笔者的工作涉及到ROS的使用,一直以来接触到的ROS知识都是零零碎碎的,最近发现胡春旭大神写的《ROS机器人开发实践》这本书很棒,现在边学习边写笔记边用于工作中,全书有点厚,也是得抓紧时间学习,他也是ROS社区中很出名得古月大神哦,有时间的小伙伴赶紧学起来吧!希望小伙伴们在阅读过程中发现问题,欢迎你们给我纠错,毕竟我也是小白,非常感谢!
- turtlesim功能包
# 1.下表是turtlesim功能包的话题和服务,可能有所更新
# 2.安装turtlesim功能包
sudo apt-get install ros-kinetic-turtlesim

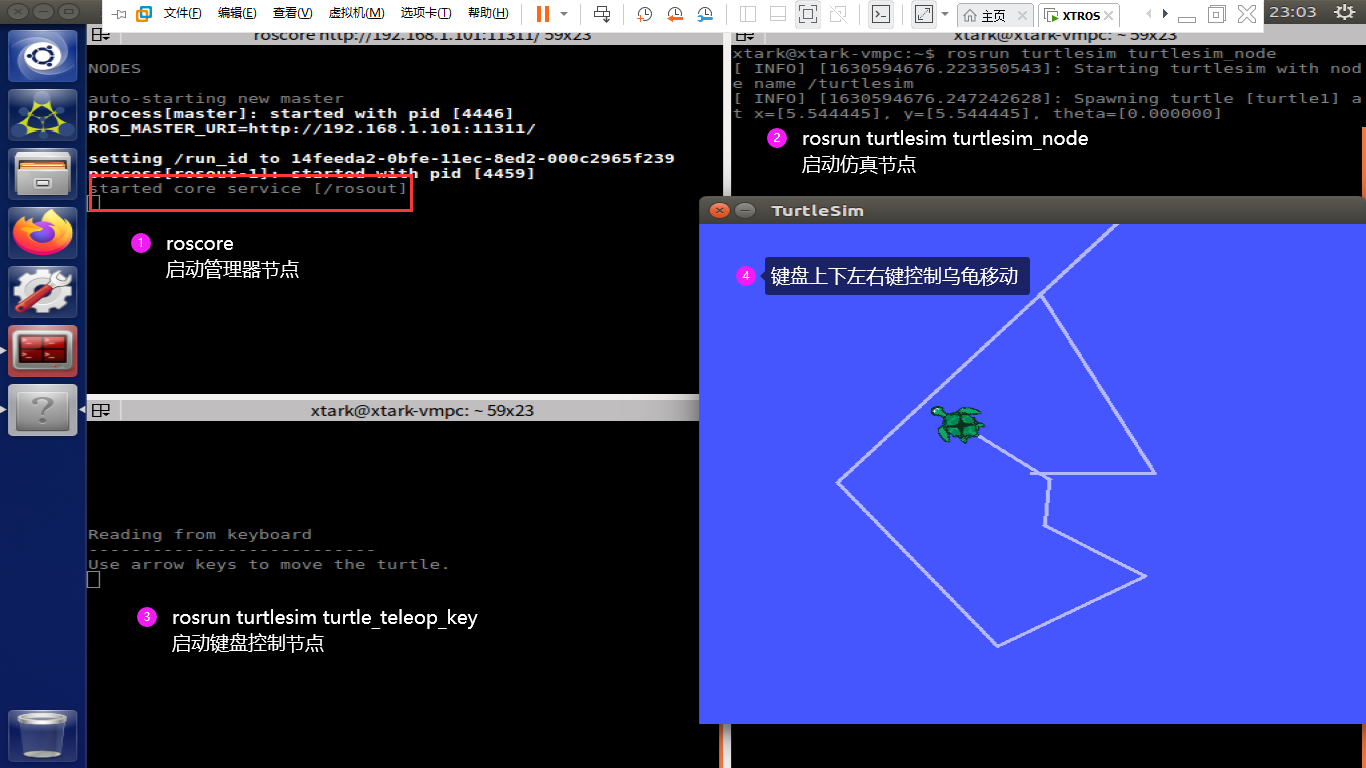
- 控制小乌龟移动
# 1.启动管理器节点
roscore
# 2.启动仿真器节点
rosrun turtlesim turtlesim_node
# 3.启动键盘控制节点
rosrun turtlesim turtle_teleop_key
最后
以上就是平淡小甜瓜最近收集整理的关于ROS学习笔记4--运行第一个例程(小乌龟仿真)的全部内容,更多相关ROS学习笔记4--运行第一个例程(小乌龟仿真)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复