松灵课堂 | SCOUT的仿真使用
想必大家在机器人开发验证的过程中会遇到很多问题,比如说场地问题:在办公室写好了算法,却不能马上找到场地进行测试验证;又比如说千辛万苦找到了场地,但测试结果却和算法的不一致。为了解决这些问题,我们在原来的SDK、ROS Package的基础上,新增了Gazebo和Webos的仿真特性,方便大家在虚拟的环境下验证自己的算法。本次小课堂将以SCOUT为例子,给大家讲解仿真环境的介绍、构建以及使用方法。

仿真环境的介绍
Gazebo
Gazebo是一款3D动态模拟器,能够在复杂的室内和室外环境中准确有效地模拟机器人群。与游戏引擎提供高保真度的视觉模拟类似,Gazebo提供高保真度的物理模拟,其提供一整套传感器模型,以及对用户和程序非常友好的交互方式。可以用于测试机器人算法、设计机器人、现实场景进行回归测试等。Gazebo的主要特征有包含多个物理引擎、包含丰富的机器人模型和环境库、包含各种各样的传感器、程序设计方便和具有简单的图形界面。

WEBOTS
虽然Gazebo功能很强大,然而对于大多数刚入门的新手来说,使用Gazebo仿真的时候各种参数的配置简直让人头疼,一不小心终端就是一片“爆红”!所以今天就给大家推荐另外一款机器人仿真软件——Webots。它可以支持C/C++、Python、MATLAB、Java、ROS和TCP/IP等多种方式实现模型的仿真控制。不仅如此它还内置了50多种机器人模型,涵盖了人形机器人、移动机器人、单臂移动机器人、双臂移动机器人、爬行机器人、机械臂、无人机等等,其中就包括大家比较熟悉的Boston Dynamics Atlas、DJI Mavic 2 PRO、Nao、PR2、YouBot、UR、Turtlebot3 Burger等机器人。

仿真环境构建
Gazebo的安装
1.在安装ROS的时候,如果是选择Desktop-Full安装,系统就已经帮你装好了gazebo.如果有需要其他模型,可以下载gazebo的模型库。
Git clone git@github.com:osrf/gazebo_models.git
2.之后把得到的gazebo_models文件夹复制到/usr/share/gazebo-7,并修改名称为models
sudo mv gazebo_models/ /usr/local/share/gazebo-7
sudo mv gazebo_models/ models/
3、测试安装是否成功
新建终端,输入gazebo,打开下图表示成功安装:
Webots的安装
1.到官网 (https://cyberbotics.com/ )下载安装包。
2.安装webots的ROS包。
sudo apt install ros-melodic-webots-ros
3.添加webots的环境变量到.bashrc文件中的最后一行。
sudo gedit ~/.bashrc
export WEBOTS_HOME=/usr/local/webots
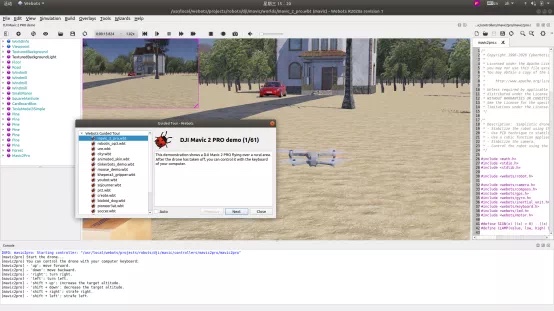
4.测试是否安装成功
新建终端输入webots,看到以下画面表示安装成功
仿真的使用
SCOUT ROS Package的下载与编译
● 安装ROS的依赖项
sudo apt install ros-melodic-teleop-twist-keyboard
sudo apt-get install ros-melodic-joint-state-publisher-gui
sudo apt install ros-melodic-ros-controllers
● 将SCOUT ROS Package 克隆到本地工作空间
git clone https://github.com/agilexrobotics/scout_ros.git
● 编译SCOUT ROS Package
cd …
catkin_make
1.启动webots的仿真节点(其中SCOUT的模型我们已经构建好了,不需要客户自行构建,其中物理参数我们也适配好了,尽可能的让仿真与现实接近)
roslaunch scout_bringup scout_base_webots_sim.launch
2.启动gazebo的仿真节点
roslaunch scout_bringup scout_base_gazebo_sim.launch
3.启动键盘控制节点
roslaunch scout_bringup scout_teleop_keyboard.launch
这节课的内容主要展示了如何使用在仿真环境中控制小车,方便在大家在虚拟环境下验证自己的算法。下节课,我们会进行scout_ros代码分析教学。
Q&A





 活动征集
活动征集

最后
以上就是单薄书本最近收集整理的关于松灵课堂 | SCOUT的仿真使用的全部内容,更多相关松灵课堂内容请搜索靠谱客的其他文章。








发表评论 取消回复