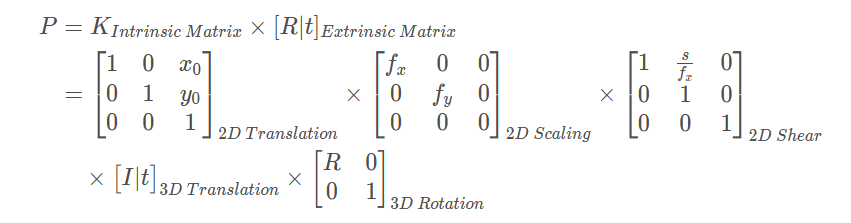
相机矩阵分解
- 全相机矩阵被分解为内参和外参矩阵
- 外参矩阵指示3D旋转和平移
- 内参矩阵指示2D变换
整个分解方法如下
 https://blog.csdn.net/zb1165048017/article/details/71104241
https://blog.csdn.net/zb1165048017/article/details/71104241
http://ksimek.github.io/perspective_camera_toy.html
像素坐标系直接到世界坐标系
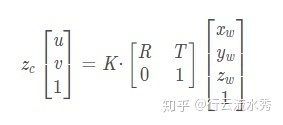
即相机深度 z c z_c zc乘以像素坐标 =相机内参K相机外参RT世界坐标
最后
以上就是醉熏信封最近收集整理的关于【相机标定系列】相机成像的理想模型原理,相机矩阵分解相机矩阵分解的全部内容,更多相关【相机标定系列】相机成像内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复