(后期声明:想要完整源码的)由于跳槽,而且这些操作本就属于伪科研,当时也没心思备份,代码不可能有了。如果你真的上道,我之前的文章也已经说得差不多了。
室内一张截图:
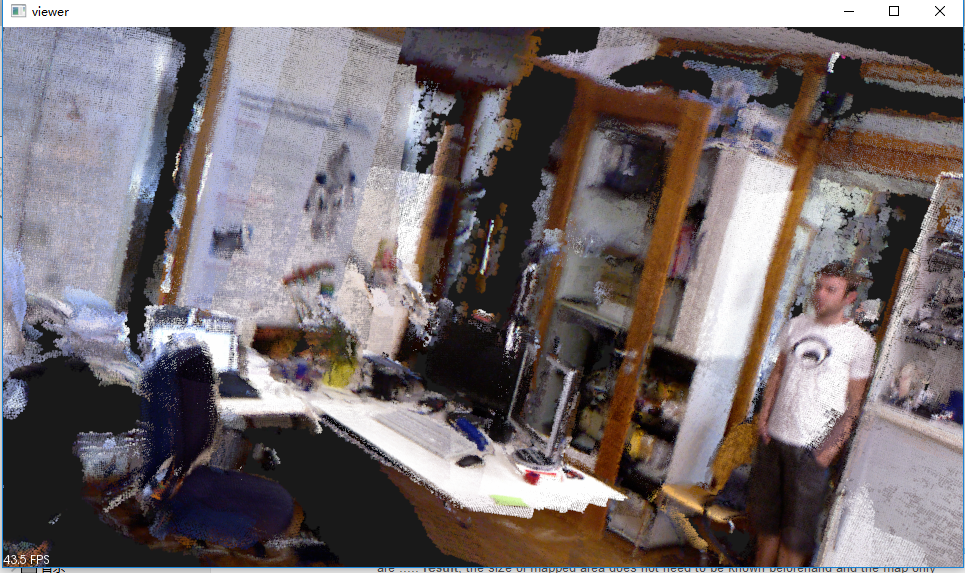
在重复扫描的地方精度不错,这个看起来有点差。。其实精度挺好的。
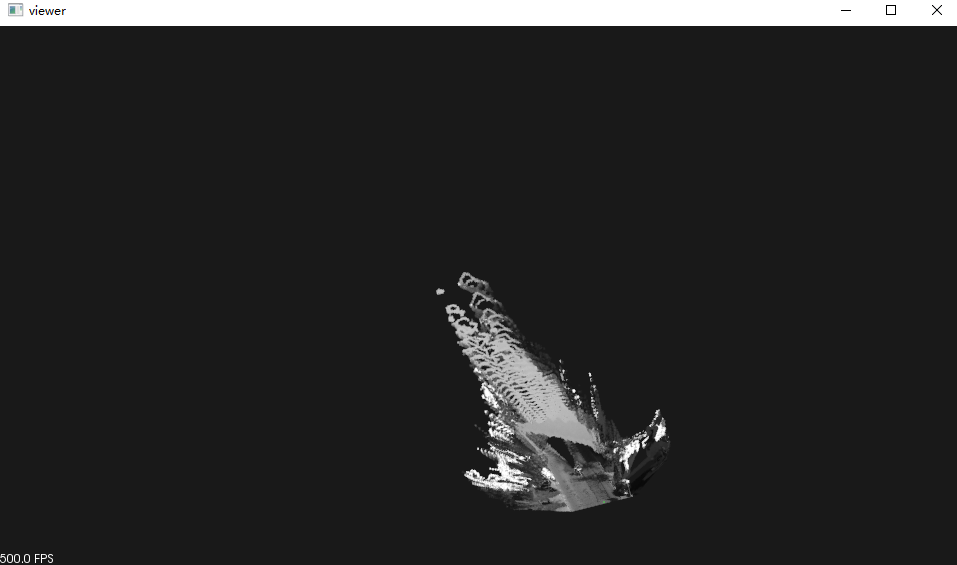
单张双目重建:
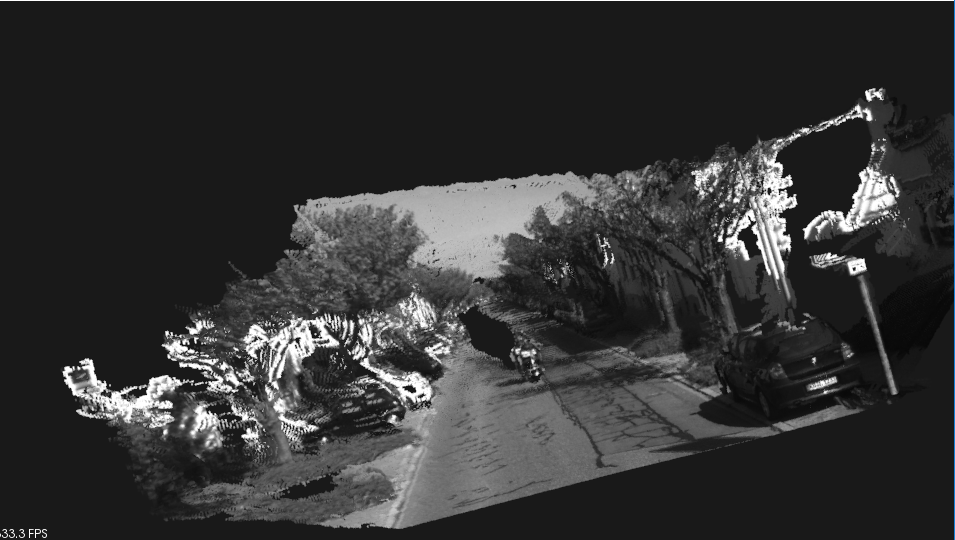
这个其实没看起来那么好,因为很多错误点待截掉,只是角度好。从上方看来是这样的:
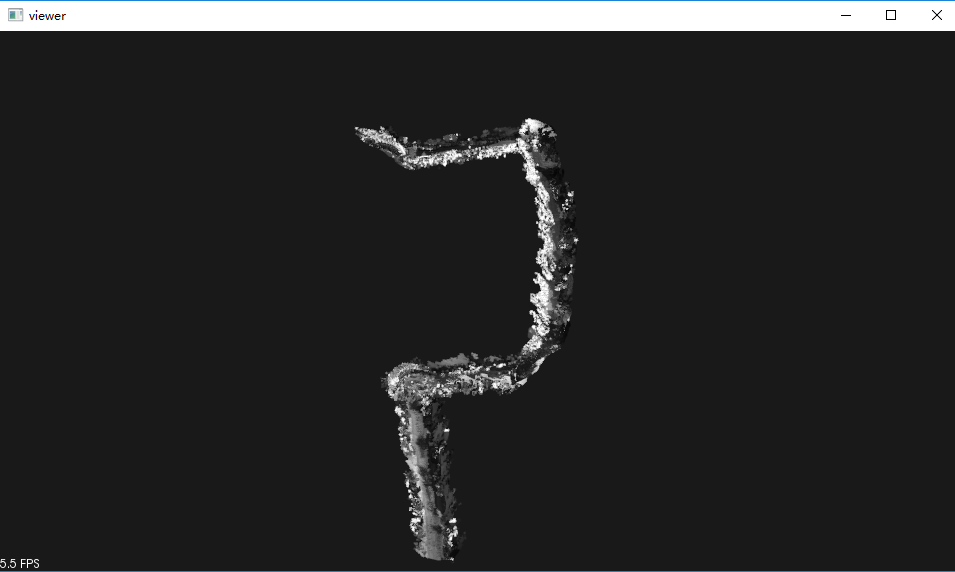
点云融合后,精度较差,1-5米,不能近看,远处看看轨迹还可以。当然,LIBILAS主页上(需翻墙才有视频)展示了精度非常好的重建,不知是怎样做的,或者是不是激光数据。
融合后:
最后
以上就是专注方盒最近收集整理的关于ORB-SLAM2稠密点云重建:最终效果与点评的全部内容,更多相关ORB-SLAM2稠密点云重建内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复