moveit!
简书链接
moveit::planning_interface
moveit::planning_interface链接
https://www.guyuehome.com/435
学习笔记整理(古月居视频、书、博客)
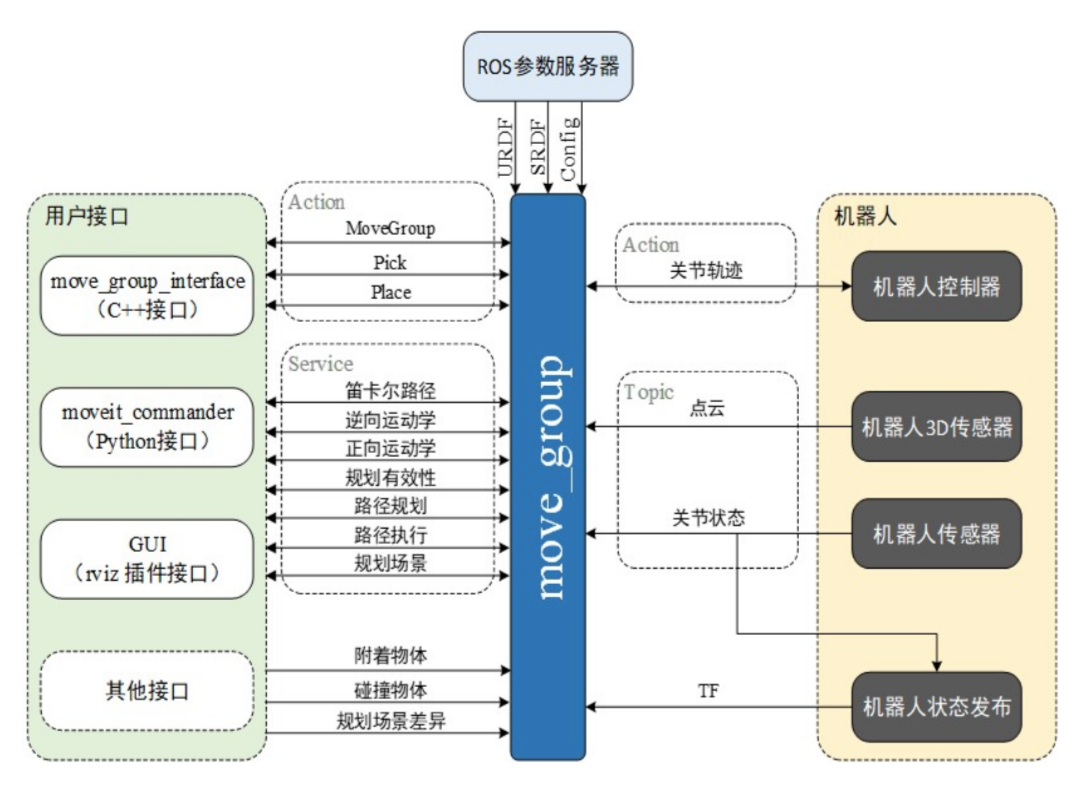
- moveit!接口编程流程:
- 连接控制器需要的规划组;
- 设置目标位姿(关节空间或笛卡尔空间);
- 设置运动约束(可选)(工作空间,关节姿态);
- 使用moveit!规划一条达到目标的轨迹;
- 修改轨迹(如速度等参数);
- 执行绘画出的轨迹;
官方API:
官方API介绍
1. 关节空间规划(正向运动求解):
#include <ros/ros.h>
#include <moveit/move_group_interface/move_group_interface.h>
int main(int argc, char **argv)
{
ros::init(argc, argv, "moveit_fk_demo");
ros::AsyncSpinner spinner(1);
spinner.start();
moveit::planning_interface::MoveGroupInterface arm("manipulator");
arm.setGoalJointTolerance(0.001);
arm.setMaxAccelerationScalingFactor(0.2);
arm.setMaxVelocityScalingFactor(0.2);
// 控制机械臂先回到初始化位置
arm.setNamedTarget("home");
arm.move();
sleep(1);
double targetPose[6] = {0.391410, -0.676384, -0.376217, 0.0, 1.052834, 0.454125};
std::vector<double> joint_group_positions(6);
joint_group_positions[0] = targetPose[0];
joint_group_positions[1] = targetPose[1];
joint_group_positions[2] = targetPose[2];
joint_group_positions[3] = targetPose[3];
joint_group_positions[4] = targetPose[4];
joint_group_positions[5] = targetPose[5];
arm.setJointValueTarget(joint_group_positions);
arm.move();
sleep(1);
// 控制机械臂先回到初始化位置
arm.setNamedTarget("home");
arm.move();
sleep(1)
ros::shutdown();
return 0;
}
2 . 工作空间规划(逆向运动求解):
#include <string>
#include <ros/ros.h>
#include <moveit/move_group_interface/move_group_interface.h>
int main(int argc, char **argv)
{
ros::init(argc, argv, "moveit_fk_demo");
ros::AsyncSpinner spinner(1);
spinner.start();
moveit::planning_interface::MoveGroupInterface arm("manipulator");
//获取终端link的名称
std::string end_effector_link = arm.getEndEffectorLink();
//设置目标位置所使用的参考坐标系
std::string reference_frame = "base_link";
arm.setPoseReferenceFrame(reference_frame);
//当运动规划失败后,允许重新规划
arm.allowReplanning(true);
//设置位置(单位:米)和姿态(单位:弧度)的允许误差
arm.setGoalPositionTolerance(0.001);
arm.setGoalOrientationTolerance(0.01);
//设置允许的最大速度和加速度
arm.setMaxAccelerationScalingFactor(0.2);
arm.setMaxVelocityScalingFactor(0.2);
// 控制机械臂先回到初始化位置
arm.setNamedTarget("home");
arm.move();
sleep(1);
// 设置机器人终端的目标位置
geometry_msgs::Pose target_pose;
target_pose.orientation.x = 0.70692;
target_pose.orientation.y = 0.0;
target_pose.orientation.z = 0.0;
target_pose.orientation.w = 0.70729;
target_pose.position.x = 0.2593;
target_pose.position.y = 0.0636;
target_pose.position.z = 0.1787;
// 设置机器臂当前的状态作为运动初始状态
arm.setStartStateToCurrentState();
arm.setPoseTarget(target_pose);
// 进行运动规划,计算机器人移动到目标的运动轨迹,此时只是计算出轨迹,并不会控制机械臂运动
moveit::planning_interface::MoveGroupInterface::Plan plan;
moveit::planning_interface::MoveItErrorCode success = arm.plan(plan);
ROS_INFO("Plan (pose goal) %s",success?"":"FAILED");
//让机械臂按照规划的轨迹开始运动。
if(success)
arm.execute(plan);
sleep(1);
// 控制机械臂先回到初始化位置
arm.setNamedTarget("home");
arm.move();
sleep(1);
ros::shutdown();
return 0;
}
3.笛卡尔空间规划:
#include <ros/ros.h>
#include <moveit/move_group_interface/move_group_interface.h>
#include <moveit/robot_trajectory/robot_trajectory.h>
int main(int argc, char **argv)
{
ros::init(argc, argv, "moveit_cartesian_demo");
ros::AsyncSpinner spinner(1);
spinner.start();
moveit::planning_interface::MoveGroupInterface arm("manipulator");
//获取终端link的名称
std::string end_effector_link = arm.getEndEffectorLink();
//设置目标位置所使用的参考坐标系
std::string reference_frame = "base_link";
arm.setPoseReferenceFrame(reference_frame);
//当运动规划失败后,允许重新规划
arm.allowReplanning(true);
//设置位置(单位:米)和姿态(单位:弧度)的允许误差
arm.setGoalPositionTolerance(0.001);
arm.setGoalOrientationTolerance(0.01);
//设置允许的最大速度和加速度
arm.setMaxAccelerationScalingFactor(0.2);
arm.setMaxVelocityScalingFactor(0.2);
// 控制机械臂先回到初始化位置
arm.setNamedTarget("home");
arm.move();
sleep(1);
// 获取当前位姿数据最为机械臂运动的起始位姿
geometry_msgs::Pose start_pose = arm.getCurrentPose(end_effector_link).pose;
std::vector<geometry_msgs::Pose> waypoints;
//将初始位姿加入路点列表
waypoints.push_back(start_pose);
start_pose.position.z -= 0.2;
waypoints.push_back(start_pose);
start_pose.position.x += 0.1;
waypoints.push_back(start_pose);
start_pose.position.y += 0.1;
waypoints.push_back(start_pose);
// 笛卡尔空间下的路径规划
moveit_msgs::RobotTrajectory trajectory;
const double jump_threshold = 0.0;
const double eef_step = 0.01;
double fraction = 0.0;
int maxtries = 100; //最大尝试规划次数
int attempts = 0; //已经尝试规划次数
while(fraction < 1.0 && attempts < maxtries)
{
fraction = arm.computeCartesianPath(waypoints, eef_step, jump_threshold, trajectory);
attempts++;
if(attempts % 10 == 0)
ROS_INFO("Still trying after %d attempts...", attempts);
}
if(fraction == 1)
{
ROS_INFO("Path computed successfully. Moving the arm.");
// 生成机械臂的运动规划数据
moveit::planning_interface::MoveGroupInterface::Plan plan;
plan.trajectory_ = trajectory;
// 执行运动
arm.execute(plan);
sleep(1);
}
else
{
ROS_INFO("Path planning failed with only %0.6f success after %d attempts.", fraction, maxtries);
}
// 控制机械臂先回到初始化位置
arm.setNamedTarget("home");
arm.move();
sleep(1);
ros::shutdown();
return 0;
}
约束
约束工作边界
req.workspace_parameters.min_corner.x = req.workspace_parameters.min_corner.y =
req.workspace_parameters.min_corner.z = -2.0;
req.workspace_parameters.max_corner.x = req.workspace_parameters.max_corner.y =
req.workspace_parameters.max_corner.z = 2.0;
关节约束
/* Let's create a new pose goal */
pose.pose.position.x = 0.32;
pose.pose.position.y = -0.25;
pose.pose.position.z = 0.65;
pose.pose.orientation.w = 1.0;
moveit_msgs::Constraints pose_goal_2 =
kinematic_constraints::constructGoalConstraints("panda_link8", pose, tolerance_pose, tolerance_angle);
/* Now, let's try to move to this new pose goal*/
req.goal_constraints.clear();
req.goal_constraints.push_back(pose_goal_2);
/* 对关节施加约束
Here, we are asking for the end-effector to stay level*/
geometry_msgs::QuaternionStamped quaternion;
quaternion.header.frame_id = "panda_link0";
quaternion.quaternion.w = 1.0;
req.path_constraints = kinematic_constraints::constructGoalConstraints("panda_link8", quaternion);
场景避障
古月居博客碰撞检测链接
在场景中生成障碍物
// 包含API的头文件
#include <moveit/move_group_interface/move_group.h>
#include <moveit/planning_scene_interface/planning_scene_interface.h>
#include <moveit_msgs/AttachedCollisionObject.h>
#include <moveit_msgs/CollisionObject.h>
int main(int argc, char **argv)
{
ros::init(argc, argv, "add_collision_objct");
ros::NodeHandle nh;
ros::AsyncSpinner spin(1);
spin.start();
// 创建运动规划的情景,等待创建完成
moveit::planning_interface::PlanningSceneInterface current_scene;
sleep(5.0);
// 声明一个障碍物的实例,并且为其设置一个id,方便对其进行操作,该实例会发布到当前的情景实例中
moveit_msgs::CollisionObject cylinder;
cylinder.id = "seven_dof_arm_cylinder";
// 设置障碍物的外形、尺寸等属性
shape_msgs::SolidPrimitive primitive;
primitive.type = primitive.CYLINDER;
primitive.dimensions.resize(3);
primitive.dimensions[0] = 0.6;
primitive.dimensions[1] = 0.2;
// 设置障碍物的位置
geometry_msgs::Pose pose;
pose.orientation.w = 1.0;
pose.position.x = 0.0;
pose.position.y = -0.4;
pose.position.z = 0.4;
// 将障碍物的属性、位置加入到障碍物的实例中
cylinder.primitives.push_back(primitive);
cylinder.primitive_poses.push_back(pose);
cylinder.operation = cylinder.ADD;
// 创建一个障碍物的列表,把之前创建的障碍物实例加入其中
std::vector<moveit_msgs::CollisionObject> collision_objects;
collision_objects.push_back(cylinder);
// 所有障碍物加入列表后(这里只有一个障碍物),再把障碍物加入到当前的情景中,如果要删除障碍物,使用removeCollisionObjects(collision_objects)
current_scene.addCollisionObjects(collision_objects);
ros::shutdown();
return 0;
}
最后
以上就是糟糕流沙最近收集整理的关于moveit!- moveit!接口编程流程:的全部内容,更多相关moveit!-内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。



![[neotic-moveit] 子坐标系框架 Subframes](https://www.shuijiaxian.com/files_image/reation/bcimg23.png)




发表评论 取消回复