论文:《Keep your Eyes on the Lane: Real-time Attention-guided Lane Detection》
地址:https://arxiv.org/abs/2010.12035v2
代码:https://github.com/lucastabelini/LaneATT
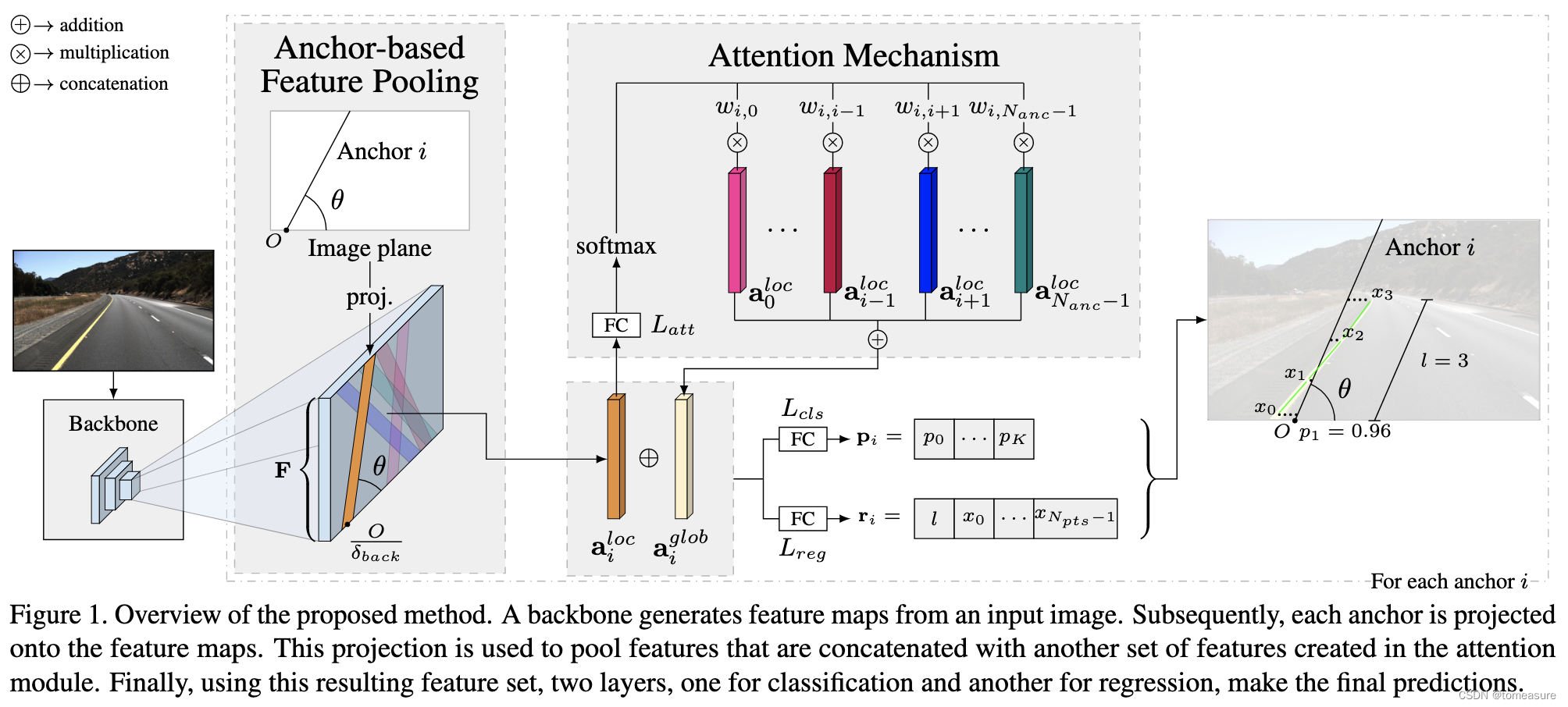
整体结构
车道线的表示方式
L a n e = { ( x i , y i ) } i = 0 N p t s − 1 , y i = i ⋅ H i m a g e N p t s − 1 Lane={(x_i,y_i)}^{N_{pts}-1}_{i=0}, y_i=icdotfrac{H_{image}}{N_{pts}-1} Lane={(xi,yi)}i=0Npts−1, yi=i⋅Npts−1Himage
s: 起始点 index
e: 终止点 index
anchor 的表示方式
- 位于图像边缘的初始点 O = ( x o r i g , y o r i g ) O=(x_{orig}, y_{orig}) O=(xorig,yorig);
- 角度 θ theta θ;
模型输出
- K + 1 K+1 K+1 个概率值,对应 K 条车道线,1 个 background;
- ` N p t s N_{pts} Npts 个偏移量,以衡量 prediction 与 anchor 之间的水平距离;
- 长度 l l l,具体指有效偏移量的个数
起始点 s 被定义为 y o r i g y_{orig} yorig;
终止点 e 被定义为 e = s + ⌊ l ⌋ − 1 e=s+lfloor lrfloor -1 e=s+⌊l⌋−1;
损失函数
Focal Loss 与 Smooth L1 Loss
骨干网
一般的CNN都可以,原文中又用了一个 1 × 1 1times 1 1×1 的 Conv 对骨干网输出的特征通道( F b a c k ∈ R C F ′ × H F × W F pmb{F}_{back}in mathbb{R}^{C'_Ftimes H_Ftimes W_F} Fback∈RCF′×HF×WF)进行了缩减( F ∈ R C F × H F × W F pmb{F}in mathbb{R}^{C_Ftimes H_Ftimes W_F} F∈RCF×HF×WF)。
Anchor-based Feature Pooling
将图像上的 Anchor ( x o r i g , y o r i g , θ ) (x_{orig},y_{orig},theta) (xorig,yorig,θ) 投影到特征(得到 { ( x j , y j ) ∣ y j = 0 , 1 , 2 , . . . , H F − 1 } {(x_j,y_j) | y_j=0,1,2,...,H_F-1} {(xj,yj) ∣ yj=0,1,2,...,HF−1})上:
x j = ⌊ 1 tan θ ( y j − y o r i g s t r i d e b a c k b o n e ) + x o r i g s t r i d e b a c k b o n e ⌋ y j = 0 , 1 , 2 , . . . , H F − 1 begin{aligned} x_j&=lfloorfrac{1}{tantheta}(y_j-frac{y_{orig}}{stride_{backbone}})+frac{x_{orig}}{stride_{backbone}}rfloor\ y_j&=0, 1, 2, ..., H_F-1 end{aligned} xjyj=⌊tanθ1(yj−stridebackboneyorig)+stridebackbonexorig⌋=0, 1, 2, ..., HF−1
Attention 方案
利用局部 anchor 特征构建辅助 anchor 特征,以集成全局信息。
w i , j = { softmax ( L a t t ( a i l o c a l ) ) j , if j < i 0 , if j = i softmax ( L a t t ( a i l o c a l ) ) j − 1 , if j > i a i g l o b a l = Σ j w i , j a j l o c a l begin{aligned} w_{i,j}&=begin{cases} text{softmax}(L_{att}(pmb{a}^{local}_i))_j,&text{if} j<i\ 0,&text{if} j=i\ text{softmax}(L_{att}(pmb{a}^{local}_i))_{j-1},&text{if} j>i\ end{cases}\ pmb{a}^{global}_{i}&=Sigma_{j}w_{i,j}pmb{a}^{local}_{j} end{aligned} wi,jaiglobal=⎩ ⎨ ⎧softmax(Latt(ailocal))j,0,softmax(Latt(ailocal))j−1,if j<iif j=iif j>i=Σjwi,jajlocal
- 符号的含义可见上图;
- 实际使用的是矩阵形式;
最后
以上就是真实海燕最近收集整理的关于车道线检测-LaneATT 论文学习笔记的全部内容,更多相关车道线检测-LaneATT内容请搜索靠谱客的其他文章。








发表评论 取消回复