作者丨Horizon
来源丨地平线HorizonRobotics
摘要:
点云感知算法是安全鲁棒的自动驾驶系统中尤为重要的一环。在CVPR 2022上,地平线-华中科技大学计算机视觉联合实验室发表了研究成果Azimuth Normalization——以点云特有的径向对称性作为先验,对数据归一化,降低从点云中获取信息的难度。该归一化方法能与大多数感知算法结合,降低对训练数据的需求并提升性能上限,在三维场景感知中有着广泛的应用价值。
论文链接:https://arxiv.org/abs/2203.13090
项目主页:https://github.com/hustvl/AziNorm

简介
从机器学习的角度考虑,数据中隐含的对称性能够作为算法的归纳偏置(inductive bias),对于提升算法精度有很大的帮助。点云是三维场景理解中最重要的表示形式,本工作讨论了点云数据特有的径向对称性(Radial Symmetry),并提出了针对点云数据的方位角归一化方法(Azimuth Normalization / AziNorm)。Azimuth Normalization采用了一种分而治之(Divide-and-conquer)的策略,灵活地分解全场景点云并在子点云上进行归一化。归一化后的子点云具有更简单的模式(pattern),更容易被下游的感知算法识别。Azimuth Normalization具有很强的拓展性,能够应用在多种传感器产生的点云数据上(如LiDAR、RADAR、RGB-D camera),能够与各类感知算法(如检测、分割)结合并且不需要改变具体算法的实现细节和超参数。Azimuth Normalization能够显著提升感知算法的数据效率(Data Efficiency),收敛速度和性能上限,如图1所示,AziNorm与SECOND [1] 检测算法结合提升明显,仅用10%的数据量或迭代次数就优于充分训练的SECOND。
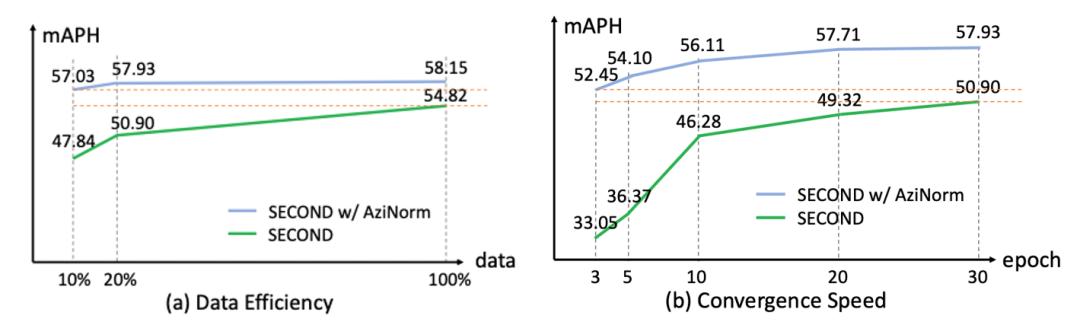
图1 数据效率、收敛速度和性能上限
径向对称性
径向对称性与产生点云数据的传感器(LiDAR / RADAR /RGB-D camera)的工作原理高度相关。以LiDAR为例,如图2,LiDAR始终沿着径向(法向)方向向各个方位角发射电磁波,电磁波触碰到障碍物表面后反射,沿着径向方向反射的回波最终被LiDAR接收,形成点云。因此,产生的点云在径向方向上具有明显的对称性(如图2中,地面的点云对称性明显)。

图2 径向对称性(Radial Symmetry)
算法流程
Azimuth Normalization采用了分治的策略,具体流程如下(流程图见图3):
Patch Splitting:把整个感知范围拆分为相互重叠的块(patch), 把全场景的点云规则地分解为子点云;
Patch Filtering:滤除不包含点云的patch、只含地面点的patch(点云具有稀疏性、不均匀性),避免不必要的计算开销;
Normalization:对子点云进行平移变换、旋转变换(对每个点的3D坐标进行),统一各个patch的径向方向;
Patch-wise Perception:在patch level调用现成的感知算法(point-based、voxel-based、hybrid),不需要改变实现细节和超参数;
Inverse Normalization:把感知结果逆变换回原本的LiDAR坐标系;
Patch Merging:融合各个patch结果,对于不同的感知任务可以采用不同的融合策略,例如,对于检测采用非极大值抑制(NMS),对于分割采用逐点平均。

图3 算法流程
实验结果
1. 点云检测和点云分割
表1和表2是Azimuth Normalization在点云检测和分割两个感知任务上的实验结果。值得注意的是,对于检测难度大的类别(点稀疏、训练样本数量少),如pedestrian和cyclist,Azimuth Normalization能够带来更明显的增益。Azimuth Normalization极大地简化点云数据中的模式(pattern),消除方位角带来的差异,在归一化后,难类别检测难度显著降低。
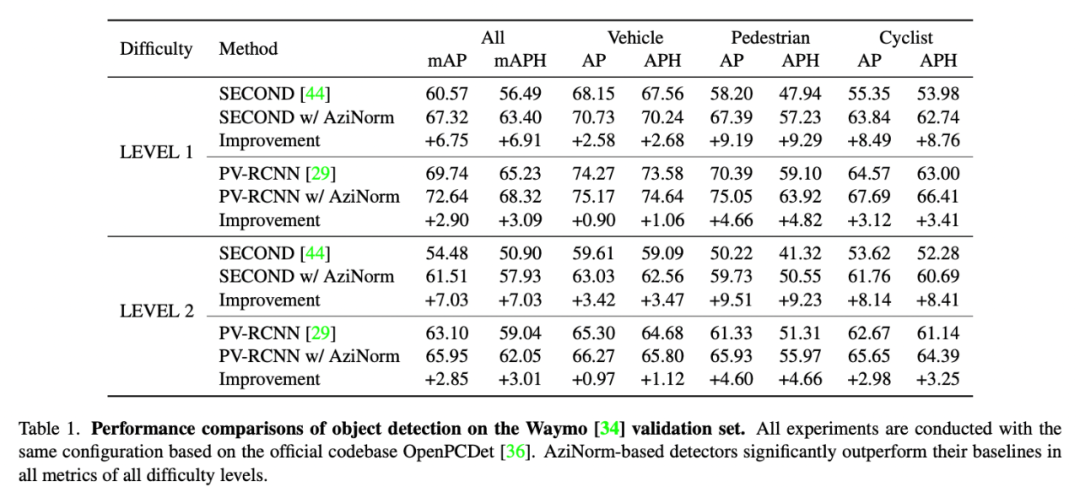
表1 点云检测算法SECOND [1] 和PV-RCNN [2] 在Waymo val set上的实验结果
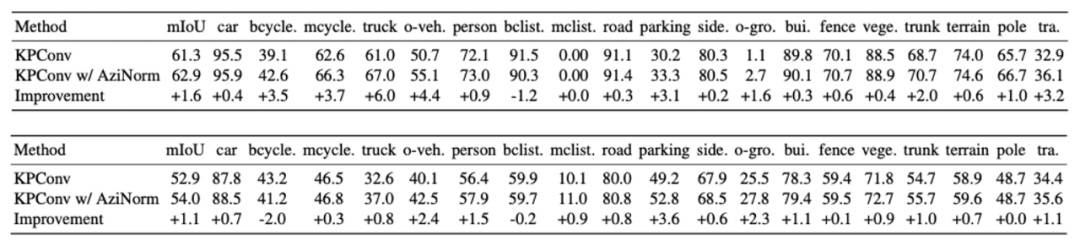
表2 点云分割算法KPConv [3] 在SemanticKitti val set和test set上的实验结果
2. 归一化粒度(Normalization Granularity)
图4展示了另一种分治策略,被称之为扇形区域归一化(Sectorial Normalization)。点云被均匀划分为扇形区域,并通过旋转统一径向方向。表3对比了Sectorial Normalization和Azimuth Normalization。4- 和8- Sectorial Normalization 把方位角的变化范围分别缩小到了90º和45º,而Azimuth Normalization的归一化粒度更小,因此性能提升更明显。

图4 扇形区域归一化(Sectorial Normalization)
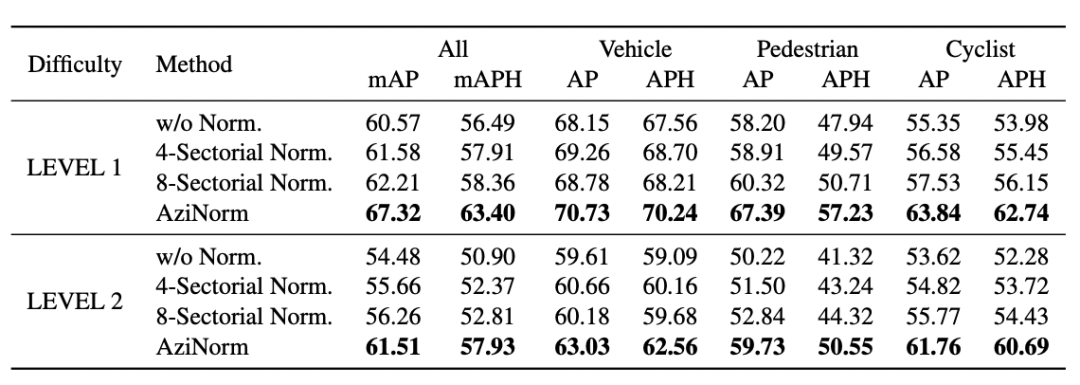
表3 归一化粒度 (Normalization Granularity)
3. 消融实验
表4是相关的消融实验,验证了Azimuth Normalization的性能提升主要来自于旋转变换,即对径向方向的归一化,以及Azimuth Normalization对patch的形状layout、尺寸radius、间距stride的选择不敏感。
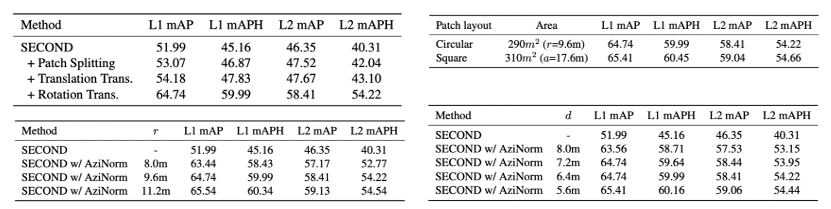
表4 消融实验
总结
Azimuth Normalization利用径向对称性对点云数据进行归一化,带来在数据效率、收敛速度、性能上限三个方面的提升,能够减少感知算法对于数据量的需求,降低标注成本,并且在对感知精度要求高的离线应用场景中有较大的应用价值,如自动标注(Auto Labeling)和生成高精地图(HD Maps)。
参考文献
[1] Yan Yan, Yuxing Mao, and Bo Li. Second: Sparsely embedded convolutional detection. Sensors, 2018.
[2] Shaoshuai Shi, Chaoxu Guo, Li Jiang, Zhe Wang, Jianping Shi, Xiaogang Wang, and Hongsheng Li. PV-RCNN: point- voxel feature set abstraction for 3d object detection. In CVPR, 2020.
[3] Hugues Thomas, Charles R. Qi, Jean-Emmanuel Deschaud, Beatriz Marcotegui, Franc ̧ois Goulette, and Leonidas J. Guibas. Kpconv: Flexible and deformable convolution for point clouds. In ICCV, 2019.
备注:作者也是我们「3D视觉从入门到精通」特邀嘉宾:一个超干货的3D视觉学习社区
本文仅做学术分享,如有侵权,请联系删文。
3D视觉工坊精品课程官网:3dcver.com
1.面向自动驾驶领域的多传感器数据融合技术
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
4.国内首个面向工业级实战的点云处理课程
5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
9.从零搭建一套结构光3D重建系统[理论+源码+实践]
10.单目深度估计方法:算法梳理与代码实现
11.自动驾驶中的深度学习模型部署实战
12.相机模型与标定(单目+双目+鱼眼)
13.重磅!四旋翼飞行器:算法与实战
14.ROS2从入门到精通:理论与实战
15.国内首个3D缺陷检测教程:理论、源码与实战
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款

圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~
最后
以上就是过时钢笔最近收集整理的关于CVPR 2022 | 基于径向对称性和分治策略的点云方位角归一化的全部内容,更多相关CVPR内容请搜索靠谱客的其他文章。


![[Unity&]缺少引用空间Utility的解决办法](https://www.shuijiaxian.com/files_image/reation/bcimg19.png)





发表评论 取消回复