目录
1.创建工作空间
2.创建功能包
3.在include中创建广播publisher_class.h文件
4.在src中创建publisher_class.cpp
5.创建publisher_class_main.cpp
6.修改cmake文件
7.编译
8.运行节点roscore,source devel/setup.bash
1.创建工作空间
mkdir -p ~/test_ws/src
cd ~/test_ws/src
catkin_init_workspace
cd ~/test_ws
catkin_make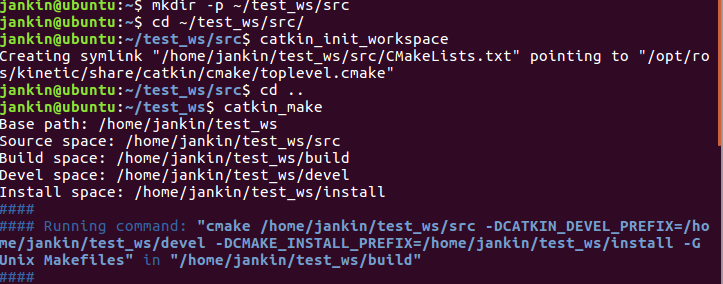
2.创建功能包
cd ~/tets_ws/src
catkin_create_pkg example_class roscpp std_msgs std_srvs3.在include中创建广播publisher_class.h文件
// example_ros_class.h header file //
// wsn; Feb, 2015
// include this file in "example_ros_class.cpp"
// here's a good trick--should always do this with header files:
// create a unique mnemonic for this header file, so it will get included if needed,
// but will not get included multiple times
#ifndef EXAMPLE_ROS_CLASS_H_
#define EXAMPLE_ROS_CLASS_H_
//some generically useful stuff to include...
#include <math.h>
#include <stdlib.h>
#include <string>
#include <vector>
#include <ros/ros.h> //ALWAYS need to include this
//message types used in this example code; include more message types, as needed
#include <std_msgs/Bool.h>
#include <std_msgs/Float32.h>
#include <std_srvs/Trigger.h> // uses the "Trigger.srv" message defined in ROS
// define a class, including a constructor, member variables and member functions
class ExampleRosClass
{
public:
ExampleRosClass(ros::NodeHandle* nodehandle); //"main" will need to instantiate a ROS nodehandle, then pass it to the constructor
// may choose to define public methods or public variables, if desired
private:
// put private member data here; "private" data will only be available to member functions of this class;
ros::NodeHandle nh_; // we will need this, to pass between "main" and constructor
// some objects to support subscriber, service, and publisher
ros::Subscriber minimal_subscriber_; //these will be set up within the class constructor, hiding these ugly details
ros::ServiceServer minimal_service_;
ros::Publisher minimal_publisher_;
double val_from_subscriber_; //example member variable: better than using globals; convenient way to pass data from a subscriber to other member functions
double val_to_remember_; // member variables will retain their values even as callbacks come and go
// member methods as well:
void initializeSubscribers(); // we will define some helper methods to encapsulate the gory details of initializing subscribers, publishers and services
void initializePublishers();
void initializeServices();
void subscriberCallback(const std_msgs::Float32& message_holder); //prototype for callback of example subscriber
//prototype for callback for example service
bool serviceCallback(std_srvs::TriggerRequest& request, std_srvs::TriggerResponse& response);
}; // note: a class definition requires a semicolon at the end of the definition
#endif // this closes the header-include trick...ALWAYS need one of these to match #ifndef
4.在src中创建publisher_class.cpp
#include <example_class/publisher_class.h>
//定义构造函数
ExampleRosClass::ExampleRosClass(ros::NodeHandle* nodehandle):nh_(*nodehandle)
{
ROS_INFO("in class constructor of ExampleRosClass");
initializeSubscribers();
initializePublishers();
initializeServices();
val_to_remember_=0.0;
}
//初始化订阅函数,收到消息后调用回调函数
void ExampleRosClass::initializeSubscribers()
{
ROS_INFO("Initializing Subscribers");
minimal_subscriber_=nh_.subscribe("example_class_input_topic",1,&ExampleRosClass::subscriberCallback,this);//回调函数
}
//初始化服务函数,服务回调函数
void ExampleRosClass::initializeServices()
{
ROS_INFO("Initializing Services");
minimal_service_=nh_.advertiseService("example_minimal_service",&ExampleRosClass::serviceCallback,this);
}
//初始化广播函数
void ExampleRosClass::initializePublishers()
{
ROS_INFO("Initializing Publishers");
minimal_publisher_=nh_.advertise<std_msgs::Float32>("example_class_output_topic",1,true);
}
//回调函数
void ExampleRosClass::subscriberCallback(const std_msgs::Float32& message_holder)
{
val_from_subscriber_=message_holder.data;
ROS_INFO("myCallback activated:received value %f",val_from_subscriber_);
std_msgs::Float32 output_msg;
val_to_remember_+=val_from_subscriber_;
output_msg.data=val_to_remember_;
minimal_publisher_.publish(output_msg);
}
//服务回调函数
bool ExampleRosClass::serviceCallback(std_srvs::TriggerRequest& request,std_srvs::TriggerResponse& response)
{
ROS_INFO("service callback activated");
response.success=true;
response.message="here is a response string";
return true;
}5.创建publisher_class_main.cpp
#include <example_class/publisher_class.h>
int main(int argc,char** argv)
{
ros::init(argc,argv,"example_lib_test_main");
ros::NodeHandle nh;
ROS_INFO("main:instantiating an object of type ExampleRosClass");
ExampleRosClass exampleRosClass(&nh);
ROS_INFO("main:going into spin;let the callbacks do all the work");
ros::spin();
return 0;
}6.修改cmake文件
cmake_minimum_required(VERSION 3.0.2)
project(example_class)
find_package(catkin REQUIRED COMPONENTS
std_srvs
roscpp
std_msgs
)
catkin_package()
include_directories(
include
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
add_library(
publisherclass##起一个库的名字
include/example_class/publisher_class.h##.h文件路径
src/publisher_class.cpp ##.cpp文件路径
)
add_executable(publisher_class src/publisher_class_main.cpp)
#手动添加 第一个是可执行文件的文件名,后面是源,可以多个,用空格隔开
target_link_libraries(publisher_class publisherclass ${catkin_LIBRARIES}) #此可执行文件所需的链接库,第一个可执行文件名,后面为链接库,可多个,用空格隔开
7.编译
catkin_make8.运行节点roscore,source devel/setup.bash
rosrun example_class publisher_class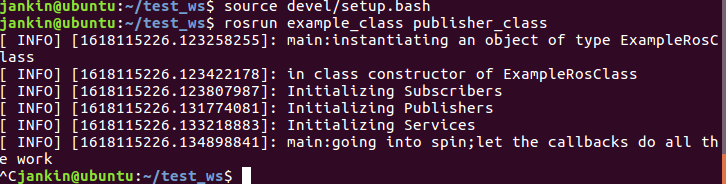
最后
以上就是悦耳金毛最近收集整理的关于ros中使用c++类的全部内容,更多相关ros中使用c++类内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复