ros基础入门
前言
------说起ROS,可能大家现在或多或少都有所了解。现如今世界机器人发展之迅猛犹如几十年前计算机行业一样,机器人也逐渐进入到千家万户,大到工业机器人,小到家用的服务型机器人,各式各样,为各种人们生活所需的机器人以计算机技术的发展为基础的机器人也是如雨后春笋。机器人可主要分为硬件层和软件层两个大的主要方向。每一种类型的机器人都需要以硬件的实际情况编写符合用户需要的功能,渐渐的人们发现,这样的机器人代码的复用率很低,大大阻碍了机器人的发展。因此ROS便是为机器人在研发的过程中的代码复用提供支持.ROS是Robot Operating Syetem(机器人操作系统)的简称.ROS开始于2007年,在斯坦福大学人工智能实验室斯坦福AI机器人项目的支持下开发了ROS。
一、安装Linux ubuntu
学习ROS首先要安装Linux,为了不抛弃原Windows操作系统,有两个选择:一个是在VMvare等虚拟机上运行,另一个是安装Windows和Linux的双系统。我的建议是电脑有足够的空间的话,最好安装双系统,这样在Linux上使用ROS时运行速度更快。虚拟机跑ROS我没尝试过,但是网上也看到有人用虚拟机学习ROS,如果电脑不好装双系统或者内存不够的话可以尝试使用虚拟机。
这里的话就讲解一下如何装双系统,因为以后长期需要使用Linux系统,所以双系统比较稳定,并且出现的问题也没有虚拟机那么多。安装linux系统需要一个系统启动盘,所以需要一个U盘,最好是3.0 3.1或者是3.2版本的2.0版本的速度比较慢。
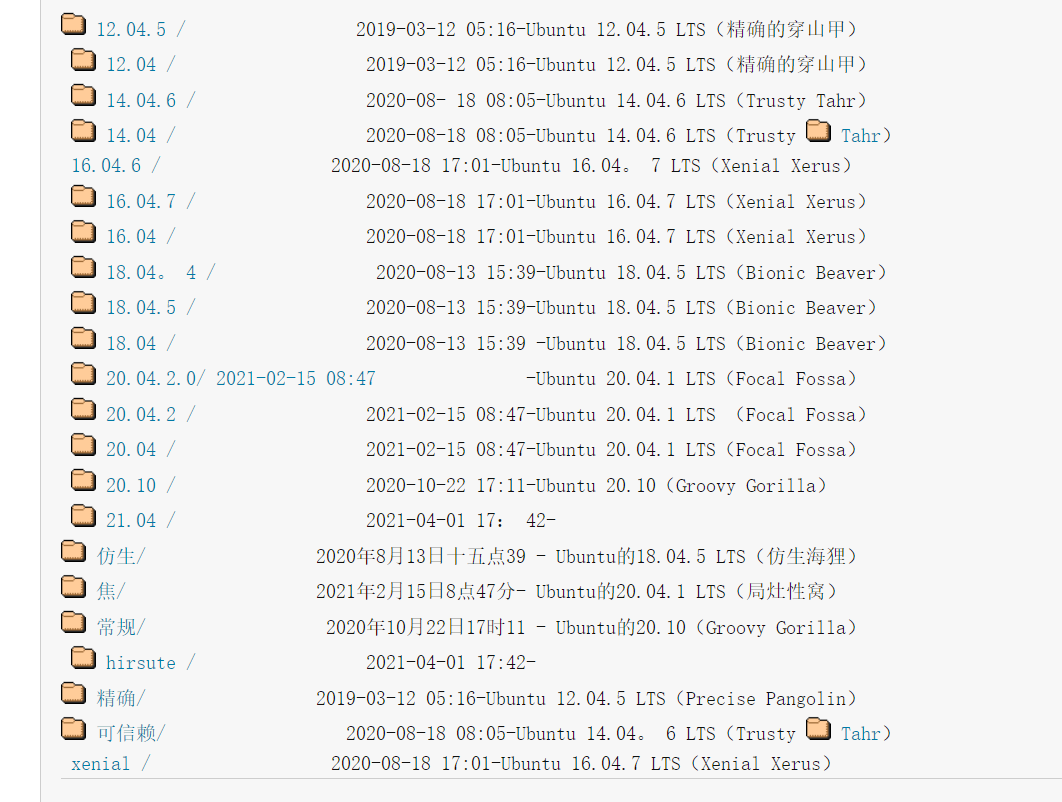
首先下载Ubuntu,在https://ubuntu.com/网页下载,电脑下载的Ubuntu系统需要和ros系统版本一致,现在比较成熟并且开发较完全的是18.04版本
在Ubuntu desktop里面,然后右下方有一个see our alternative downloads.,然后拖到最下方,有一个Past releases,点击打开里面每一个版本全都有。
二、安装Melodic
装好Ubuntu系统之后,在Ubuntu系统中打开网页https://www.ros.org/,进入Wiki,进入install,进入ROS Melodic Morenia,

点击ubuntu。出现界面如下:
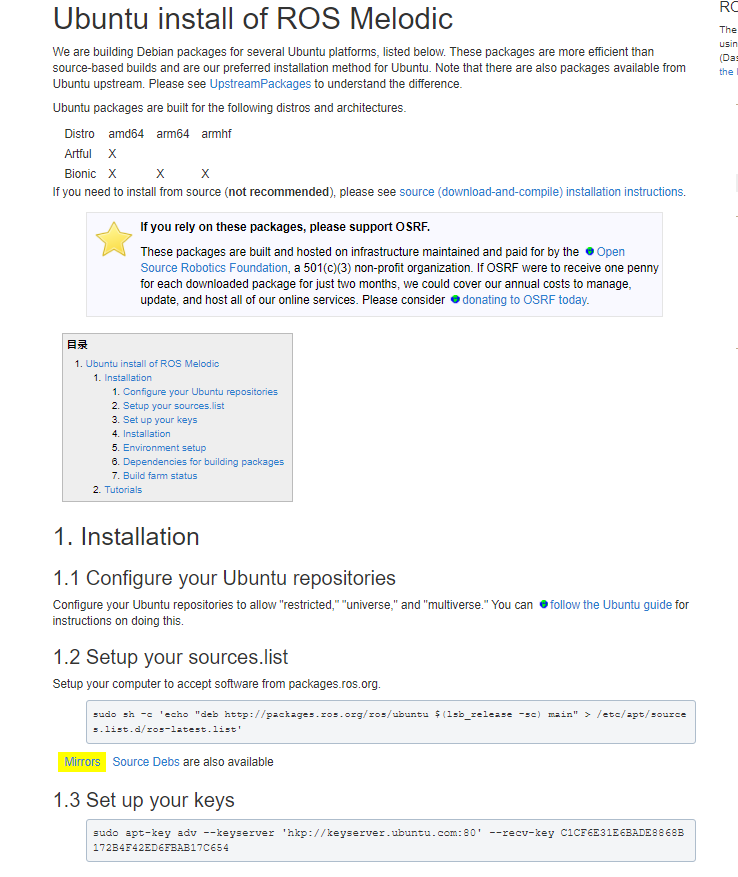
然后按照官方指导进行下载。
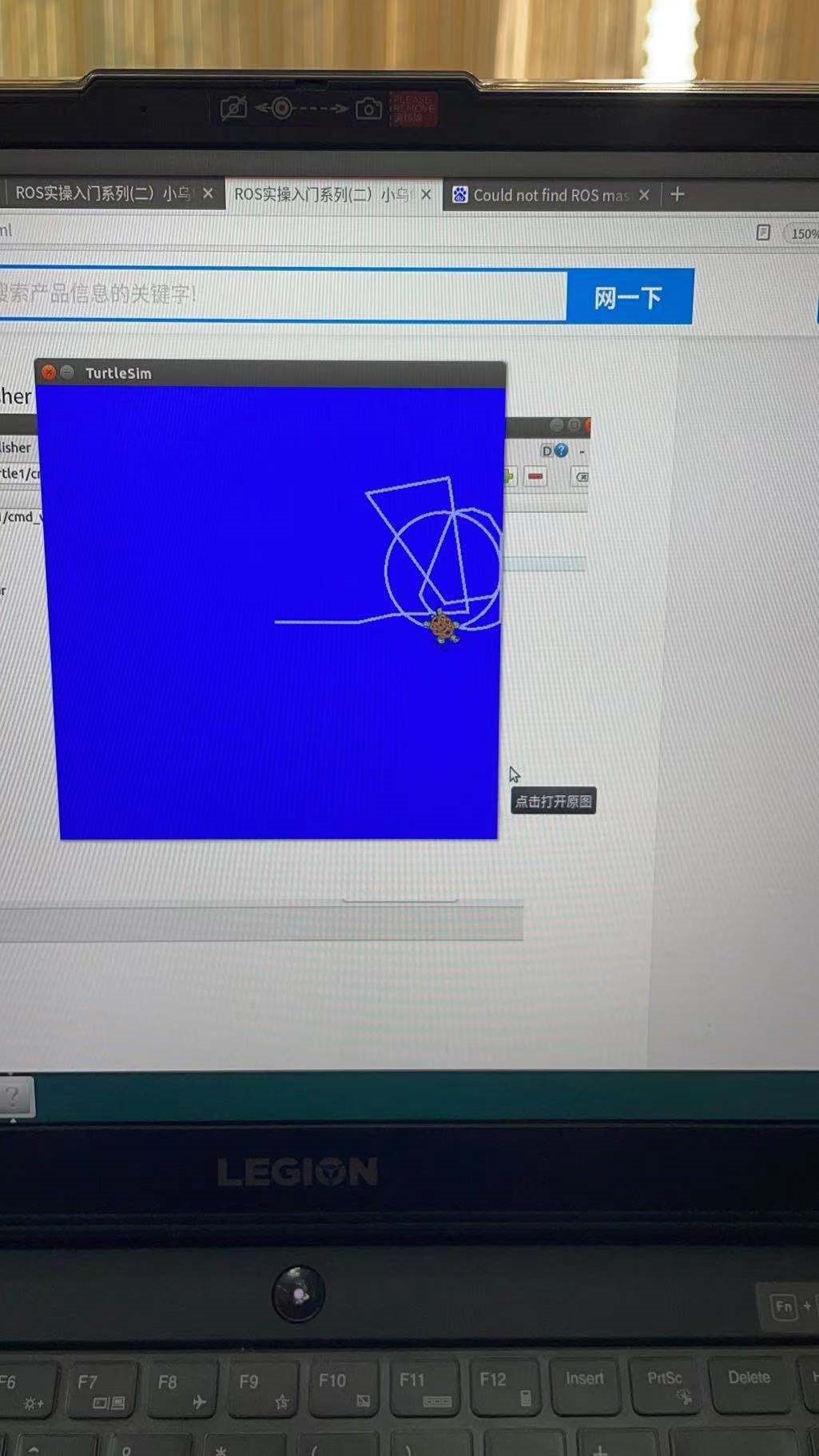
安装完成可以运行小乌龟程序。
有不懂的请具体参考哔哩哔哩 作者:五味666 《中科院软件所-机器人操作系统入门》。这个视频具体介绍了系统的构成以及一些基本的命令,足够用了。课程比较短比较适合初学者。
三、如何学习ros
ros代码包里面的代码由C++编写,推荐《C++ Primer》,以及《Effective C++》。
首先我们需要建立一个URDF模型,参考《从零开始写URDF模型》来自Stay hungry. Stay foolish. 来自https://blog.csdn.net/wuzhishiwo/article/details/109148267
然后还要会使用rviz,参考《ROS中rviz使用教程》来自雪花飞龙 来自https://blog.csdn.net/weixin_43956732/article/details/106481287
最后还需要学会是用模拟器gazebo,参考《ros gazebo基础教程》 来自DJ丶丶 来自https://blog.csdn.net/qq91752728/article/details/79577399
四、如何跑模拟
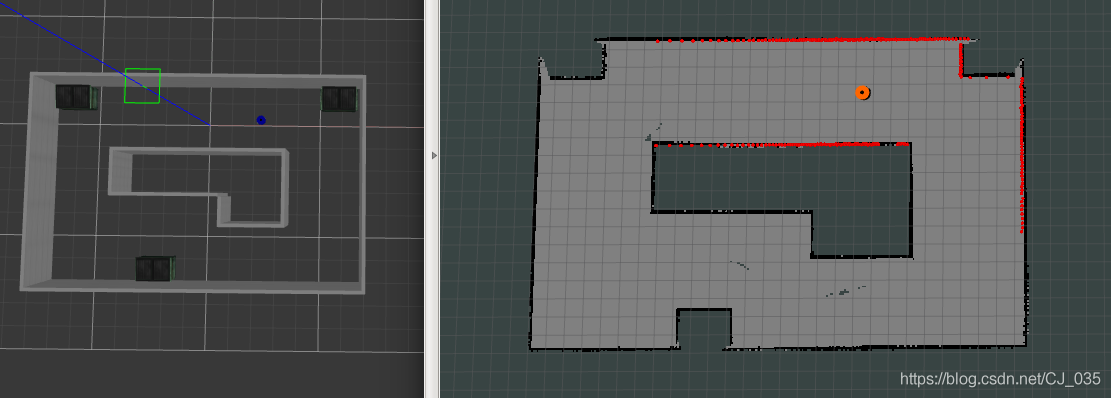
然后我们要进行跑模拟,
首先创建一个仿真环境
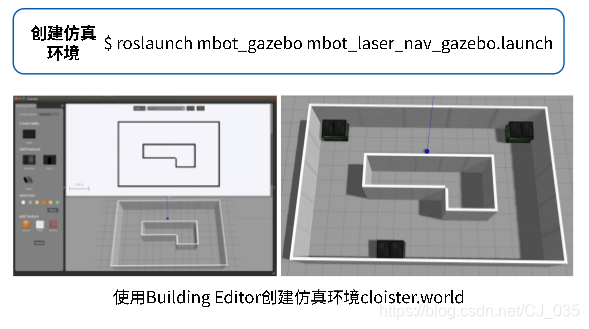
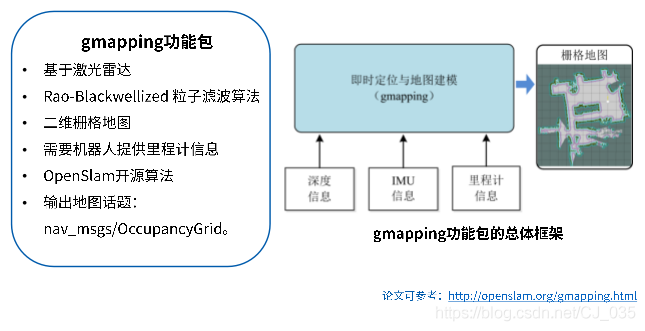
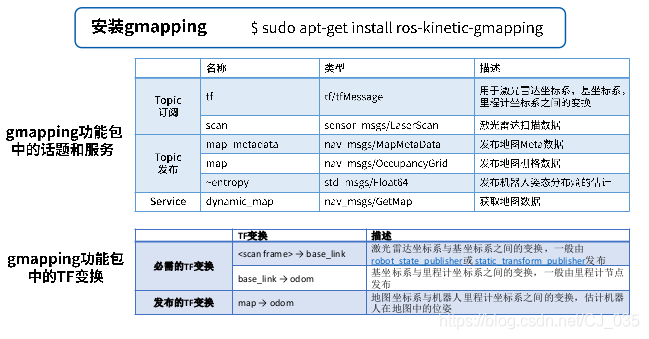
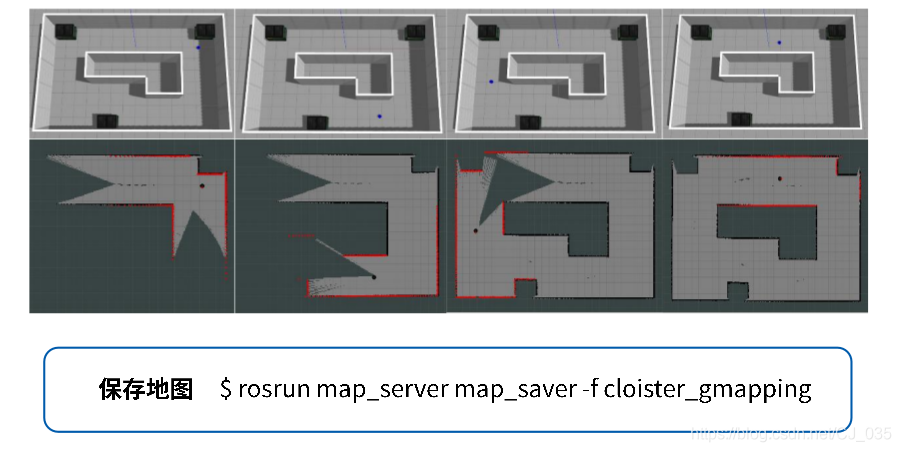
我们这里用gmapping-slam功能包来仿真

//最好把包全部重新导进去,这样就更能顺利进行每一步操作
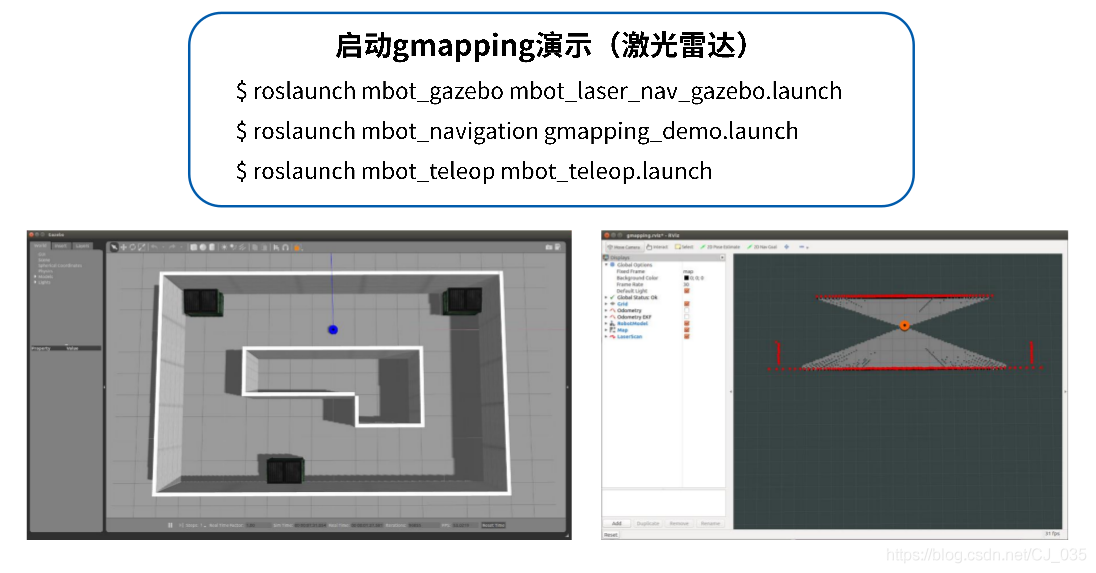
roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch
roslaunch mbot_navigation gmapping_demo.launch
roslaunch mbot_teleop mbot_teleop.launch
之后如果遇到之前的小车加载不出来的话,在新的终端中运行killall gzserver 就行了,再运行killall gzclient就会出错,但是上面描述的问题已经解决。
具体请参考https://blog.csdn.net/CJ_035/article/details/97475940
然后除了gmapping-slam还有hector-slam, cartographer-slam这几种功能包。
都可以在GitHub上寻找功能包进行模拟,下载代码包可以在github上下载。
同时推荐csdn这个app,也有网页版的,这个是主要的论坛,可以在上面找到很多的教程,还有哔哩哔哩也很实用,推荐一个古月居的博客,做机器人行业的大神。
最后感谢提供资料的各位博主,有没有列举出来的还请多多包涵。
最后
以上就是冷静舞蹈最近收集整理的关于ros基础入门前言一、安装Linux ubuntu二、安装Melodic三、如何学习ros四、如何跑模拟的全部内容,更多相关ros基础入门前言一、安装Linux内容请搜索靠谱客的其他文章。


![[linux]signal函数不起作用](https://www.shuijiaxian.com/files_image/reation/bcimg9.png)





发表评论 取消回复