我们在上一个教程中前面的例子学习了使用Sobel边缘检测。原理是利用边缘区域像素值的跳变。通过求一阶导数,可以使边缘值最大化。如下图所示:
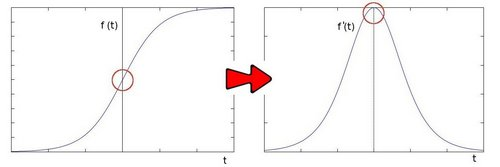
那么,如果求二阶导数会得到什么呢?
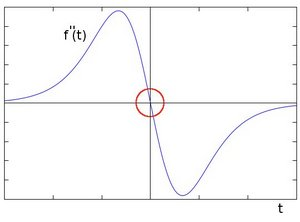
可以观察到二阶导数为0的地方。因此,可以利用该方法获取图像中的边缘。然而,需要注意的是二级导数为0的不只出现在边缘地方,还可能是一些无意义的位置,根据需要通过滤波处理该情况。
二阶微分
现在我们来讨论二阶微分,它是拉普拉斯算子的基础,与微积分中定义的微分略有不同,数字图像中处理的是离散的值,因此对于一维函数的一阶微分的基本定义是差值:
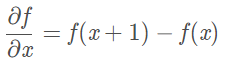
类似的,二阶微分定义为:

将一维函数扩展到二维:
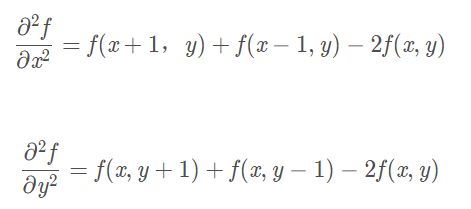
二阶微分的定义保证了以下几点:
1、在恒定灰度区域的微分值为0
2、在灰度台阶或斜坡的起点处微分值非零
可以看出,二阶微分可以检测出图像的边缘、增强细节
拉普拉斯算子
从上面的解释,可以看出二阶导数可以拥有边缘检测。由于图像是二维的,因此需要分别获取两个方向的导数。这里使用的是拉普拉斯算子来进行近似。
拉普拉斯算子用下面公式定义:
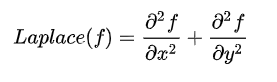
其中:
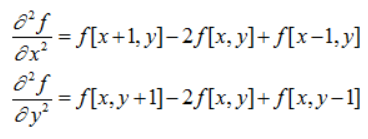
可以用多种方式将其表示为数字形式。对于一个3*3的区域,一般情况下被推荐最多的形式是:

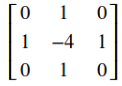
实现上式的滤波器模板为:
我们可以发现,拉普拉斯算子不需要向Sobel算子那样分别对x,y方向进行处理,它可以直接处理,现在我们来看看OpenCV中的拉普拉斯算子的函数原型:
dst = cv2.Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])
如果看了上一个教程中对于Sobel算子的介绍,这里的参数应该不难理解。
前两个是必须的参数:
第一个参数是需要处理的图像;
第二个参数是图像的深度,-1表示采用的是与原图像相同的深度。目标图像的深度必须大于等于原图像的深度;
其后是可选的参数:
dst不用解释了;
ksize是算子的大小,必须为1、3、5、7。默认为1。
scale是缩放导数的比例常数,默认情况下没有伸缩系数;
delta是一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中;
borderType是判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
我们来看代码:
view plaincopy to clipboardprint?
import cv2
import numpy as np
img = cv2.imread("pie.png")
dst = cv2.Laplacian(img,cv2.CV_16S,ksize=3)
dst = cv2.convertScaleAbs(dst)
cv2.imshow("img",img)
cv2.imshow("res",dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
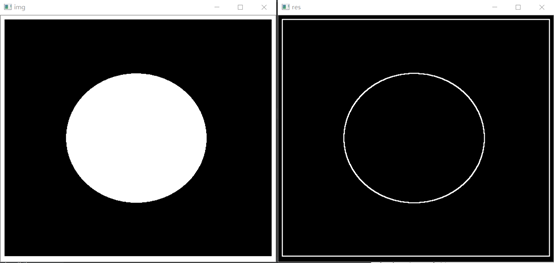
现在可以拿这个结果对比上一个教程的结果了,我们发现,这个结果要比上一个教程的结果好的多,对于边缘检测没有大的偏差。
然而事实上,这只是对于简单的图像而言,而对于一幅复杂的图像,那么边缘提取就有点爱莫能助了,我们来看代码:
view plaincopy to clipboardprint?
import cv2
import numpy as np
img = cv2.imread("cat.jpg")
dst = cv2.Laplacian(img,cv2.CV_16S,ksize=3)
dst = cv2.convertScaleAbs(dst)
cv2.imshow("img",img)
cv2.imshow("res",dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
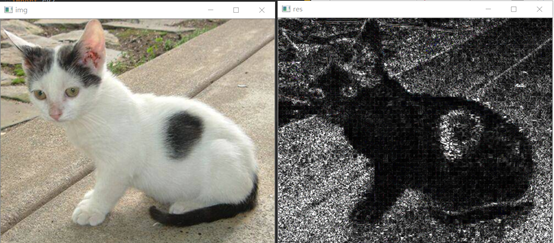
可以看到,对于较为复杂的图像,拉普拉斯算子的效果也并不是很好,由于二阶微分一定的局限性,目前的边缘检测还不够完美,我们需要一种综合的算法,而这将在下一个教程中介绍到。
查看文章汇总页https://blog.csdn.net/weixin_44237705/article/details/107864965
更多openvino技术信息可以入群交流~

最后
以上就是谨慎翅膀最近收集整理的关于【转载】OpenCV-Python系列之拉普拉斯算子(二十四)的全部内容,更多相关【转载】OpenCV-Python系列之拉普拉斯算子(二十四)内容请搜索靠谱客的其他文章。








发表评论 取消回复