Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion
1、Motivation
本期带来的是一篇2021年CVPR接收的一篇关于点云语义分割的文章。本文的核心出发点是,认为目前设备获取的点云信息过剩,而现有方法却不能很好的利用这些信息。
2、目的
针对点云语义分割任务,识别真实点云场景中每个点的语义标签。
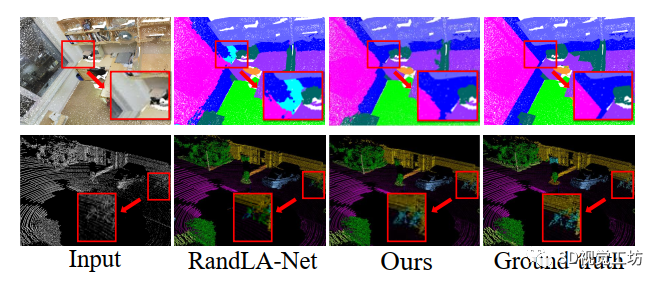
图1 点云场景的语义分割示例
3、引言
真实的点云场景通常包含非常复杂的环境,加上3D数据所具有的原始几何属性,针对点云的详细信息分析对于机器感知来说往往非常具有挑战性。随着3D获取技术的发展,获取到的点云信息愈加完善,但对这些信息的利用率远远不够,因此对点云信息的分析十分重要。尽管有许多经典的方法涉及具有简单结构的2D图像的语义分割,但是点云在3D空间中具有离散性、无序且分布不均匀的特点,这使得3D点云语义分割任务更具挑战性,特别是对于从现实世界中采集的由数百万甚至数亿个点组成的大型场景。
当然,这其中还会包括一些其他问题。例如在邻域构建过程中,邻域之间的噪点和重叠是很难避免的,往往会产生歧义;冗余特征的处理,导致网络框架的前处理和后处理非常耗时;再比如不充分的全局表达,会导致采样阶段破坏全局的信息表达等等问题。
最后
以上就是奋斗宝贝最近收集整理的关于CVPR2021|基于双边扩充和自适应融合方法的点云语义分割网络的全部内容,更多相关CVPR2021|基于双边扩充和自适应融合方法内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。

![[Unity&]缺少引用空间Utility的解决办法](https://www.shuijiaxian.com/files_image/reation/bcimg19.png)






发表评论 取消回复