文章目录
- 一、线性空间与线性变换
- 1.1 可交换性 和 结合律
- 1.2 线性空间
- 1.3 傅里叶变换
- 1.3.1 连续傅里叶变换
- 1.3.2 离散傅里叶变换
- 1.4 线性相关和线性无关
- 1.4.1 线性相关
- 1.5 秩
- 1.6 线性变换
- 二、矩阵、等价类和行列式
- 2.1 可逆矩阵表示坐标变换
- 2.2 相似矩阵
- 2.3 线性代数解微分方程
- 2.4 转秩 和 求逆
- 2.4.1 转秩
- 2.4.2 求逆
- 2.5 等价类
- 2.6 行列式 d e t ( A ) det(A) det(A)
- 三、特征值与特征向量
- 3.1 特征值与特征向量
- 3.2 特征值的计算
- 3.3 线性代数核心定理
- 3.4 欧式空间与闵氏空间
一、线性空间与线性变换
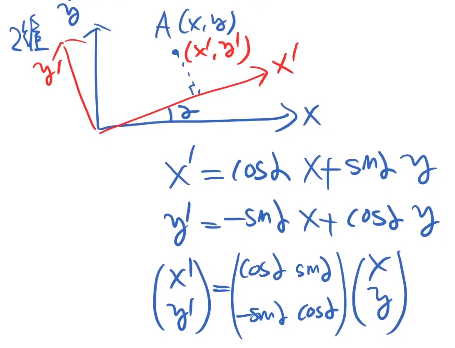
- 旋转变化:
1.1 可交换性 和 结合律
- A B ≠ B A AB neq BA AB=BA
- 对角矩阵可以交换
- 结合律: A i × j ( B j × k C k × s ) = ( A i × j B j × k ) C k × s A_{i×j}(B_{j×k}C_{k×s}) = (A_{i×j}B_{j×k})C_{k×s} Ai×j(Bj×kCk×s)=(Ai×jBj×k)Ck×s
1.2 线性空间
存
在
集
合
V
=
{
v
i
∣
i
是
指
数
集
}
,
配
数
域
k
存在集合 V = { v_i | i 是指数集 },配数域 k
存在集合V={vi∣i是指数集},配数域k
任
意
,
α
,
β
,
θ
∈
V
,
满
足
以
下
8
条
定
律
:
任意, alpha ,beta, theta in V,满足以下8条定律:
任意,α,β,θ∈V,满足以下8条定律:
- α ⃗ + β ⃗ = β ⃗ + α ⃗ vec{alpha} + vec{beta} = vec{beta} + vec{alpha} α+β=β+α
- ( α ⃗ + β ⃗ ) + θ ⃗ = α ⃗ + ( β ⃗ + θ ⃗ ) (vec{alpha} + vec{beta}) + vec{theta} = vec{alpha} + (vec{beta} + vec{theta}) (α+β)+θ=α+(β+θ)
- 存 在 ( 零 元 ) 0 ⃗ ∈ V , α ⃗ + 0 ⃗ = α ⃗ 存在(零元) vec{0} in V, quad vec{alpha} +vec{0} = vec{alpha} 存在(零元)0∈V,α+0=α
- 逆元存在性: 任 意 α ⃗ , 存 在 β ⃗ , 使 得 α ⃗ + β ⃗ = 0 ⃗ 任意vec{alpha},存在vec{beta},使得 vec{alpha} + vec{beta} = vec{0} 任意α,存在β,使得α+β=0
- 数乘单位元: 1 ∈ k 1 ∗ α ⃗ = α ⃗ 1 in k quad 1* vec{alpha}=vec{alpha} 1∈k1∗α=α
- 数乘结合律: m , n ∈ k m ( n α ⃗ ) = n ( m α ⃗ ) m,n in k quad m(nvec{alpha}) = n(m vec{alpha}) m,n∈km(nα)=n(mα)
- 数乘分配率: m ∈ k m ( α ⃗ + β ⃗ ) = m α ⃗ + m β ⃗ m in k quad m(vec{alpha} + vec{beta}) = mvec{alpha} + mvec{beta} m∈km(α+β)=mα+mβ
- m , n ∈ k ( m + n ) α ⃗ = m α ⃗ + n α ⃗ m,n in k quad (m+n)vec{alpha} = mvec{alpha} + nvec{alpha} m,n∈k(m+n)α=mα+nα
1.3 傅里叶变换
1.3.1 连续傅里叶变换
-
傅里叶变换
g ( k ) = ∫ − ∞ + ∞ f ( x ) e − i k x d x g(k) = int_{-infty}^{+infty}f(x)e^{-ikx} dx g(k)=∫−∞+∞f(x)e−ikxdx- 求
f
′
(
x
)
f^{'}(x)
f′(x)的傅里叶变换:
F . T ( f ′ ( x ) ) = ∫ − ∞ + ∞ f ′ ( x ) e − i k x d x = ∫ − ∞ + ∞ e − i k x d f ( x ) = f ( x ) e − i k x ∣ − ∞ + ∞ − ( − i k ) ∫ − ∞ + ∞ f ( x ) e − i k x d x = 0 − ( − i k ) ∫ − ∞ + ∞ f ( x ) e − i k x d x = ( i k ) F . T ( f ( x ) ) F.T(f^{'}(x)) = int_{-infty}^{+infty}f^{'}(x)e^{-ikx} dx = int_{-infty}^{+infty}e^{-ikx} df(x) \ =f(x)e^{-ikx} |_{- infty}^{+infty}- (-ik)int_{-infty}^{+infty}f(x)e^{-ikx} dx\ = 0 - (-ik)int_{-infty}^{+infty}f(x)e^{-ikx} dx \ = (ik) F.T (f(x)) F.T(f′(x))=∫−∞+∞f′(x)e−ikxdx=∫−∞+∞e−ikxdf(x)=f(x)e−ikx∣−∞+∞−(−ik)∫−∞+∞f(x)e−ikxdx=0−(−ik)∫−∞+∞f(x)e−ikxdx=(ik) F.T(f(x)) - 求
f
′
′
(
x
)
f^{''}(x)
f′′(x)的傅里叶变换:
计算过程同上;
F . T ( f ′ ′ ( x ) ) = ( i k ) 2 F . T ( f ( x ) ) F.T(f^{''}(x)) = (ik)^2 F.T (f(x)) F.T(f′′(x))=(ik)2 F.T(f(x))
- 求
f
′
(
x
)
f^{'}(x)
f′(x)的傅里叶变换:
-
傅里叶逆变换
f ( x ) = 1 2 π ∫ − ∞ + ∞ g ( k ) e i k x d k f(x) = frac{1}{2pi} int_{-infty}^{+infty}g(k) e^{ikx} dk f(x)=2π1∫−∞+∞g(k)eikxdk
1.3.2 离散傅里叶变换
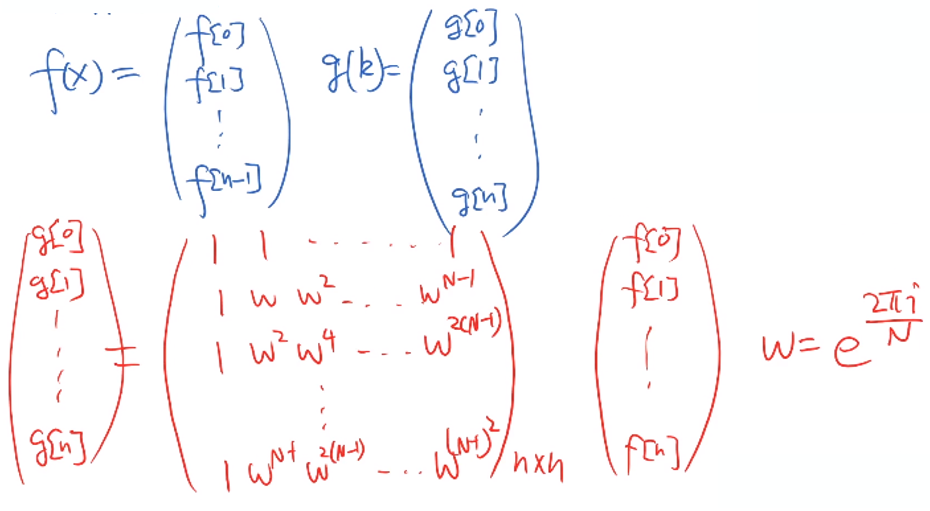
- 离散傅里叶变换的时间复杂度: O ( n 2 ) O(n^2) O(n2)
- 快速傅里叶变换的时间复杂度: O ( n ln n ) O(nln n) O(nlnn)
1.4 线性相关和线性无关
1.4.1 线性相关
- 有冗余的内容信息
- 线性相关定义:
n 个向量 v 1 ⃗ , v 2 ⃗ , . . . , v n ⃗ ∈ V vec{v_1},vec{v_2},...,vec{v_n} in V v1,v2,...,vn∈V
存在 a 1 , a 2 , . . . , a n {a_1},{a_2},...,{a_n} a1,a2,...,an不全为 0
若存在, a 1 v 1 ⃗ + a 2 v 2 ⃗ + . . . + a n v n ⃗ = 0 ⃗ a_1vec{v_1} + a_2vec{v_2} + ... + a_n vec{v_n} = vec{0} a1v1+a2v2+...+anvn=0
则, { v 1 ⃗ , v 2 ⃗ , . . . , v n ⃗ } 线 性 相 关 。 { vec{v_1},vec{v_2},...,vec{v_n} } 线性相关。 {v1,v2,...,vn}线性相关。
-
线性无关的定义则与线性相关相反。
不存在 a 1 , a 2 , . . . , a n {a_1},{a_2},...,{a_n} a1,a2,...,an不全为 0;
使 a 1 v 1 ⃗ + a 2 v 2 ⃗ + . . . + a n v n ⃗ = 0 ⃗ a_1vec{v_1} + a_2vec{v_2} + ... + a_n vec{v_n} = vec{0} a1v1+a2v2+...+anvn=0
则, { v 1 ⃗ , v 2 ⃗ , . . . , v n ⃗ } 线 性 无 关 。 { vec{v_1},vec{v_2},...,vec{v_n} } 线性无关。 {v1,v2,...,vn}线性无关。 -
最大线性无关组
1.5 秩
-
矩阵按行/ 列切成的向量组成的"极大线性无关组的个数" 相同。
-
秩 = " 极 大 线 性 无 关 组 的 个 数 " 秩 = "极大线性无关组的个数" 秩="极大线性无关组的个数"
-
决定是否可逆
1.6 线性变换
-
初等变换
- k 列乘以 a 倍
- k 列的 a 倍 加到 s 列上
- k 列与 s 列对调
-
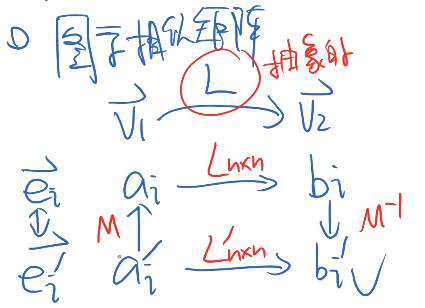
定义:
从一个线性空间变换到另一个线性空间。
L ( a α ⃗ + b β ⃗ ) = a L ( α ⃗ ) + b L ( β ⃗ ) L(a vec{alpha} + b vec{beta}) = a L(vec{alpha}) + b L(vec{beta}) L(aα+bβ)=aL(α)+bL(β) -
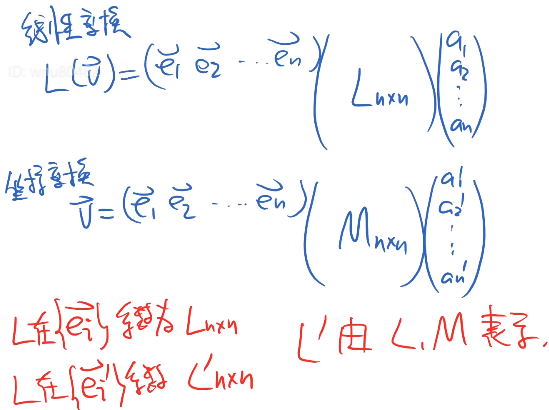
变换的方式
- 向量不变,基底变换
r ⃗ = a 1 e 1 ⃗ + a 2 e 2 ⃗ = a 1 ′ e 1 ⃗ ′ + a 2 ′ e 2 ⃗ ′ vec{r} = a_1 vec{e_1} + a_2 vec{e_2} = a_1^{'} vec{e_1}^{'} + a_2^{'} vec{e_2}^{'} r=a1e1+a2e2=a1′e1′+a2′e2′ - 向量变换,基底不变
r ⃗ = a 1 e 1 ⃗ + a 2 e 2 ⃗ vec{r} = a_1 vec{e_1} + a_2 vec{e_2} r=a1e1+a2e2
r ⃗ = a 1 ′ ′ e 1 ⃗ + a 2 ′ ′ e 2 ⃗ vec{r} = a_1^{''} vec{e_1} + a_2^{''} vec{e_2} r=a1′′e1+a2′′e2
- 向量不变,基底变换
-
由于任何一个向量都可以用一组基向量进行表示,所以根据基向量的变化就可以得到任一向量的表示。
二、矩阵、等价类和行列式
2.1 可逆矩阵表示坐标变换
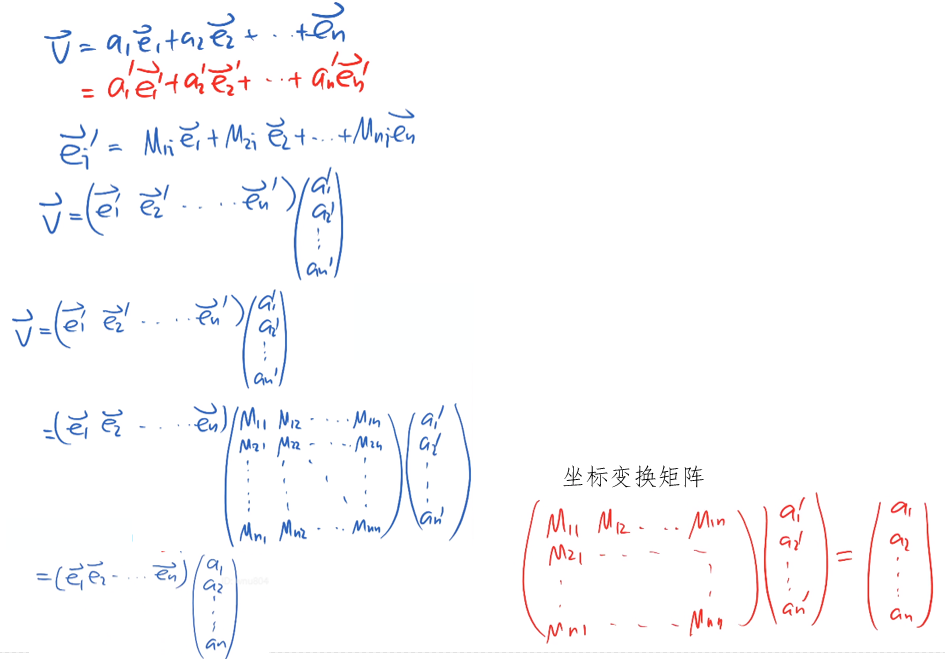
- 任意向量的坐标变换都可以由 M n × n M_{n×n} Mn×n表示
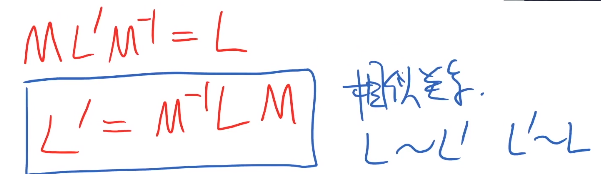
2.2 相似矩阵
-
定义:
相似矩阵是指具有相似关系的矩阵。假设 M , N 为 n 阶 矩 阵 。 如 果 有 n 阶 可 逆 矩 阵 P 存 在 , 满 足 以 下 条 件 M,N 为 n 阶矩阵。如果有n 阶可逆矩阵 P 存在,满足以下条件 M,N为n阶矩阵。如果有n阶可逆矩阵P存在,满足以下条件
A = P − 1 B P A=P^{-1} B P A=P−1BP
则 称 矩 阵 A 与 B 相 似 , 记 为 A ∼ B 。 则称 矩阵 A 与 B 相似,记为 Asim B。 则称矩阵A与B相似,记为A∼B。 -
实例介绍
-
相似矩阵表示相同的线性变换
2.3 线性代数解微分方程
全体 f ( x ) f(x) f(x) 构成线性空间 V ⃗ vec{V} V,存在大量的线性映射。
-
求导是线性的。
-
例如:求解下面的公式:
- 上式不好求解,可以尝试替换基底的方法。
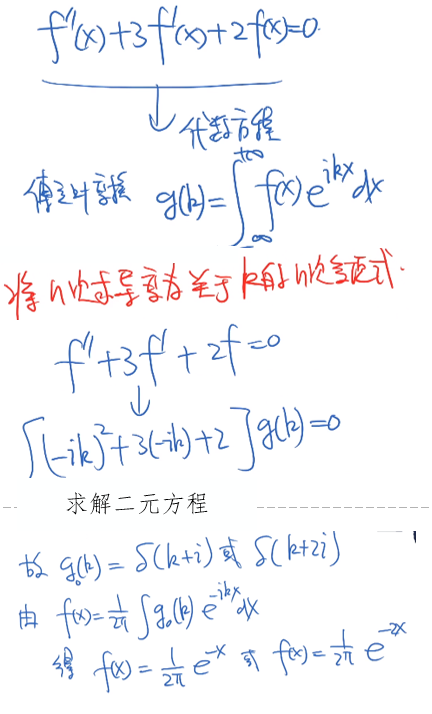
- 上式不好求解,可以尝试替换基底的方法。
2.4 转秩 和 求逆
2.4.1 转秩
- ( A B ) T = B T A T (AB)^T = B^T A^T (AB)T=BTAT
2.4.2 求逆
- M − 1 M = I = M M − 1 n M^{-1}M = I = MM^{-1} n M−1M=I=MM−1n
- ( A B ) − 1 = B − 1 A − 1 (AB)^{-1} = B^{-1} A^{-1} (AB)−1=B−1A−1
2.5 等价类
-
等价关系
A ∼ B ; B ∼ C , → A ∼ C A sim B; B sim C, rightarrow A sim C A∼B;B∼C,→A∼C
二元关系, 区分前后(有序对)- 1)反身性: A ∼ A A sim A A∼A
- 2)互反性: A ∼ B ; B ∼ A A sim B; B sim A A∼B;B∼A
- 3)传递性: A ∼ B ; B ∼ C , → A ∼ C A sim B; B sim C, rightarrow A sim C A∼B;B∼C,→A∼C
-
矩阵证明 A ∼ B ; B ∼ C , → A ∼ C A sim B; B sim C, rightarrow A sim C A∼B;B∼C,→A∼C:
- A ∼ B → A = M − 1 B M A sim B rightarrow A = M^{-1}BM A∼B→A=M−1BM
- B ∼ C → B = N − 1 C N Bsim C rightarrow B= N^{-1}CN B∼C→B=N−1CN
- A = M − 1 N − 1 C N M = ( N M ) − 1 C ( N M ) → A ∼ C A = M^{-1}N^{-1}CNM \ = (NM)^{-1}C(NM) rightarrow A sim C A=M−1N−1CNM=(NM)−1C(NM)→A∼C
-
等价类
若集合 O O O 存在等价关系,
则集合 O O O,可分割成不相关的子集 O 1 ∪ O 2 ∪ O 3 . . . O_1 cup O_2 cup O_3... O1∪O2∪O3...
==> 且 O i O_i Oi 的所有元素都等价;
任意一个 a , b ∈ O i ; a ∼ b a,b in O_i; a sim b a,b∈Oi;a∼b
2.6 行列式 d e t ( A ) det(A) det(A)
-
定义:
-
d
e
t
(
M
)
det(M)
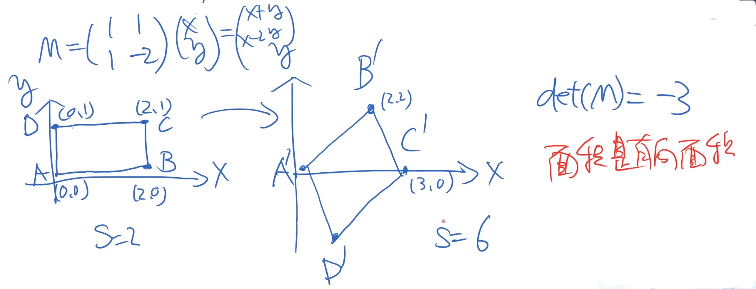
det(M)可以表示线性变换之后的体积元之比。【非常规定义】
-
d
e
t
(
M
)
det(M)
det(M)可以表示线性变换之后的体积元之比。【非常规定义】
-
d e t ( A B ) = d e t ( A ) d e t ( B ) det(AB) = det(A)det(B) det(AB)=det(A)det(B)
三、特征值与特征向量
3.1 特征值与特征向量
-
定义:
-
物理意义:
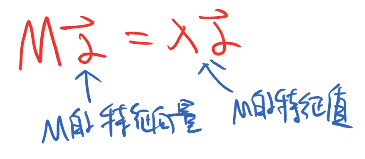
被线性变换之后,方向不变的矢量是特征矢量。
特征向量构成用于描述线性变换的基底,可将线性变换对角化。 -
特征值和特征向量的性质:
- 相同的特征值构成的特征向量,可以构成一个子空间
- 不同特征值的特征向量详细无关。
-
相似矩阵具有相同的特征值
- 举例证明:
-
M
=
K
−
1
N
K
;
M
,
N
代
表
相
同
的
线
性
变
换
M=K^{-1} N K; quad M,N代表相同的线性变换
M=K−1NK;M,N代表相同的线性变换
M α ⃗ = λ i α ⃗ N β ⃗ = λ i β ⃗ M vec{alpha} = lambda_i vec{alpha} qquad N vec{beta} = lambda_i vec{beta} Mα=λiαNβ=λiβ
M α ⃗ = λ i α ⃗ K − 1 N K α ⃗ = λ i α ⃗ N K α ⃗ = λ i K α ⃗ → β ⃗ = K α ⃗ N β ⃗ = λ i β ⃗ M vec{alpha} = lambda_i vec{alpha}\ K^{-1} N K vec{alpha} = lambda_i vec{alpha} \ N K vec{alpha} = lambda_i K vec{alpha} \ rightarrow vec{beta} = K vec{alpha} \ N vec{beta} = lambda_i vec{beta} Mα=λiαK−1NKα=λiαNKα=λiKα→β=KαNβ=λiβ
所以特征值相同。
3.2 特征值的计算
M α ⃗ = λ i α ⃗ ( M − λ i I ) α ⃗ = 0 → d e t ( M − λ i I ) = 0 M vec{alpha} = lambda_i vec{alpha} \ (M - lambda_i I) vec{alpha} = 0\ rightarrow det(M - lambda_i I) = 0 Mα=λiα(M−λiI)α=0→det(M−λiI)=0
- 1)证明:若
M
∼
N
;
则
d
e
t
(
M
−
λ
I
)
=
d
e
t
(
N
−
λ
I
)
M sim N; 则det(M-lambda I)=det(N-lambda I)
M∼N; 则det(M−λI)=det(N−λI)
d e t ( N − λ I ) = d e t ( C − 1 M C − λ I ) = d e t ( C − 1 M C − C − 1 λ I C ) = d e t ( C − 1 ) d e t ( M − λ I ) d e t ( C ) det(N-lambda I) = det(C^{-1}MC - lambda I) \ =det(C^{-1}MC - C^{-1} lambda I C) \ =det(C^{-1}) det(M - lambda I) det(C) det(N−λI)=det(C−1MC−λI)=det(C−1MC−C−1λIC)=det(C−1)det(M−λI)det(C)- 因为 d e t ( C − 1 ) d e t ( C ) = 1 det(C^{-1}) det(C) = 1 det(C−1)det(C)=1
- 所以 d e t ( C − 1 ) d e t ( M − λ I ) d e t ( C ) = d e t ( M − λ I ) det(C^{-1}) det(M - lambda I) det(C) = det(M - lambda I) det(C−1)det(M−λI)det(C)=det(M−λI)
- 2)求证
d
e
t
(
M
)
=
λ
1
λ
2
λ
3
.
.
.
det(M) = lambda_1 lambda_2 lambda_3 ...
det(M)=λ1λ2λ3...
根据上述证明已知 d e t ( M − λ I ) = d e t ( N − λ I ) det(M-lambda I)=det(N-lambda I) det(M−λI)=det(N−λI)- 假设 N N N 为 λ lambda λ 对角矩阵
- 所以 d e t ( M − λ I ) = d e t ( N − λ I ) = ( λ 1 − λ ) ( λ 2 − λ ) ( λ 3 − λ ) . . . ( λ n − λ ) det(M-lambda I)=det(N-lambda I)=(lambda_1- lambda) (lambda_2- lambda) (lambda_3- lambda)...(lambda_n- lambda) det(M−λI)=det(N−λI)=(λ1−λ)(λ2−λ)(λ3−λ)...(λn−λ)
- 令 λ = 0 lambda = 0 λ=0
- 所以 d e t ( M ) = λ 1 λ 2 λ 3 . . . det(M) = lambda_1 lambda_2 lambda_3 ... det(M)=λ1λ2λ3...
3.3 线性代数核心定理
五个互为充分必要条件的核心定理:
- M 可 逆 ( 存 在 M − 1 ) M 可逆(存在M^{-1}) M可逆(存在M−1)
- d e t ( M ) ≠ 0 det(M) neq 0 det(M)=0
- r ( M ) = n ; M 满 秩 r(M) = n; qquad M满秩 r(M)=n;M满秩
- 任何 λ i ≠ 0 ; 0 可 以 作 为 特 征 值 , 不 能 作 为 特 征 向 量 。 lambda_i neq 0; qquad 0可以作为特征值,不能作为特征向量。 λi=0;0可以作为特征值,不能作为特征向量。
-
k
e
r
(
M
)
=
0
;
M
的
核
ker(M)=0; qquad M的核
ker(M)=0;M的核
- M V ⃗ = 0 ⃗ ; V ⃗ ∈ k e r ( M ) Mvec{V} = vec{0}; quad vec{V} in ker(M) MV=0;V∈ker(M)
3.4 欧式空间与闵氏空间
- 欧式空间
- n 维 线 性 空 间 + 点 积 = 欧 式 空 间 n 维线性空间 + 点积=欧式空间 n维线性空间+点积=欧式空间
- ( v 1 ⃗ , v 2 ⃗ ) = a 1 b 1 + a 2 b 2 + . . . + a n b n (vec{v_1}, vec{v_2})=a_1b_1 + a_2b_2 + ...+a_nb_n (v1,v2)=a1b1+a2b2+...+anbn
- 闵氏空间
-
假
设
令
v
1
⃗
=
(
Δ
t
1
,
Δ
x
1
,
Δ
y
1
,
Δ
z
1
)
v
2
⃗
=
(
Δ
t
2
,
Δ
x
2
,
Δ
y
2
,
Δ
z
2
)
假设令 vec{v_1} = (Delta t_1,Delta x_1,Delta y_1,Delta z_1) \ vec{v_2} = (Delta t_2,Delta x_2,Delta y_2,Delta z_2)
假设令v1=(Δt1,Δx1,Δy1,Δz1)v2=(Δt2,Δx2,Δy2,Δz2)
则 ( v 1 ⃗ , v 2 ⃗ ) = − Δ t 1 Δ t 2 + Δ x 1 Δ x 2 + Δ y 1 Δ y 2 + Δ z 1 Δ z 2 则 (vec{v_1}, vec{v_2})=-Delta t_1Delta t_2 + Delta x_1Delta x_2 + Delta y_1Delta y_2+ Delta z_1Delta z_2 则(v1,v2)=−Δt1Δt2+Δx1Δx2+Δy1Δy2+Δz1Δz2
-
假
设
令
v
1
⃗
=
(
Δ
t
1
,
Δ
x
1
,
Δ
y
1
,
Δ
z
1
)
v
2
⃗
=
(
Δ
t
2
,
Δ
x
2
,
Δ
y
2
,
Δ
z
2
)
假设令 vec{v_1} = (Delta t_1,Delta x_1,Delta y_1,Delta z_1) \ vec{v_2} = (Delta t_2,Delta x_2,Delta y_2,Delta z_2)
假设令v1=(Δt1,Δx1,Δy1,Δz1)v2=(Δt2,Δx2,Δy2,Δz2)
最后
以上就是机灵跳跳糖最近收集整理的关于机器学习---数学基础(三、线性代数)一、线性空间与线性变换二、矩阵、等价类和行列式三、特征值与特征向量的全部内容,更多相关机器学习---数学基础(三、线性代数)一、线性空间与线性变换二、矩阵、等价类和行列式三、特征值与特征向量内容请搜索靠谱客的其他文章。
![[傅里叶变换及其应用学习笔记] 十二. 速降函数、分布速降函数分布(distribution)匹配运算](https://www.shuijiaxian.com/files_image/reation/bcimg16.png)
](https://www.shuijiaxian.com/files_image/reation/bcimg17.png)






发表评论 取消回复