关于纯定位模式呢,本人试过2d和3d,怎么说呢,有条件的话,建议直接上3d,因为博主当初在做定位时针对室内和室外都尝试过,2d只在室内环境下效果会很棒,但是在室外就呵呵啦!所以这里直接讲解3d室外定位(建图篇请自己查看我之前的博客:3d建图
看了我之前的博客大概知道配置文件和源文件路径了,我这里就不把路径写出来了,挺麻烦的。直接讲怎么做把,有不懂的留言,看到了我一定知无不言。
-
首先,保存地图
利用之前建好的3d地图,地图格式为map.pbstream的统一格式。不熟悉保存方法的看我之前的博客。3d建图,这里直接跳过。
-
第二步,.lua文件的配置(在纯定位时用到的这个文件和建图时文件内容相同,可跳过不看)
首先,进入配置文件夹里的configuration_files文件夹,新建my_robot_3d.lua文件(你可以复制原本的backpack_3d.lua,然后修改内容).我的文件内容如下:
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "imu",
published_frame = "lidar_mid",
odom_frame = "odom",
provide_odom_frame = false,
publish_frame_projected_to_2d = false,
use_pose_extrapolator = false,
use_odometry = false,
use_nav_sat = false,#这里选择是否用GPS,博主的图建出来效果不错,定位也可以,后面也尝试了加入GPS建图定位,很nice
use_landmarks = false,
num_laser_scans = 0,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 1,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
TRAJECTORY_BUILDER_3D.num_accumulated_range_data = 1
MAP_BUILDER.use_trajectory_builder_3d = true
MAP_BUILDER.num_background_threads = 7
POSE_GRAPH.optimization_problem.huber_scale = 5e2
POSE_GRAPH.optimize_every_n_nodes = 320
POSE_GRAPH.constraint_builder.sampling_ratio = 0.03
POSE_GRAPH.optimization_problem.ceres_solver_options.max_num_iterations = 10
POSE_GRAPH.constraint_builder.min_score = 0.62
POSE_GRAPH.constraint_builder.global_localization_min_score = 0.66
return options
保存退出到同级目录中,进入urdf文件夹,检查minibus.urdf文件,定位会用到坐标系转换,所以这个文件也是需要的。只要雷达不动,这个文件就不能改动。
3. 第三步,重要文件配置,纯定位接口
文件路径(这里是配置文件路径,改完后需要在源文件路径里找到相同的文件进行修改)
{HOME}/catkin_cartographer/install_isolated/share/cartographer_ros/configuration_files/backpack_3d_localization.lua
文件内容:
include "my_robot_3d.lua"
TRAJECTORY_BUILDER.pure_localization_trimmer = {
max_submaps_to_keep = 6,//最大保存子图数,存定位模式通过子图进行定位,但只需要当前和上一个子图即可,我这里设置的是6
}
POSE_GRAPH.optimize_every_n_nodes = 100//每100个有效帧一个子图,子图构建完成要闭环检测一次,这个数越小,闭环检测越频繁,当然CPU爆炸
return options
4.纯定位API接口launch文件配置(配置文件和源文件要同步)
路径是:
{HOME}/catkin_cartographer/install_isolated/share/cartographer_ros/launch/demo_backpack_3d_localization.launch
内容是;
<launch>
<param name="/use_sim_time" value="false" />
<param name="robot_description"
textfile="$(find cartographer_ros)/urdf/minibus.urdf" />
<node name="robot_state_publisher" pkg="robot_state_publisher"
type="robot_state_publisher" />
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename backpack_3d_localization.lua
-load_state_filename $(arg load_state_filename)"
output="screen">
<remap from="points2" to="/minibus/front/lslidar_point_cloud" />
<!--
<remap from="points2_1" to="horizontal_laser_3d" />
<remap from="points2_2" to="vertical_laser_3d" />
-->
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/demo_3d.rviz" />
</launch>
5.修改文件occupancy_node_main.cc
这个文件在路径:
/home/heng/catkin_cartographer/src/cartographer_ros/cartographer_ros/cartographer_ros/occupancy_grid_node_main.cc
第171行或者直接搜索下面这行代码:
//occupancy_grid_publisher_.publish(*msg_ptr);
注释掉这行代码,不然你纯定位过程建立的子图会覆盖在之前建好的地图上。
6.检查配置文件和源文件两个文件夹里做了相同的配置之后,保存退出到工作空间路径:
cd ~
cd ~/catkin_cartographer/
catkin_make_isolated --install --use-ninja
source devel_isolated/setup.bash
- 仿真测试:
cd ~/catkin_cartographer/
source devel_isolated/setup.bash
roslaunch cartographer_ros demo_backpack_3d_localization.launch load_state_filename:={HOME}/Downloads/mymap.pbstream
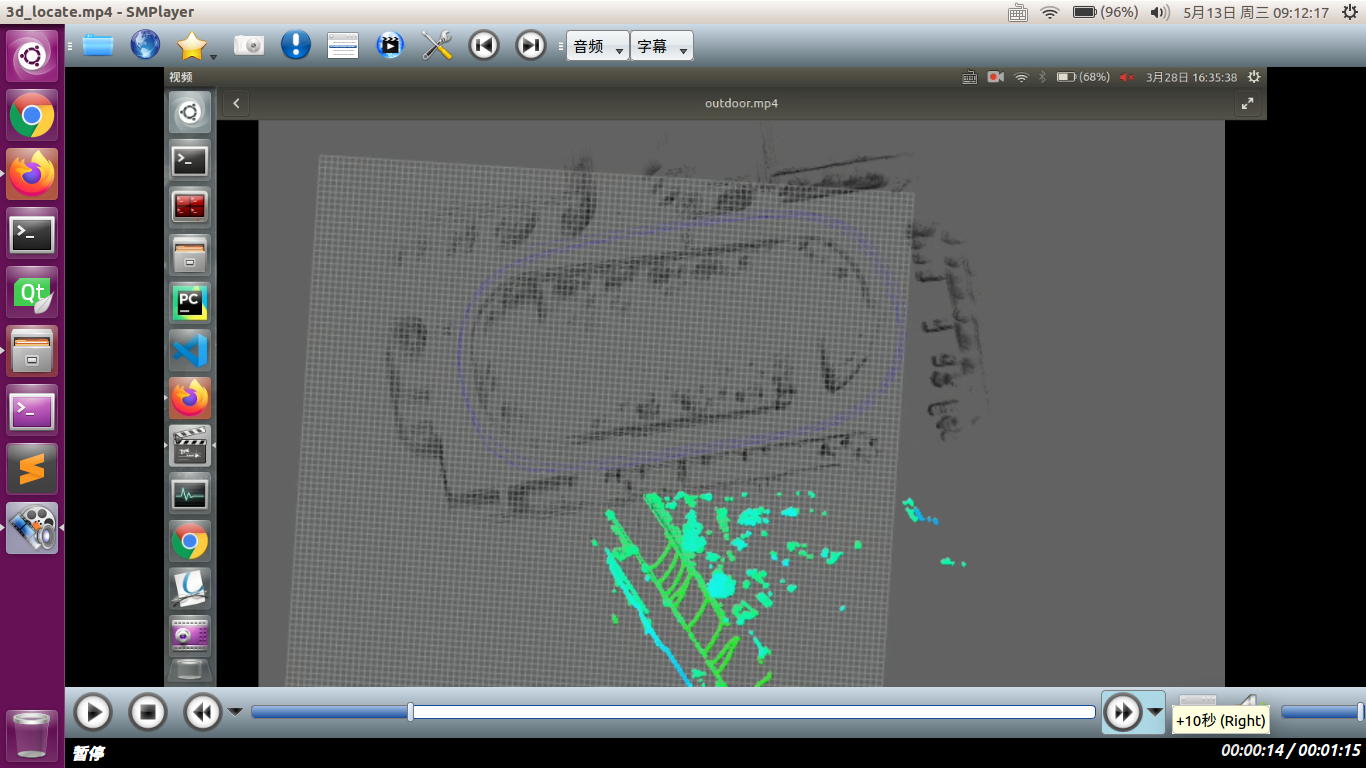
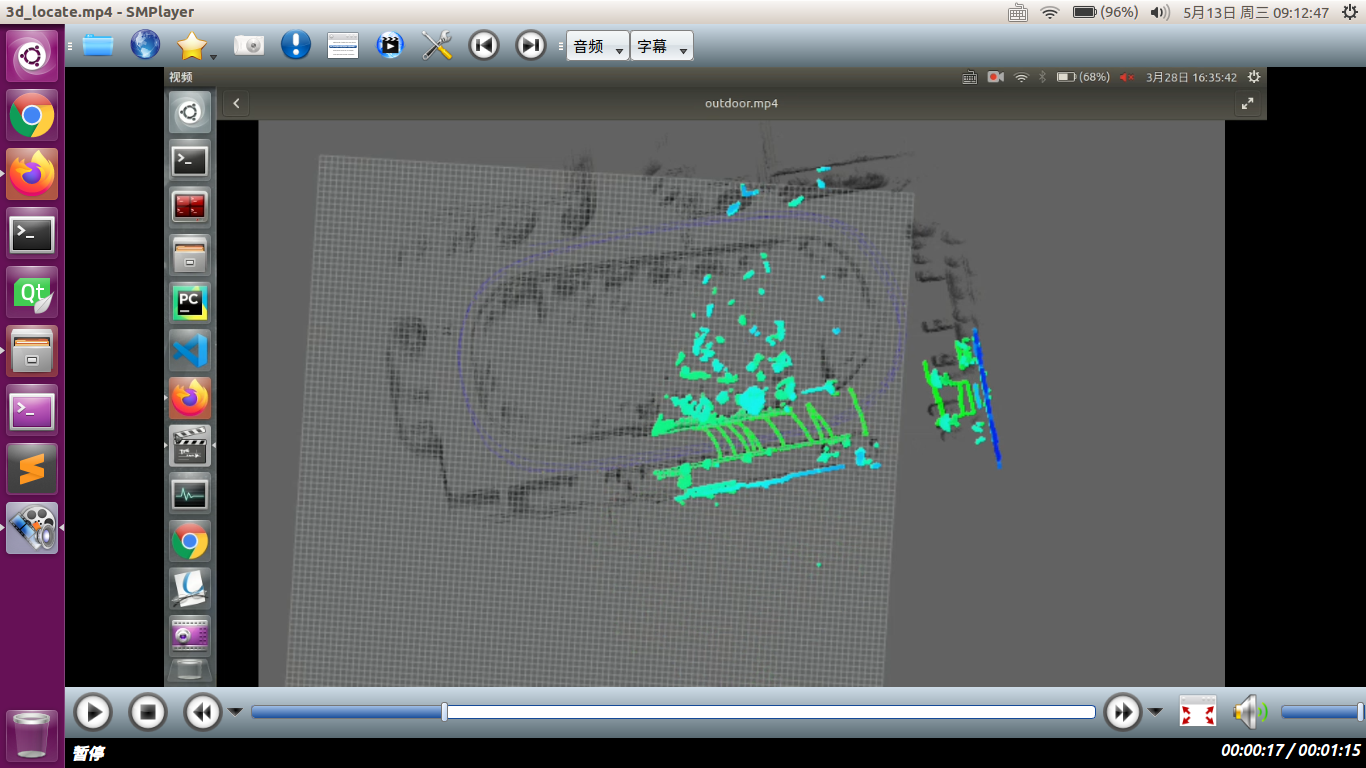
这是最终效果,博主是实车测试的,所以只有地图没有数据包,各位可以照着配置进行尝试。当时无人车并未动,3d定位大概花了20s左后就自己定好了位。博主不会插入动图,也不会插入视频,所以把定位好的视频上传到百度云里了,可以自定下载然后看效果
链接: https://pan.baidu.com/s/1PptoGorj8AvRCMtBNozsuA 提取码: yhr8
为了直观,我还是放两张截图吧!在开始定位时,绿色为当前雷达数据,黑色部分为之前建好的地图。
最后
以上就是暴躁跳跳糖最近收集整理的关于cartographer基于3d地图的纯定位模式的全部内容,更多相关cartographer基于3d地图内容请搜索靠谱客的其他文章。








发表评论 取消回复