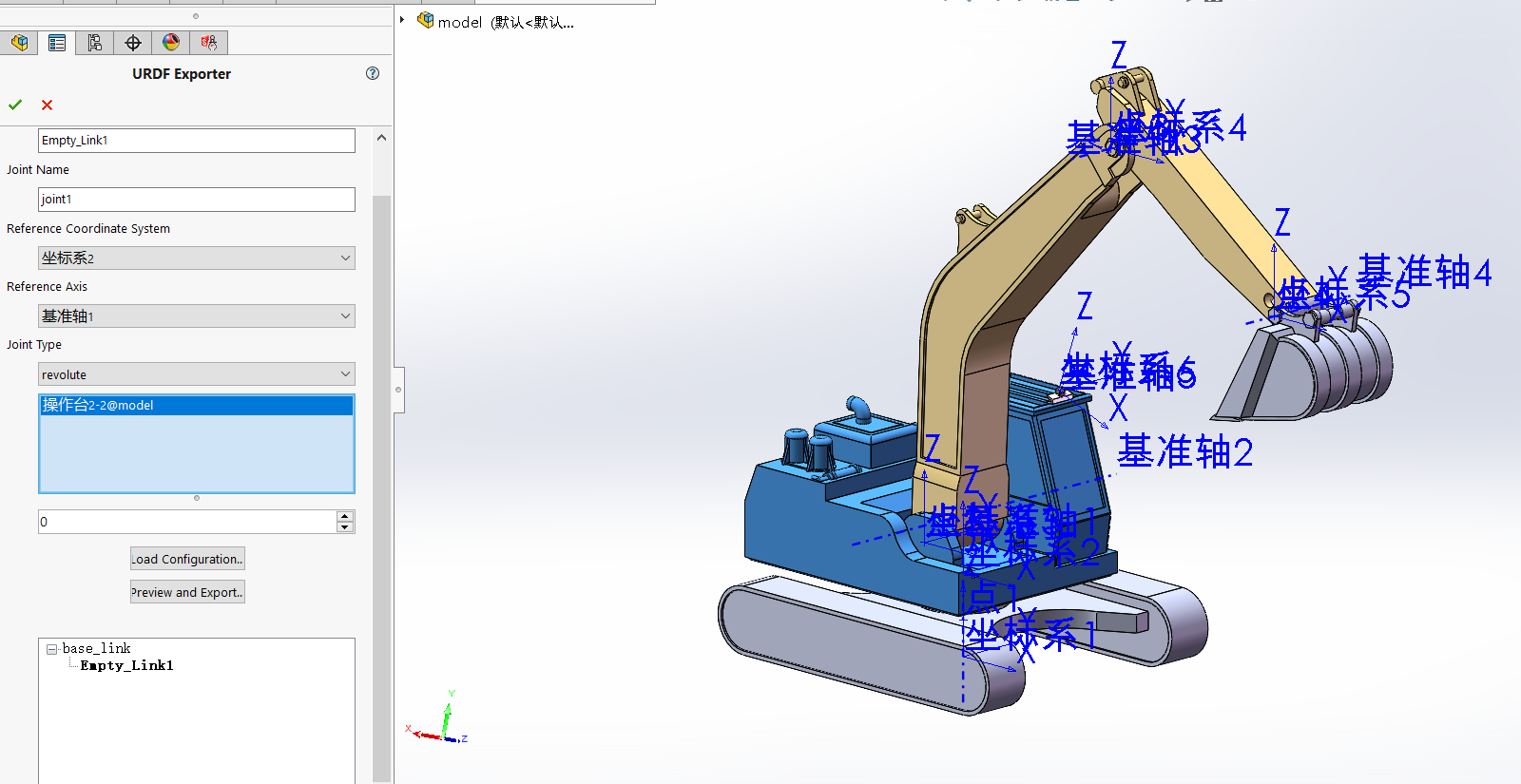
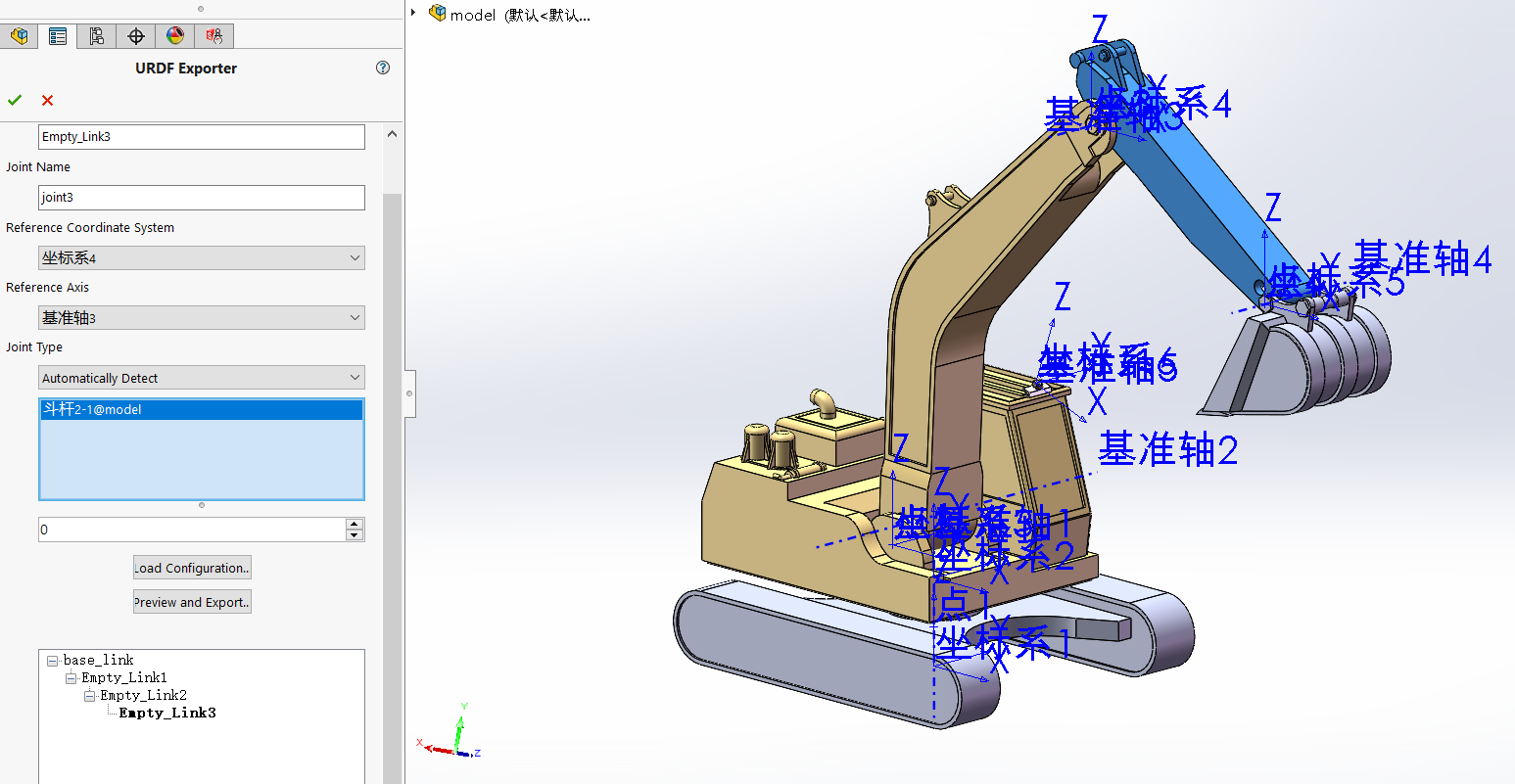
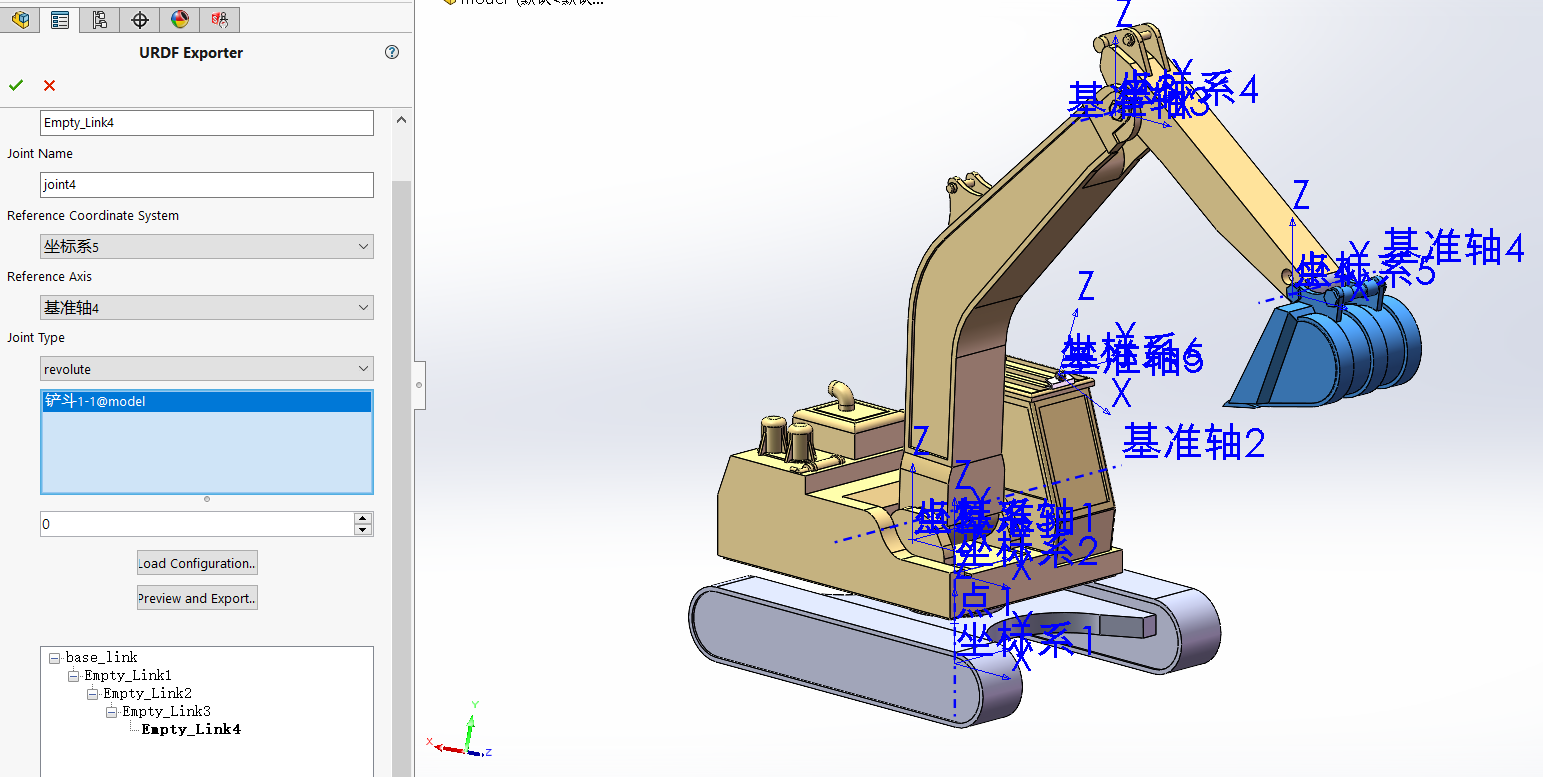
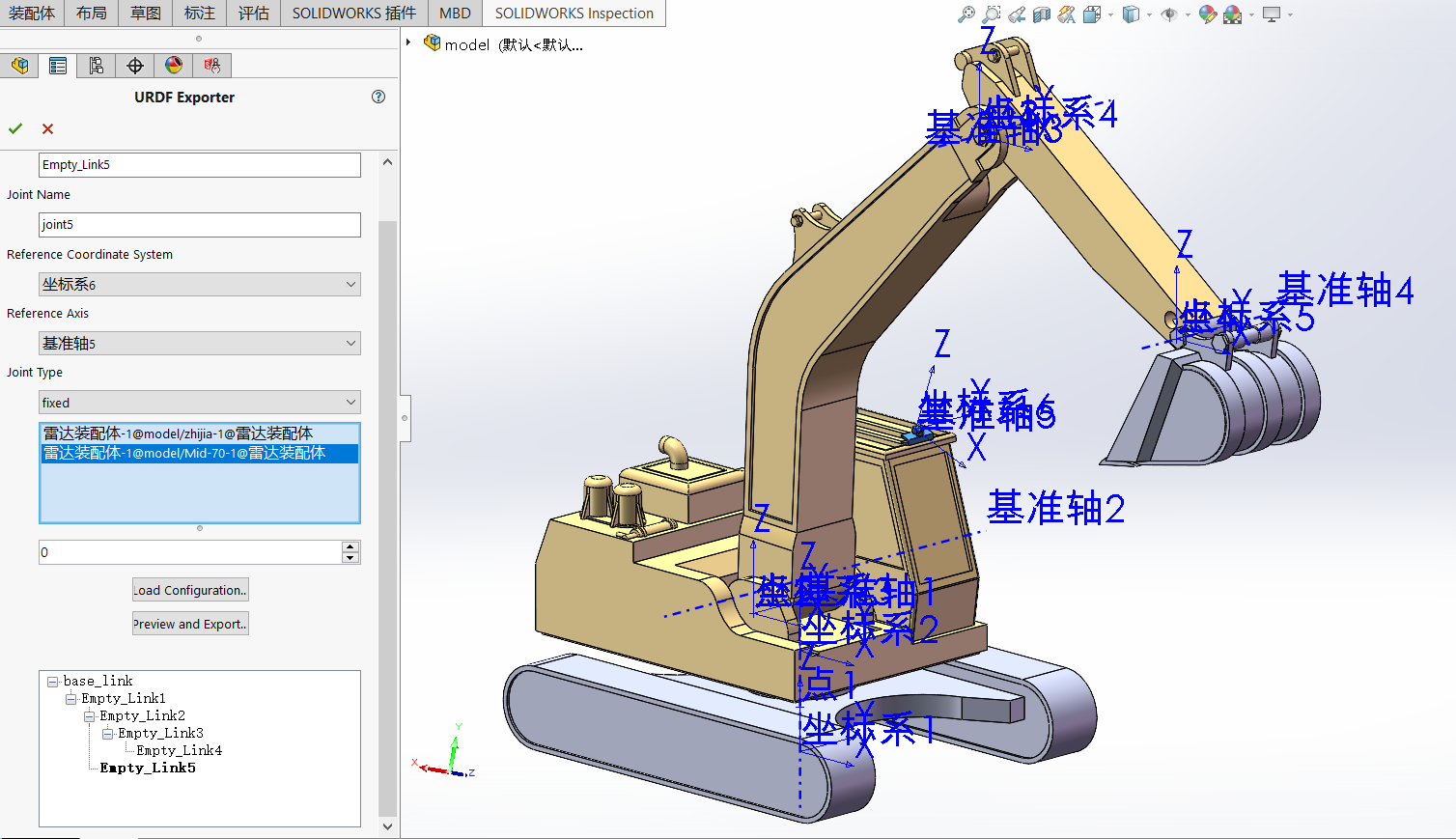
3.依次配置其他转动节点
配置车身
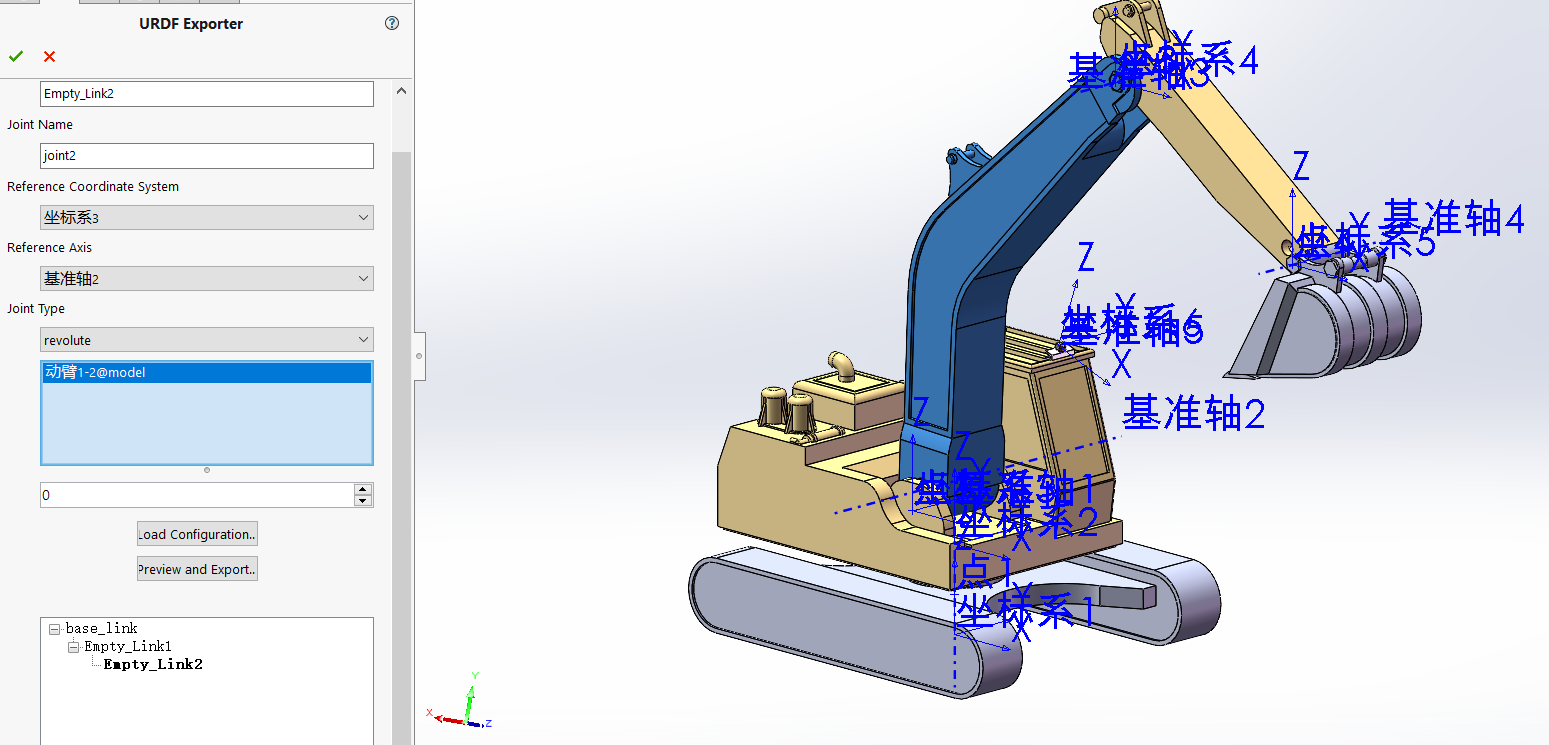
配置动臂
配置头杆
配置铲斗
配置传感器
4.配置完所有link后,点击“Preview and Export”选项
5.依次配置转动参数
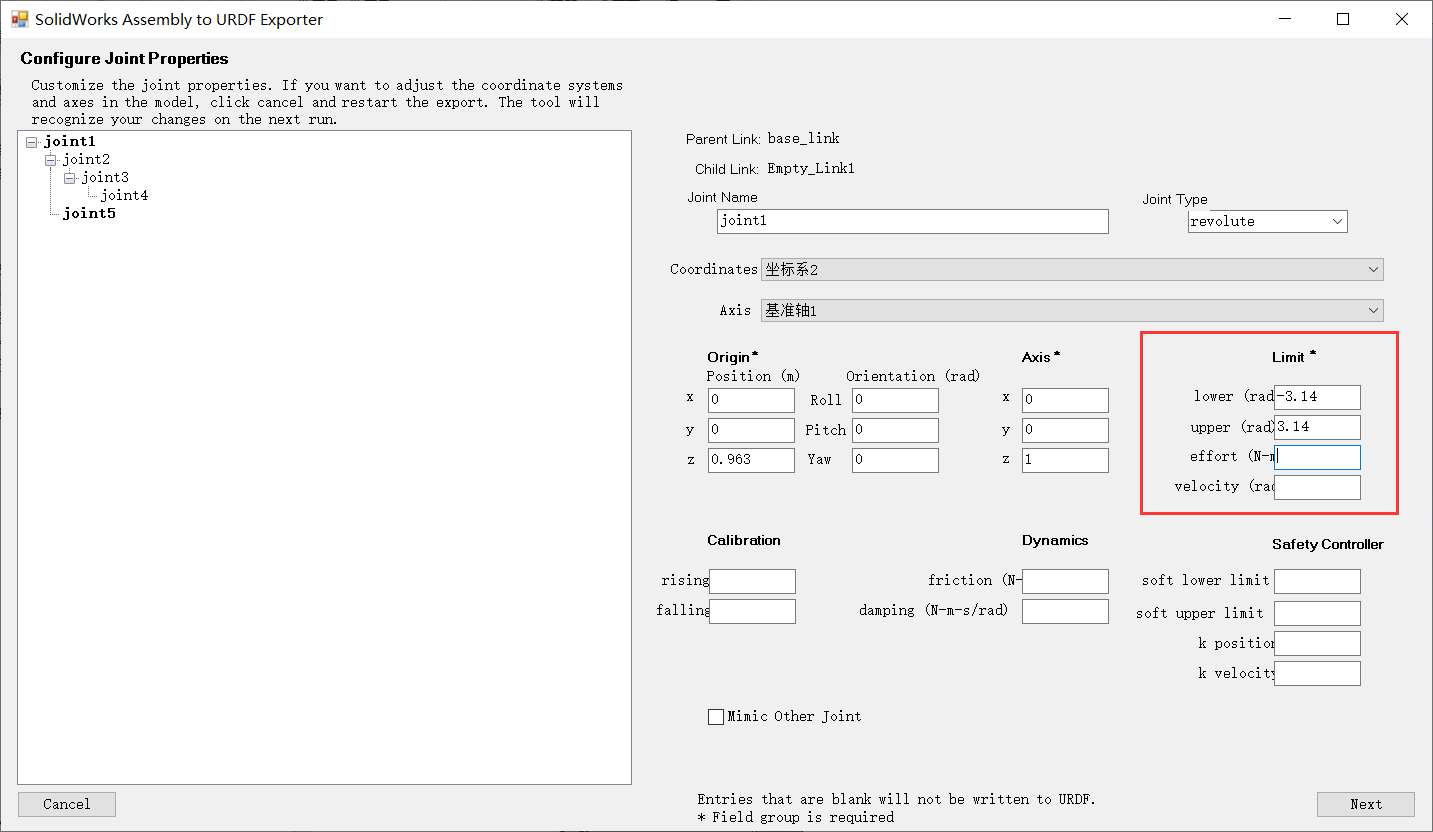
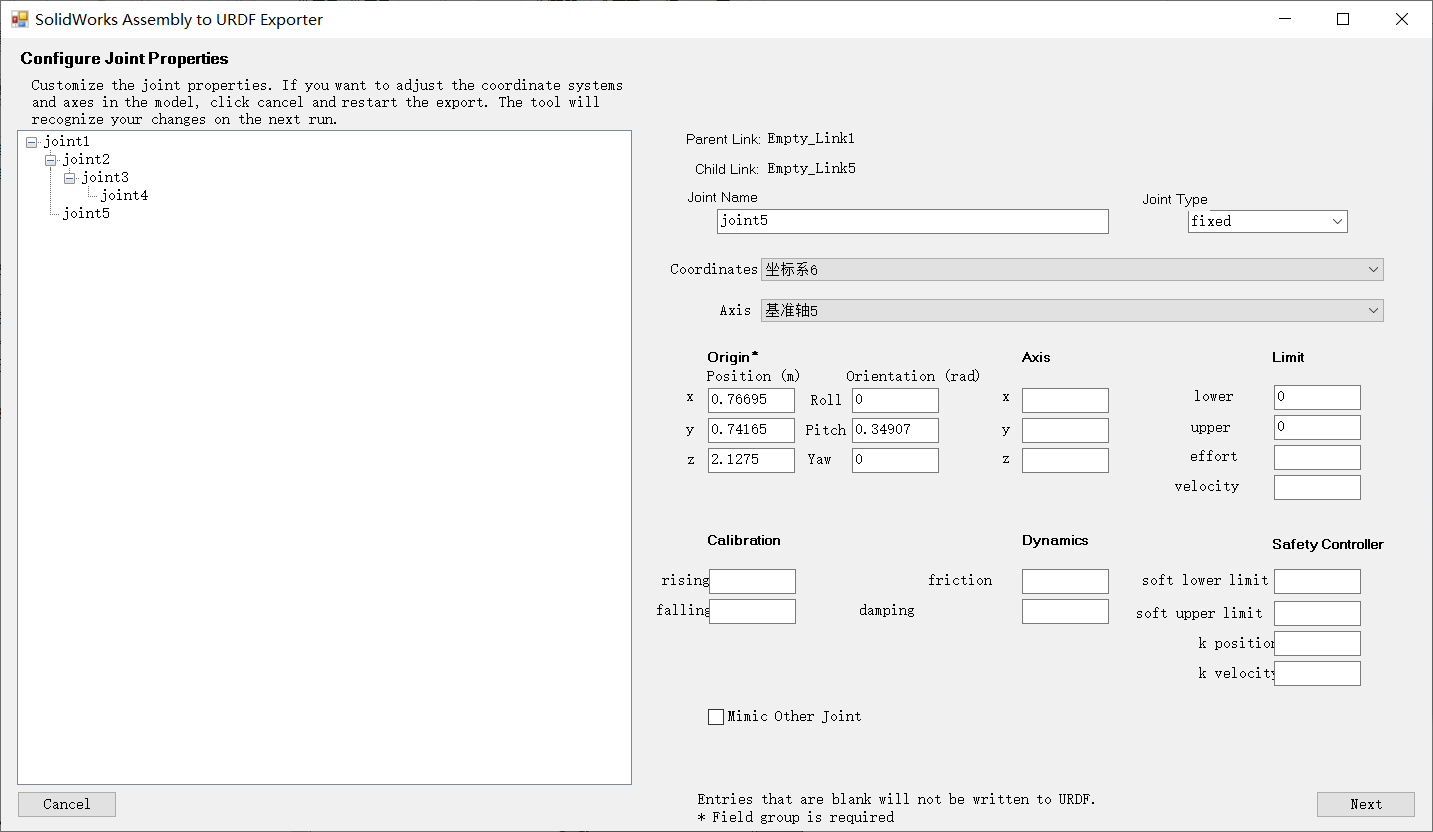
检查joint配置参数是否有问题,有问题的话可以在此处进行修改,没有问题点击“Next“。
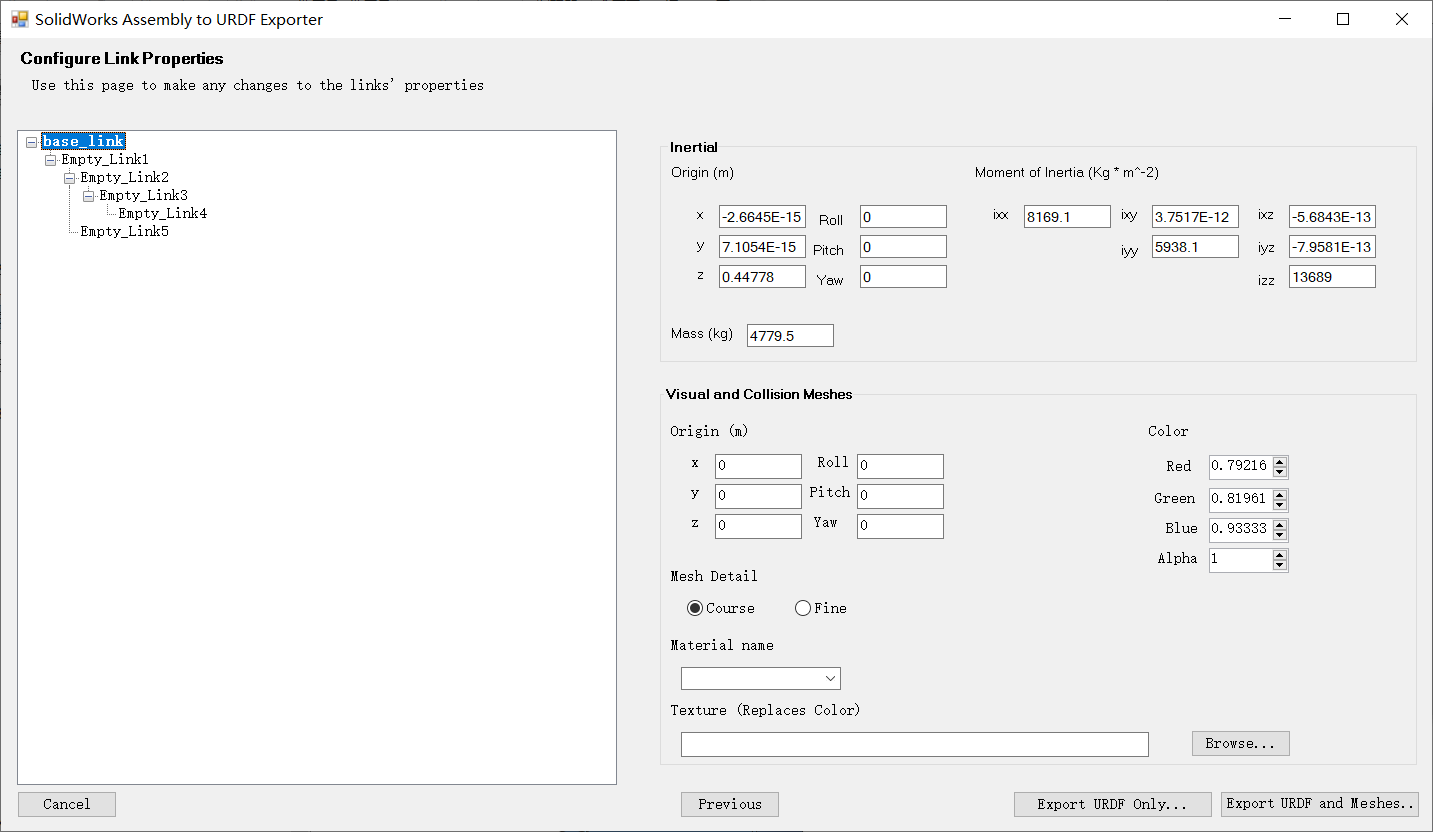
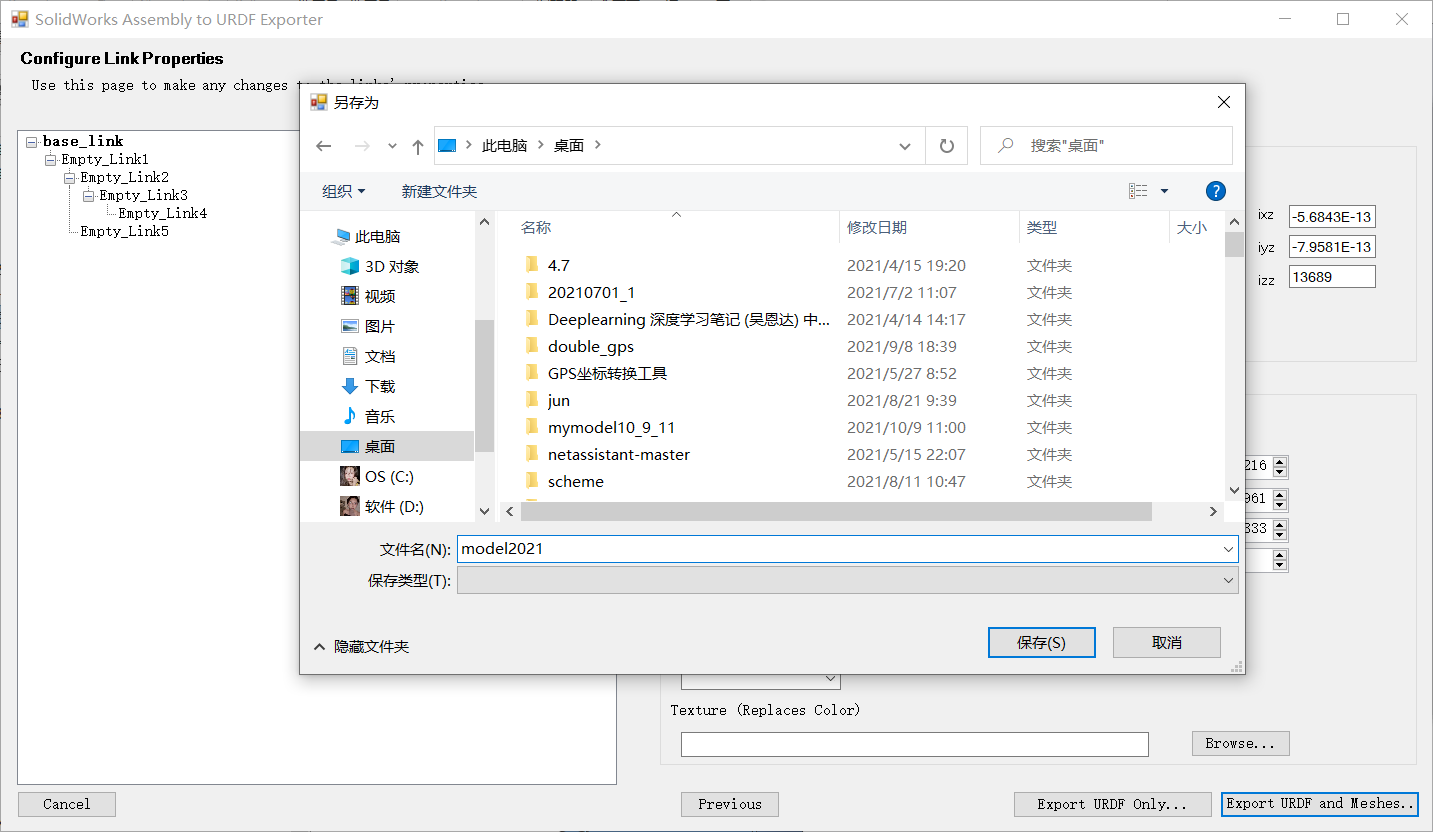
7.导出文件
检查link配置参数是否有问题,没有问题点击“Export URDF and Meshes”。选择路径对导出文件进行保存。
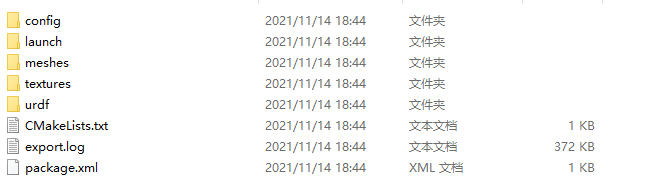
六、运行导出的文件
导出文件如下,其中urdf文件中为模型文件。
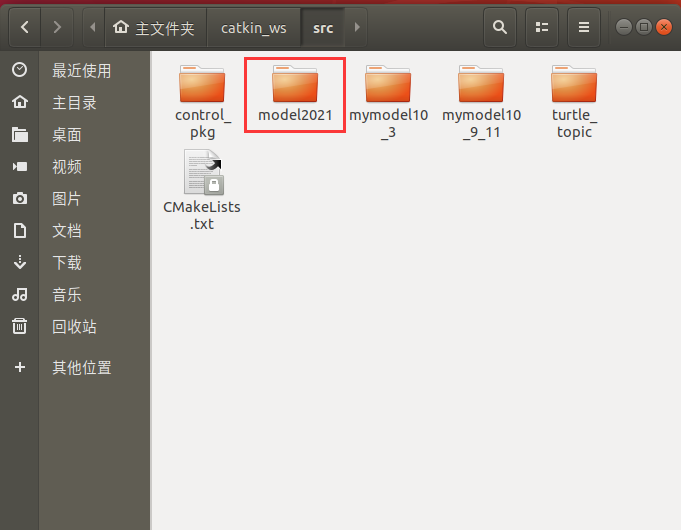
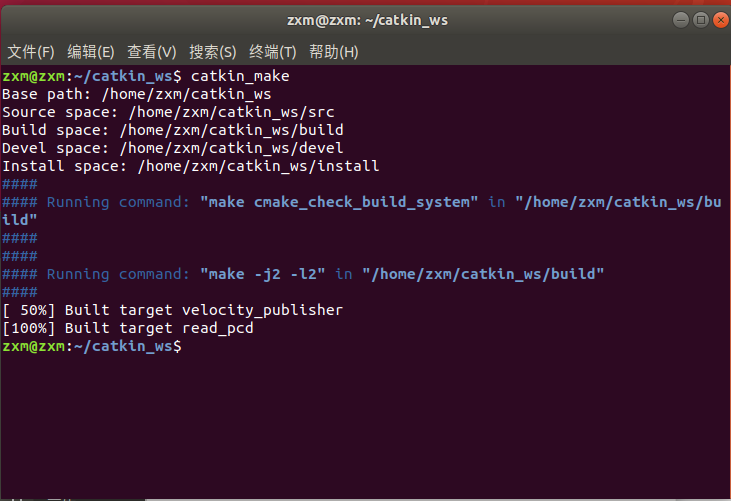
在Ubuntu中新建ROS功能包,将导出的文件放入src文件夹中,并进行编译
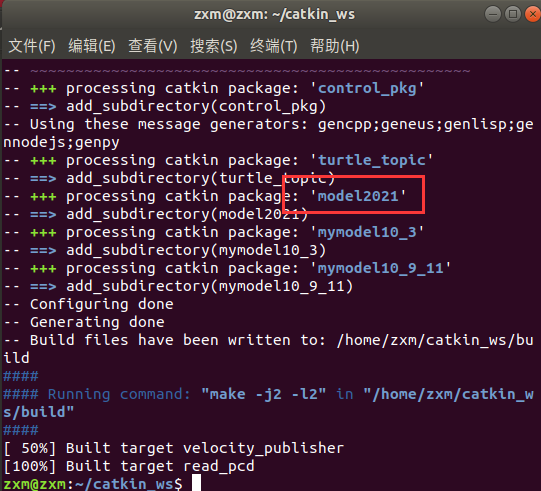
cmake编译的结果如下
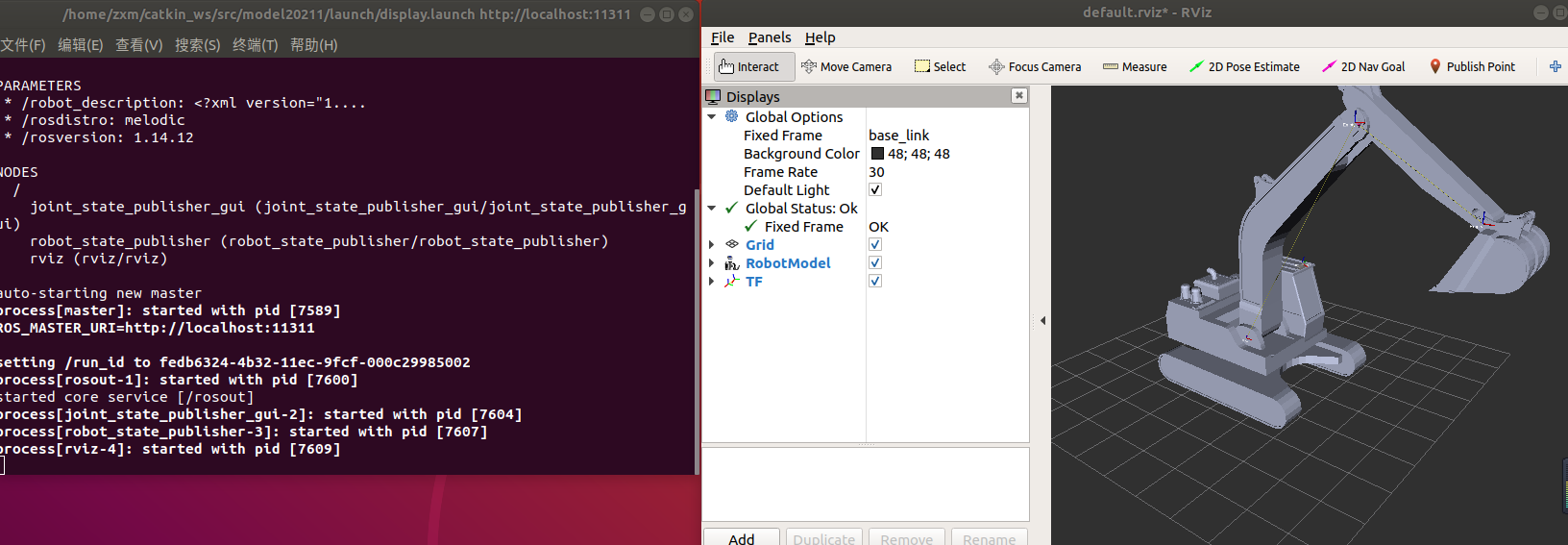
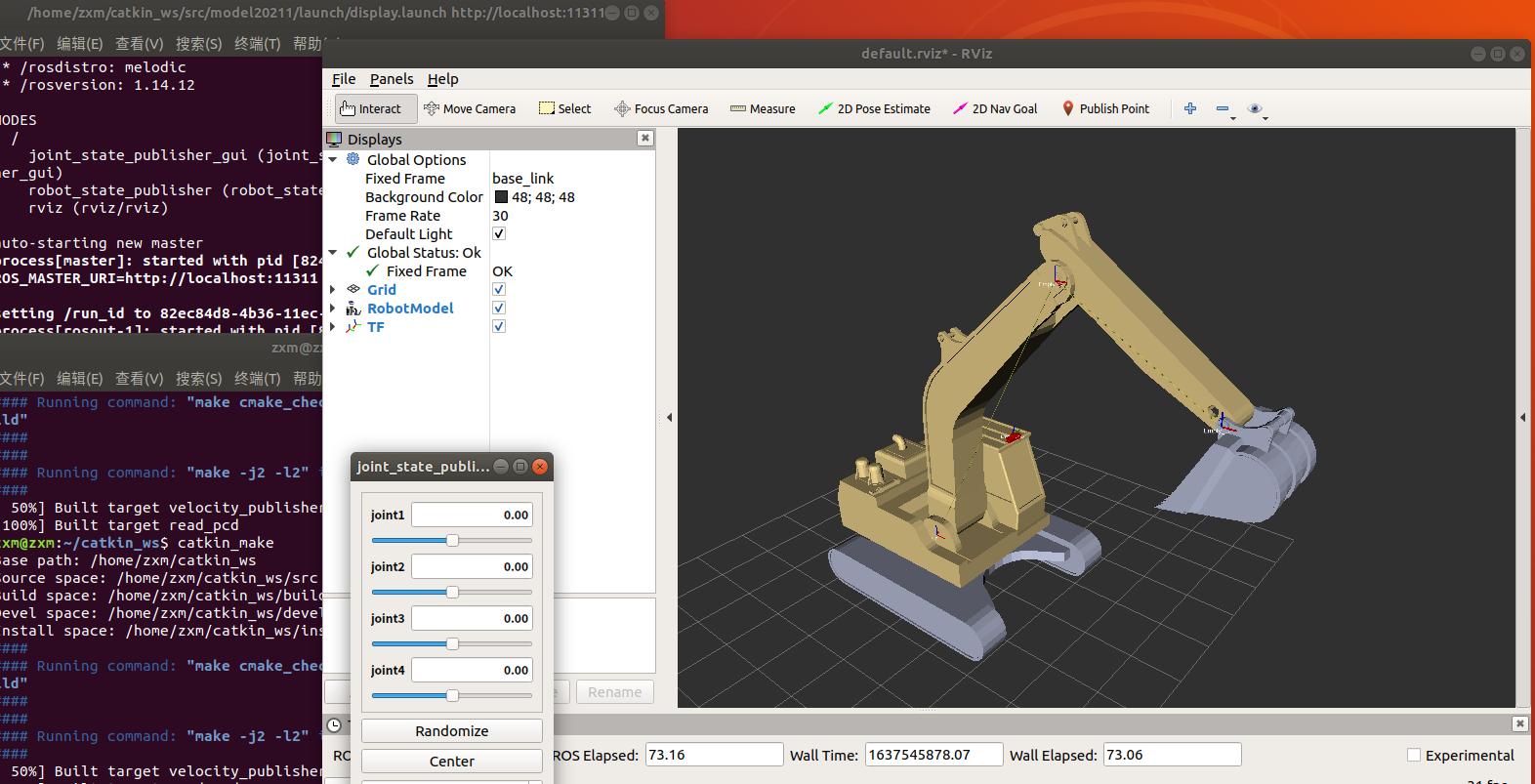
新建终端运行roslaunch model2021 display.launch
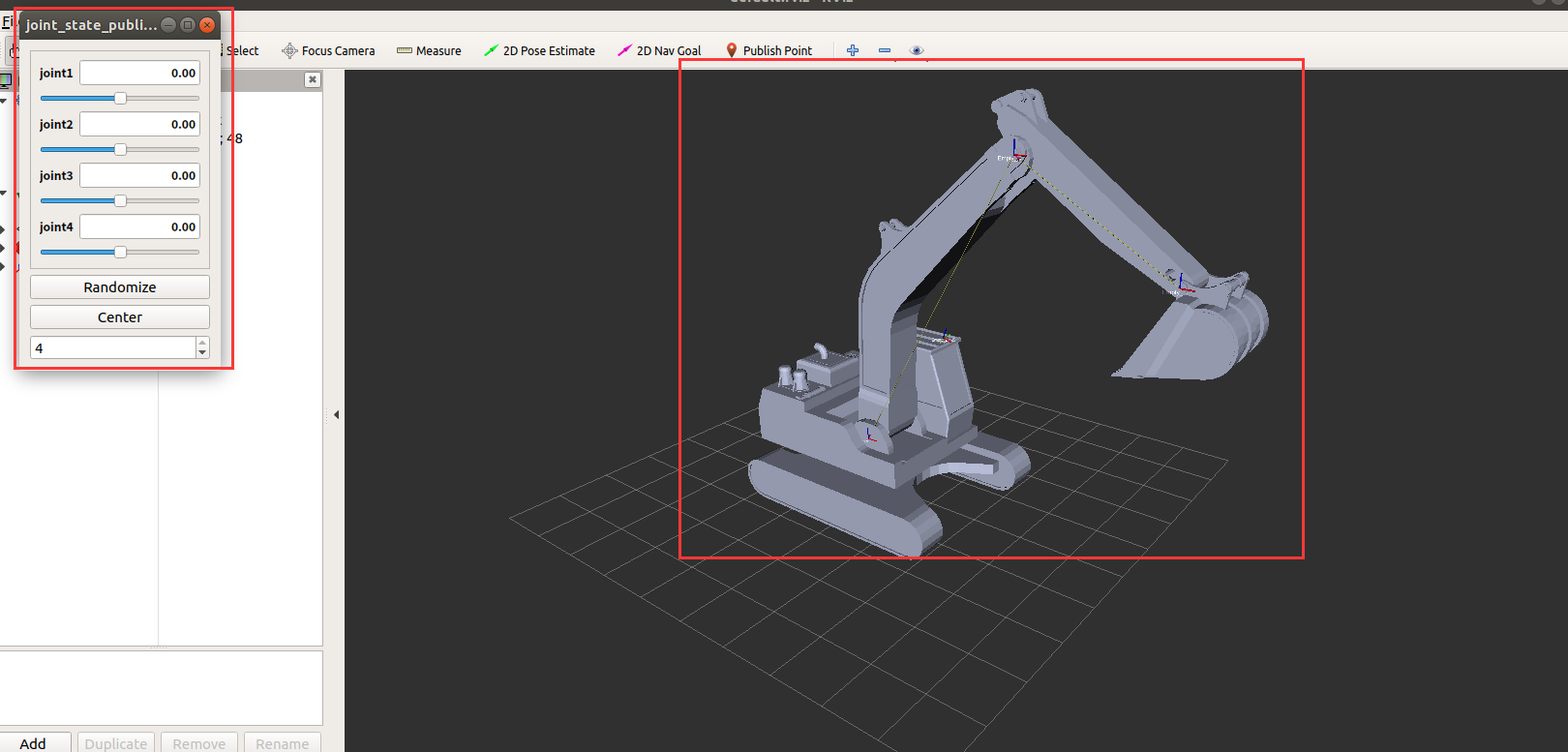
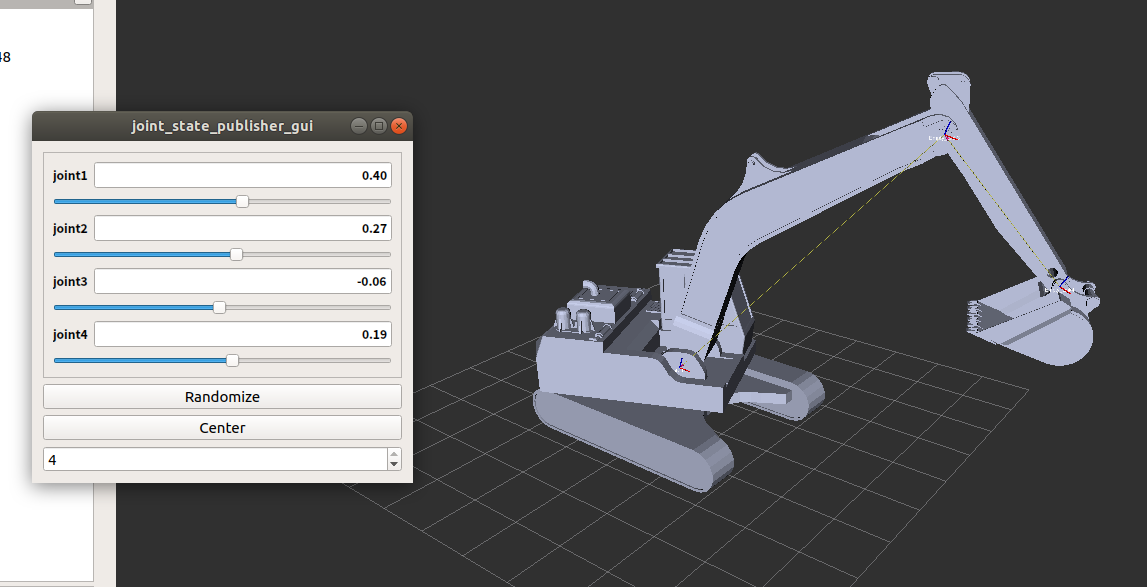
拖动滑动条可以转动设置的joint
七相关问题处理及其他补充说明
(1)—运行roslaunch model20211 display.launch时出现如下警告:

解决方法
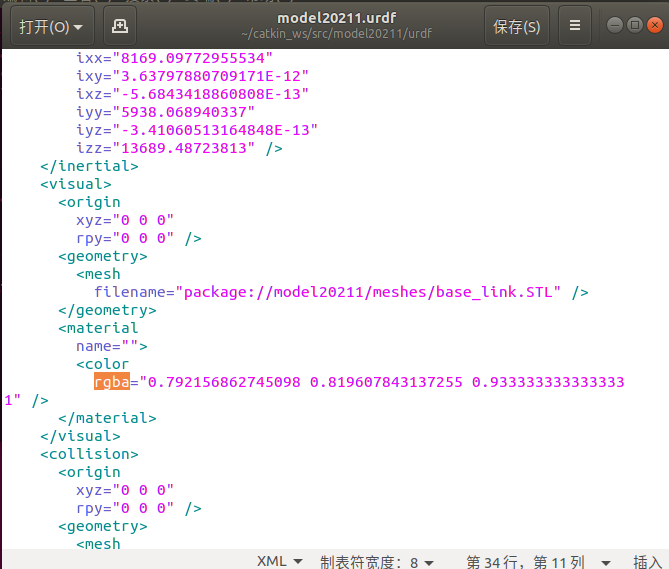
找到对应的urdf模型文件:
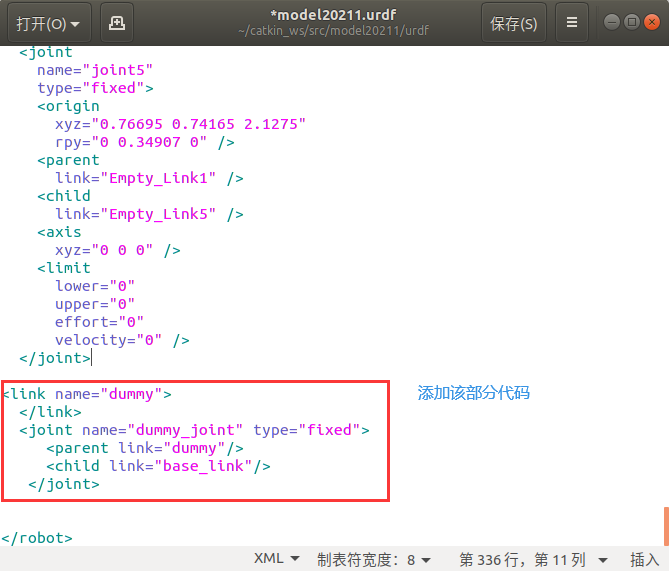
双击打开,在文件最后添加红色框里面的代码,点击保存:
重新编译:
新建终端重新运行roslaunch model20211 display.launch,可发现上述错误解决:
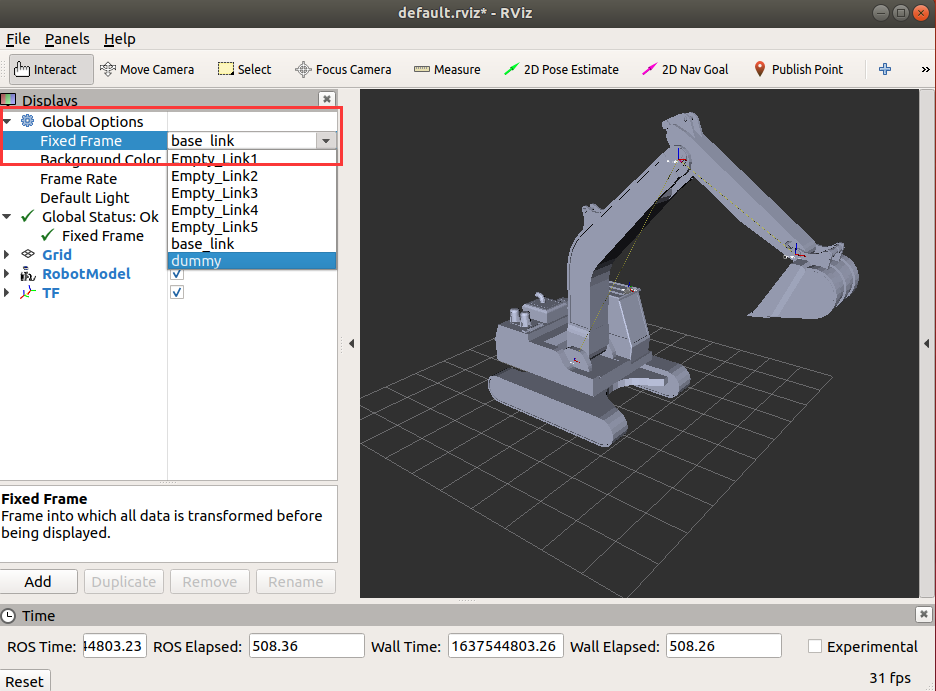
(2)—关于rviz中加载模型
Fixed Frame一定要选择base_link.
(3)—更改模型的颜色
不难发现,在SW中配置的模型颜色,在rviz中显示的时候全部变成了灰色,下面给出两幅对比图:
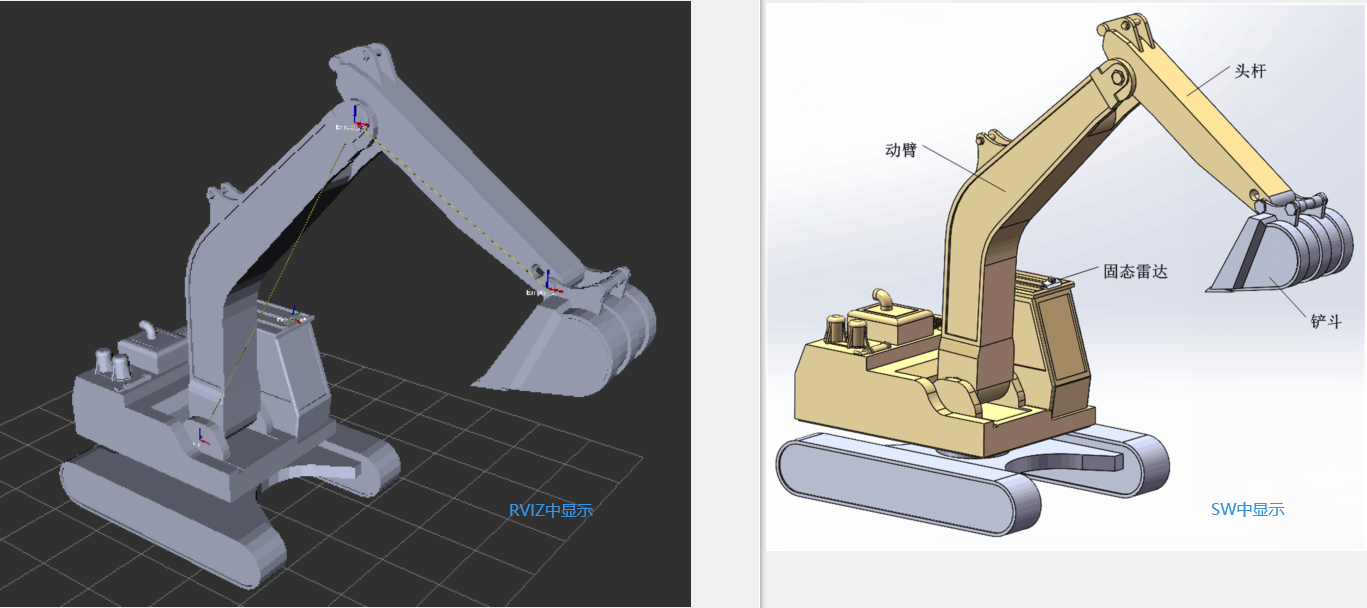
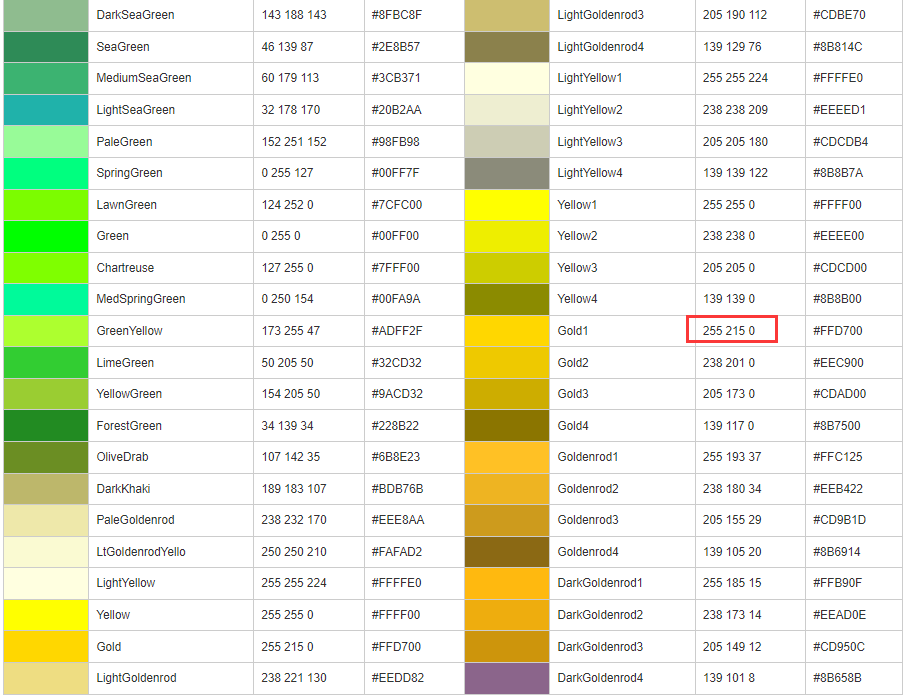
这是因为在SW中RGB的范围是【0-255】,而在rviz中RGB的范围是【0-1】,更改颜色的方法如下:
首先可以搜索RGB颜色对照表,找到对应的颜色,将数值除以255即可变为【0-1】的区间:
链接
然后打开模型文件,找到所有的rgba,更改rgb对应的数值即可,其中a代表透明度。
编译之后打开更改后的模型如下所示:
未完待续~~~~
最后
以上就是陶醉砖头最近收集整理的关于利用Solidworks2020将挖掘机装配体转换为URDF模型一、下载sw_urdf_exporter插件二、使用Solidworks绘制挖掘机三维模型三、创建每一个link的坐标系四、创建每一个joint的旋转轴五、打开插件进行配置(在URDF界面设置坐标系和旋转轴)六、运行导出的文件七相关问题处理及其他补充说明的全部内容,更多相关利用Solidworks2020将挖掘机装配体转换为URDF模型一、下载sw_urdf_exporter插件二、使用Solidworks绘制挖掘机三维模型三、创建每一个link内容请搜索靠谱客的其他文章。








发表评论 取消回复