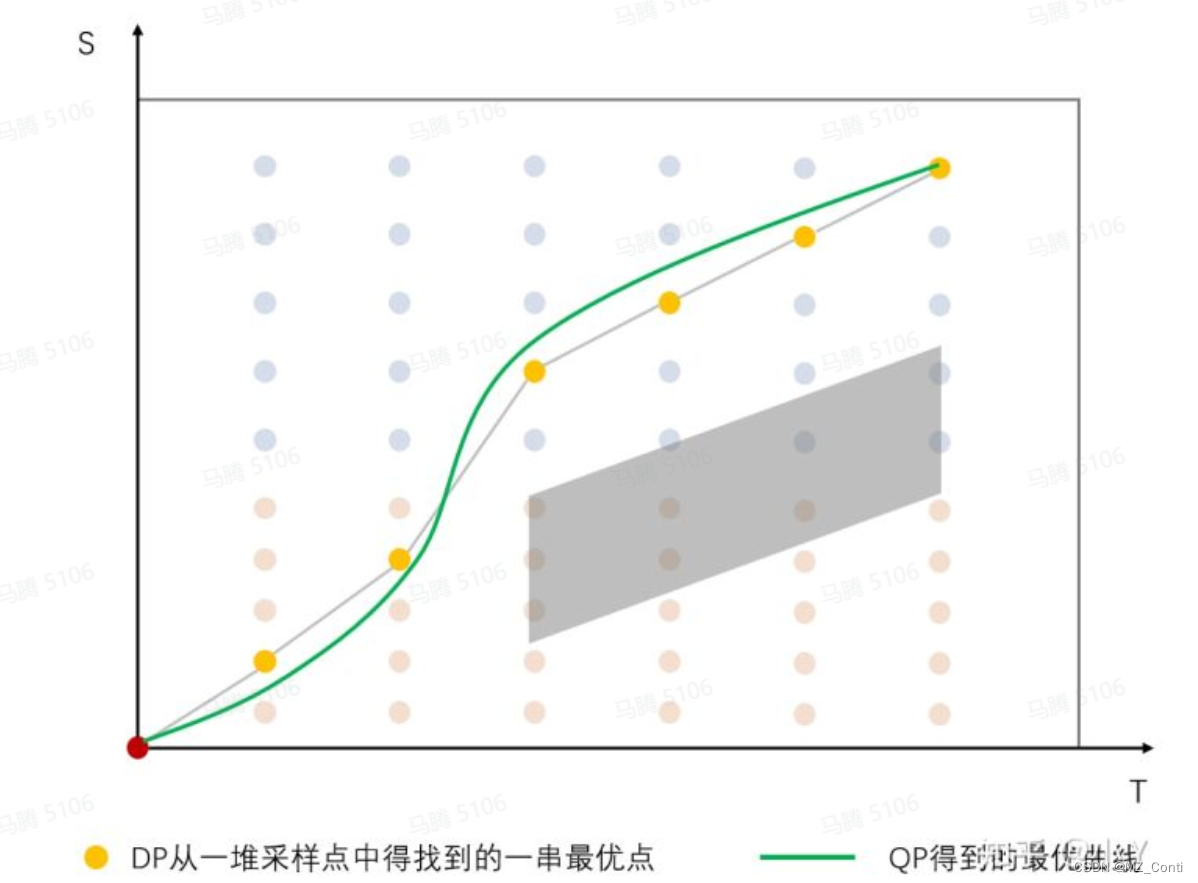
根据DP计算得到的速度粗解,在选定的Drivable Boundary 的范围内,对速度曲线进行优化。
3.14.1 数学原理
与之前介绍的Piecewise jerk speed optimizer 完全类似,系统将纵向运动设计为一个等jerk的三阶系统:
-
纵向加加速度横值
-
加速度一阶连续
-
速度二阶连续
-
位置三阶连续
因此,优化的目的就是找到纵向位置的最优离散控制序列,使得在整个ST boundary 时间上的cost 最低,同时也要满足各种约束。因此每个时间点上的纵向位置 即优化的变量。
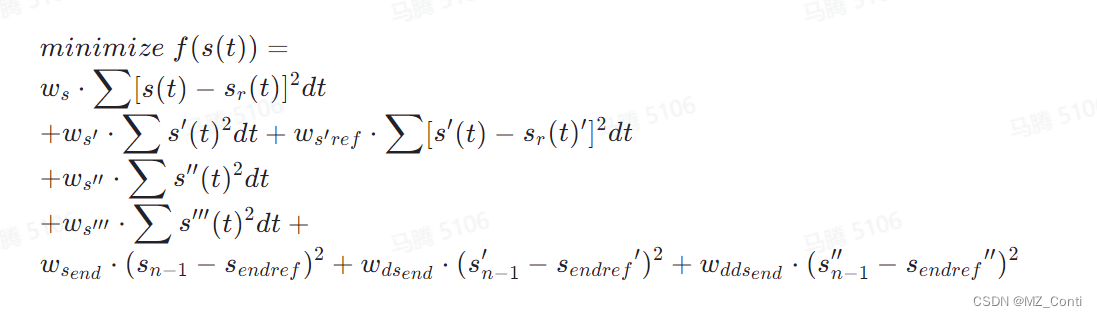
3.14.1.1 目标函数:
-
第一行:为纵向位置偏离参考位置的cost (s_r(t) 为DP 规划结果中的参考位置)
-
第二行:第一项为纵向速度的惩罚(其权重为根据Path 上对应的曲率计算的); 第二项纵向速度偏离参考速度的cost (参考速度为巡航车
最后
以上就是深情镜子最近收集整理的关于Apollo - PIECEWISE_JERK_SPEED_OPTIMIZER数学原理的全部内容,更多相关Apollo内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复