现在看来当时做的这个东西不是很好,大家随便看看就行,仅供参考......
里面带有视频字样的,说明不是图片是个视频。
视频我单独放下一个(三)里面。
这个是主要需要做的一些部分
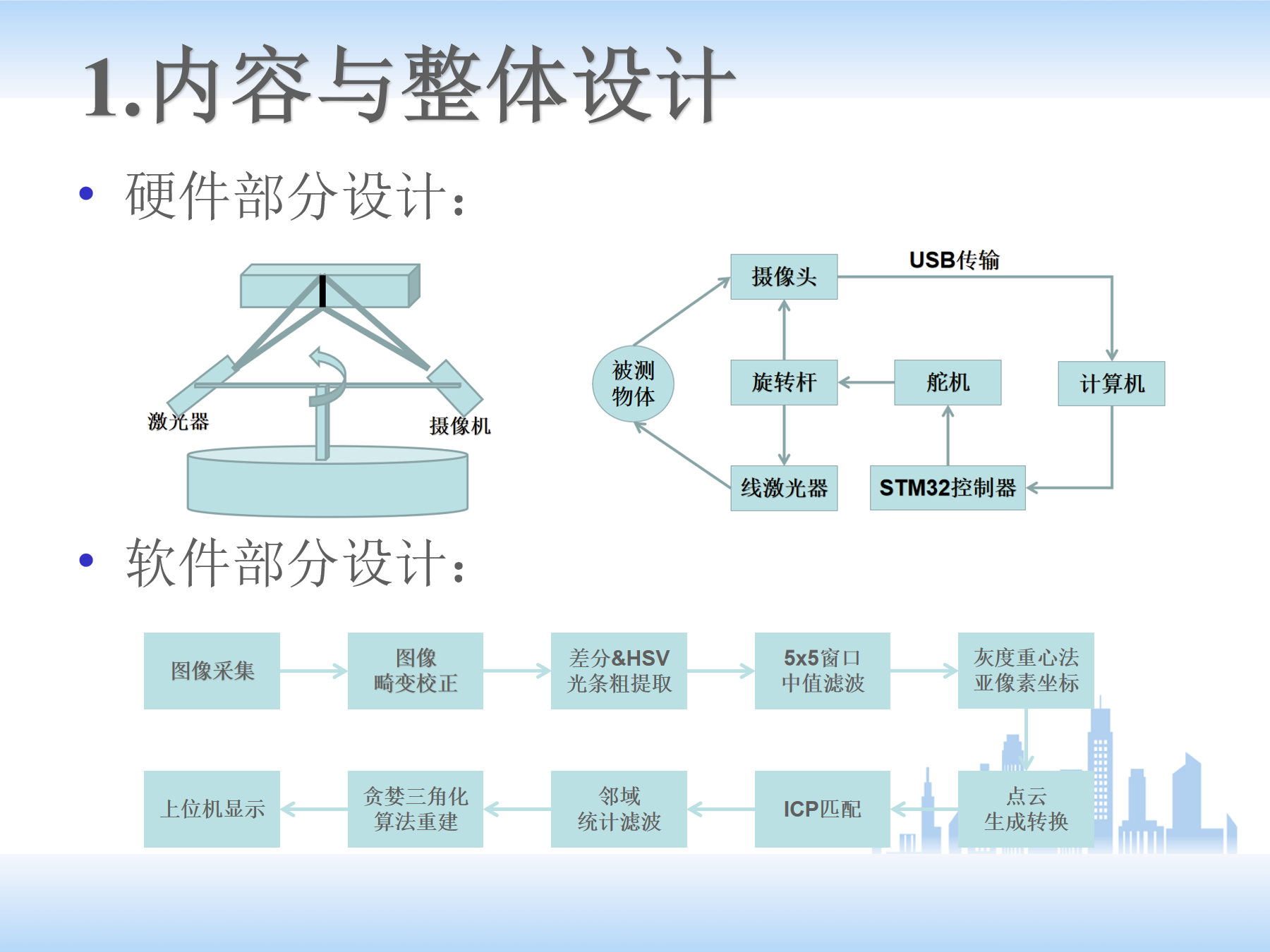
(1)下面是总体的概述
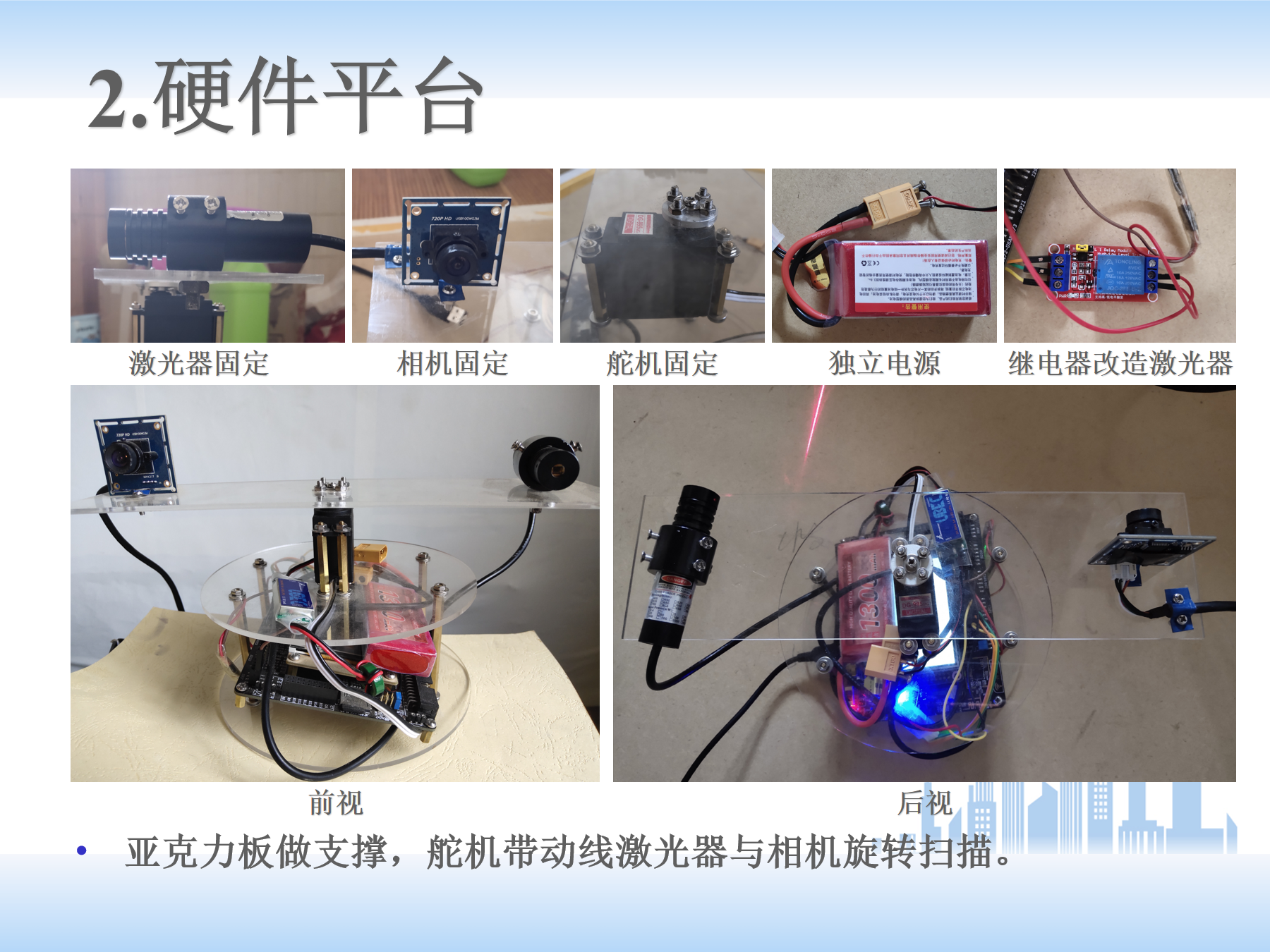
(2)下面搭出来的硬件,我硬件知识稀烂,大家不要学我......

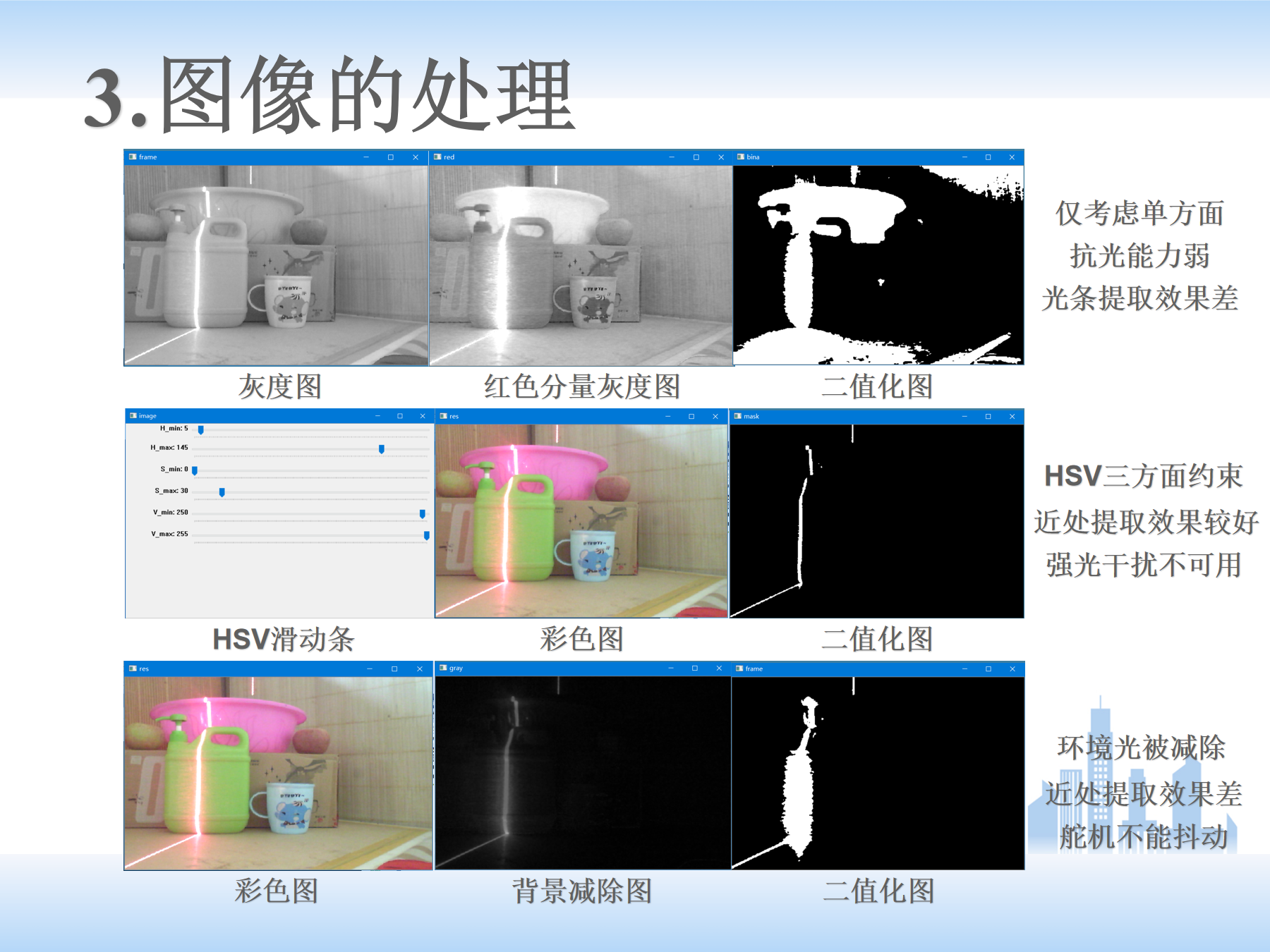
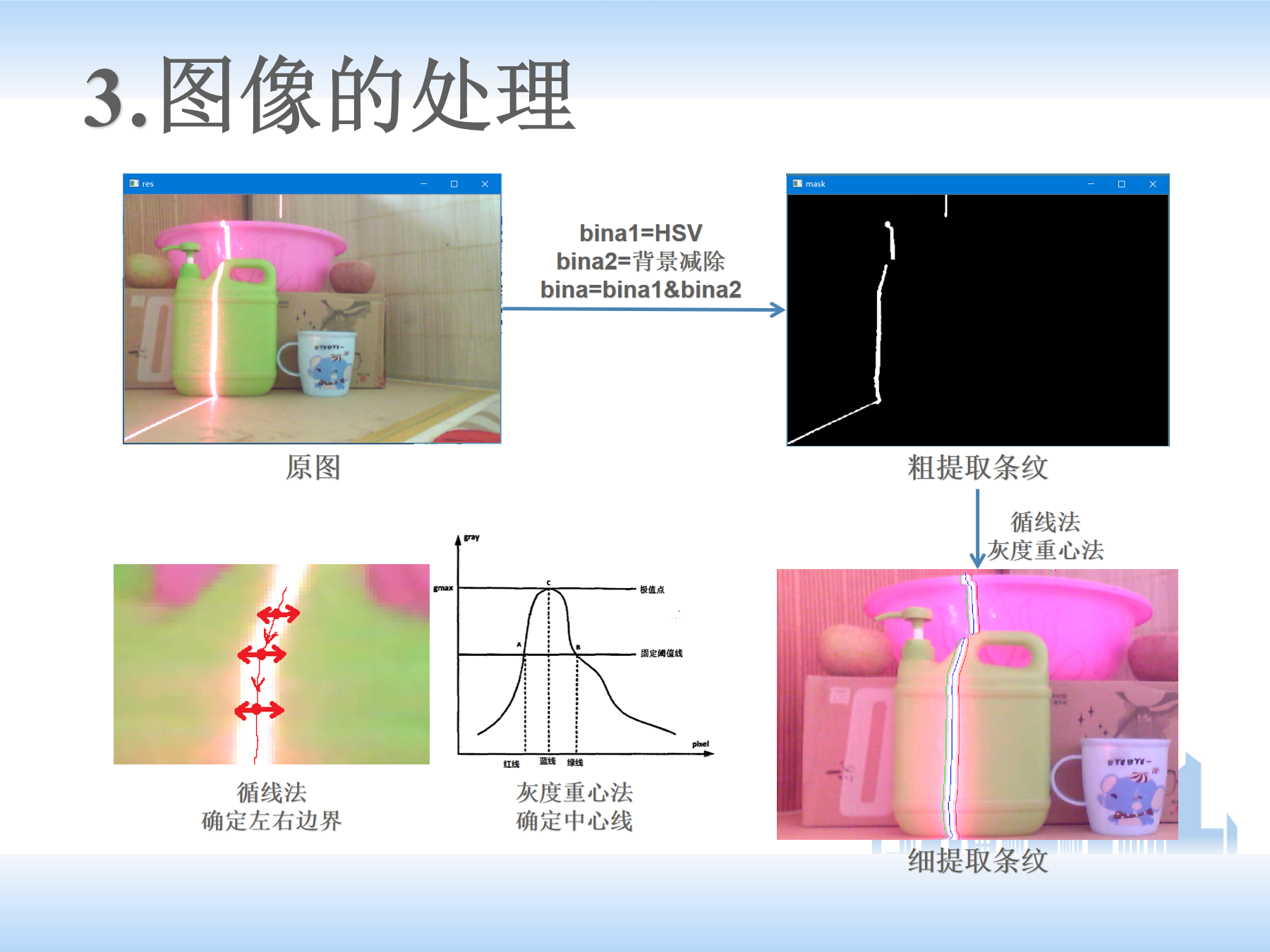
(3)下面是最重要的激光条的提取。二值化和灰度提取肯定不行,图像简直没法看;后来用的HSV方法过滤阳光,用Python写了个滑动条的小程序,效果还凑活,但距离远了或者遇到强光就不太行;后来试了下两幅图像相减(有激光条的图像减去没有激光条的背景图像),发现距离近了效果变差。最后,将两种方法结合了一下,先用HSV过滤的方法得到bina1,再用背景减除的方法得到bina2,这两幅结果图再进行“与”操作,得到的激光条比较干净。再通过左右循线找边界以及对原彩色/灰度图使用用灰度重心法得到单像素的激光条纹。

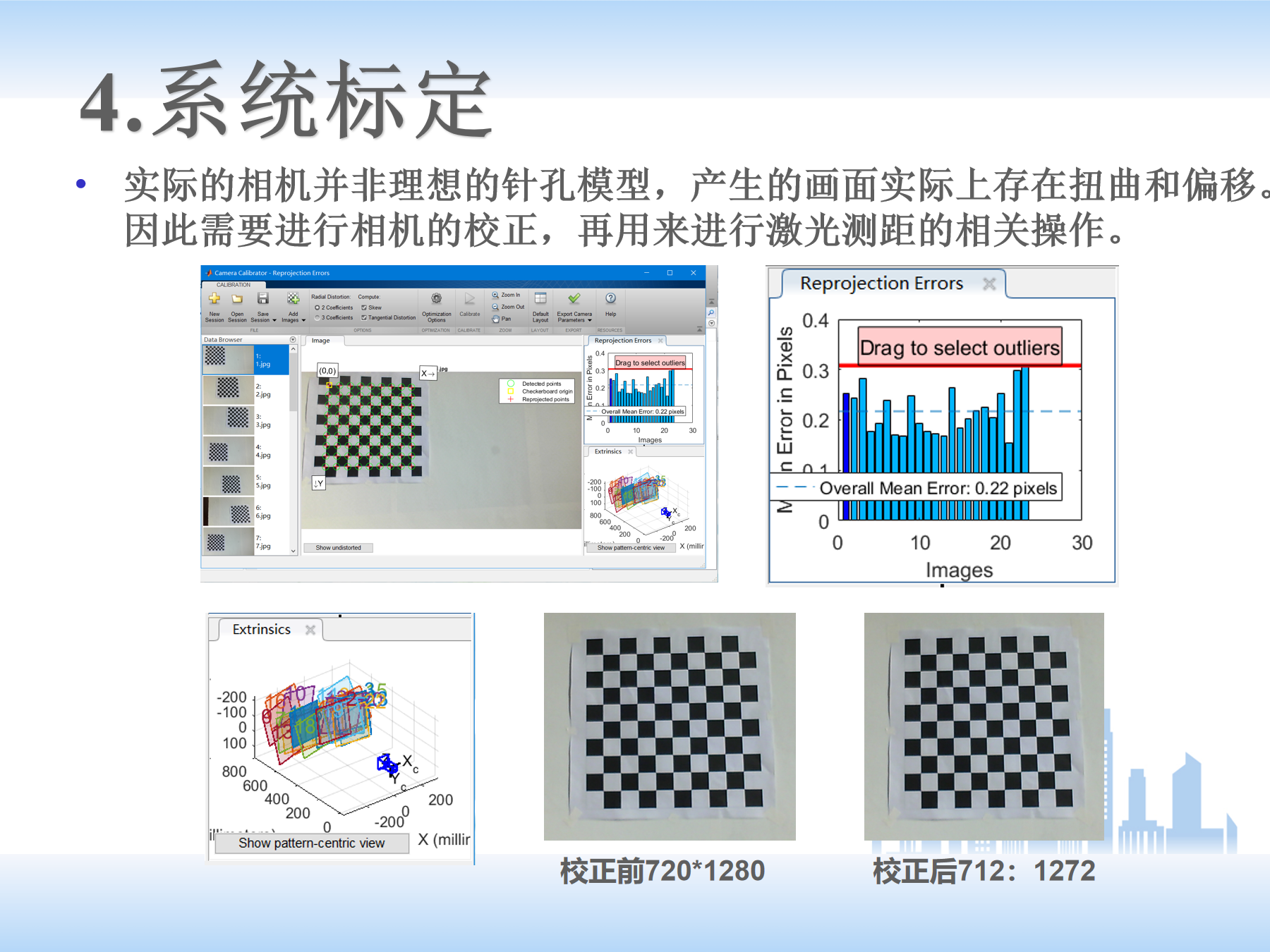
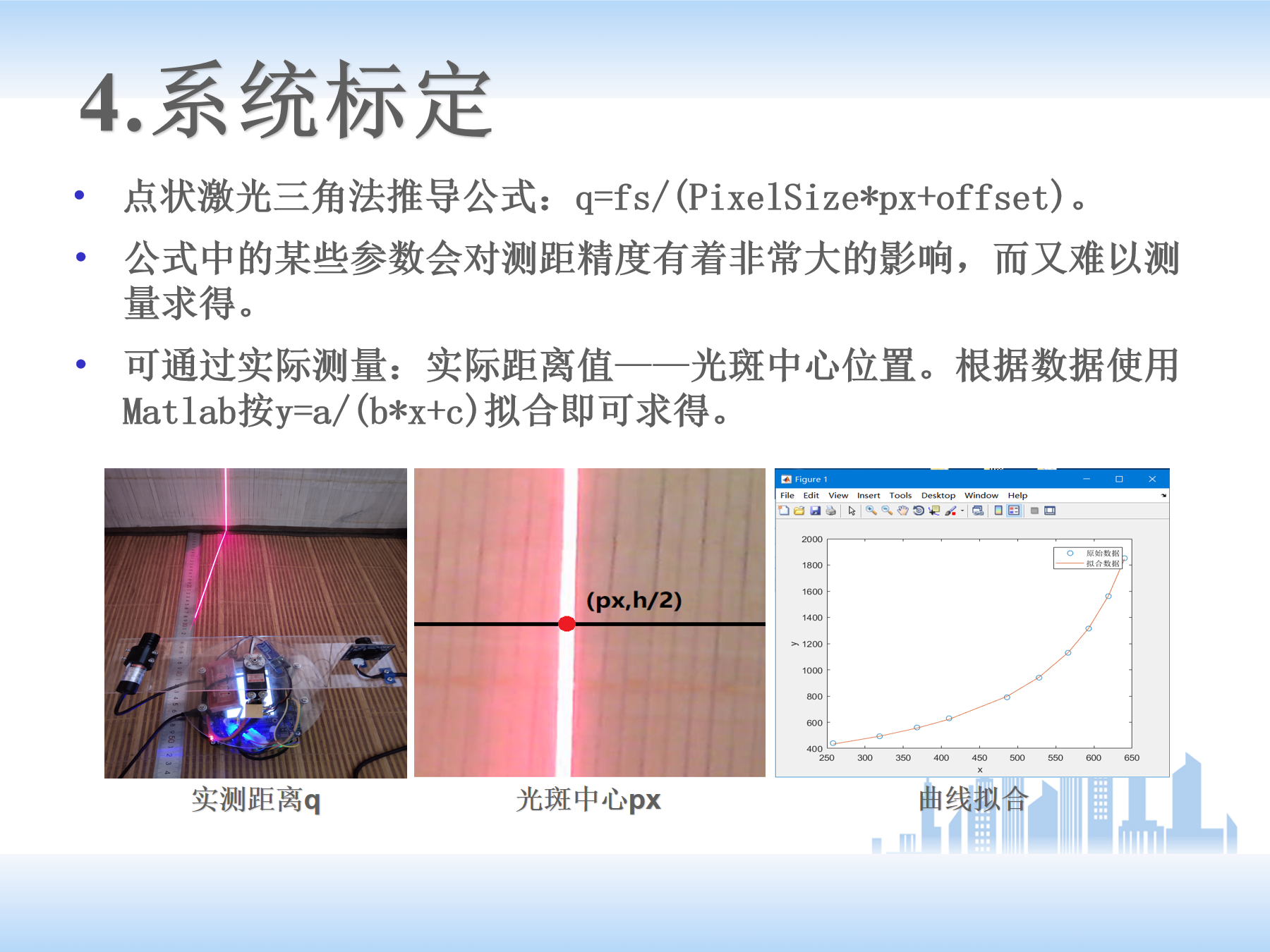
(4)下面是标定部分。激光中心坐标能够实现提取后,需要后续进行转换,以实现二维图像坐标到三维点云数据的转换,但转换前需要对整个系统进行标定校正。相机需要标定,因为相机有畸变;平台需要标定,因为由三角测距法的公式(求取被测物上任意点到扫描平台基线中心的距离),一方面来说,这些参数值有些能测出来但未必准确;另一方面,有些参数值用正常手段没办法测量。这里用了拟合的方法,通过几组实际测量的对应参数,来确定自己平台的参数。
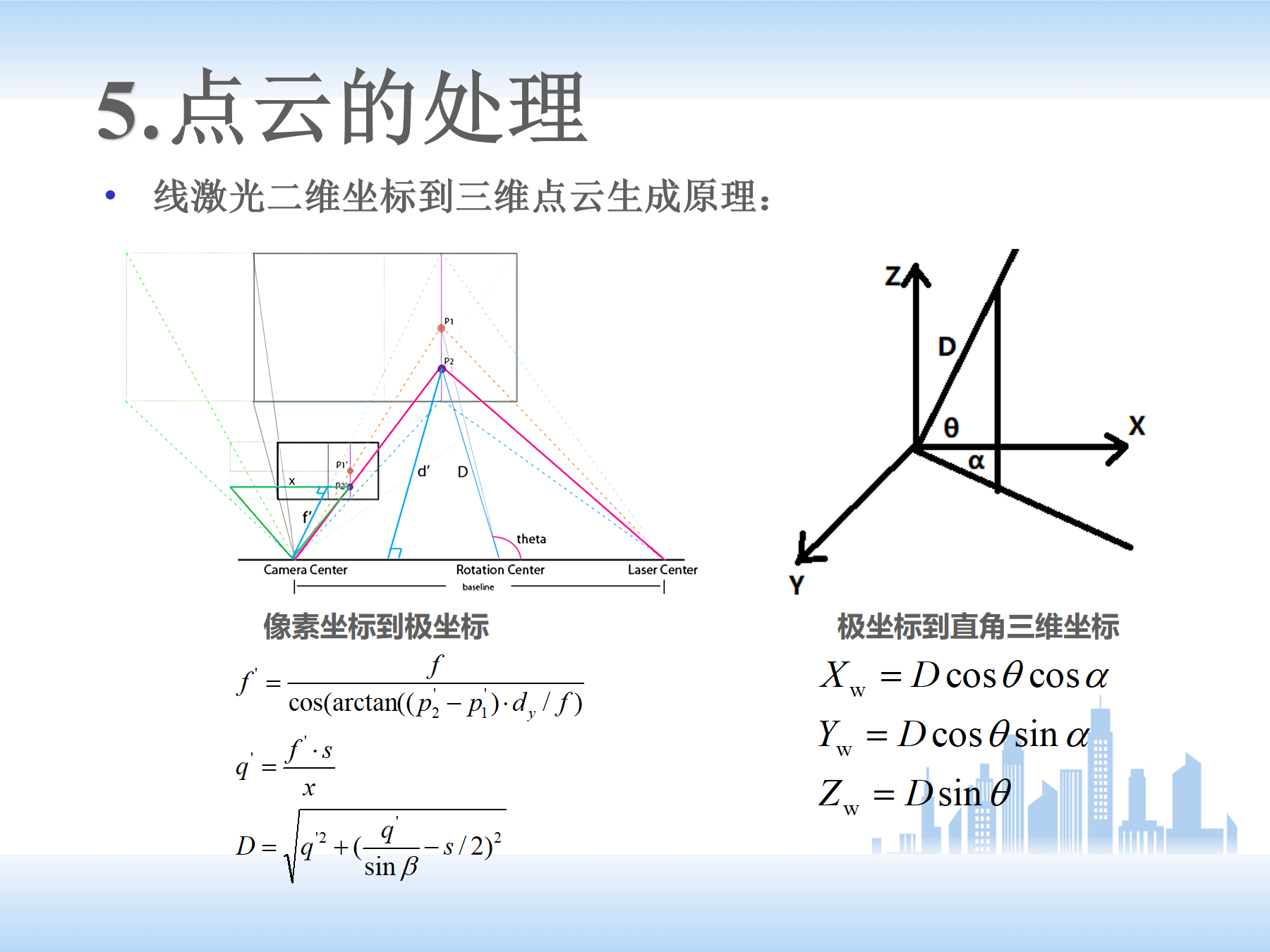
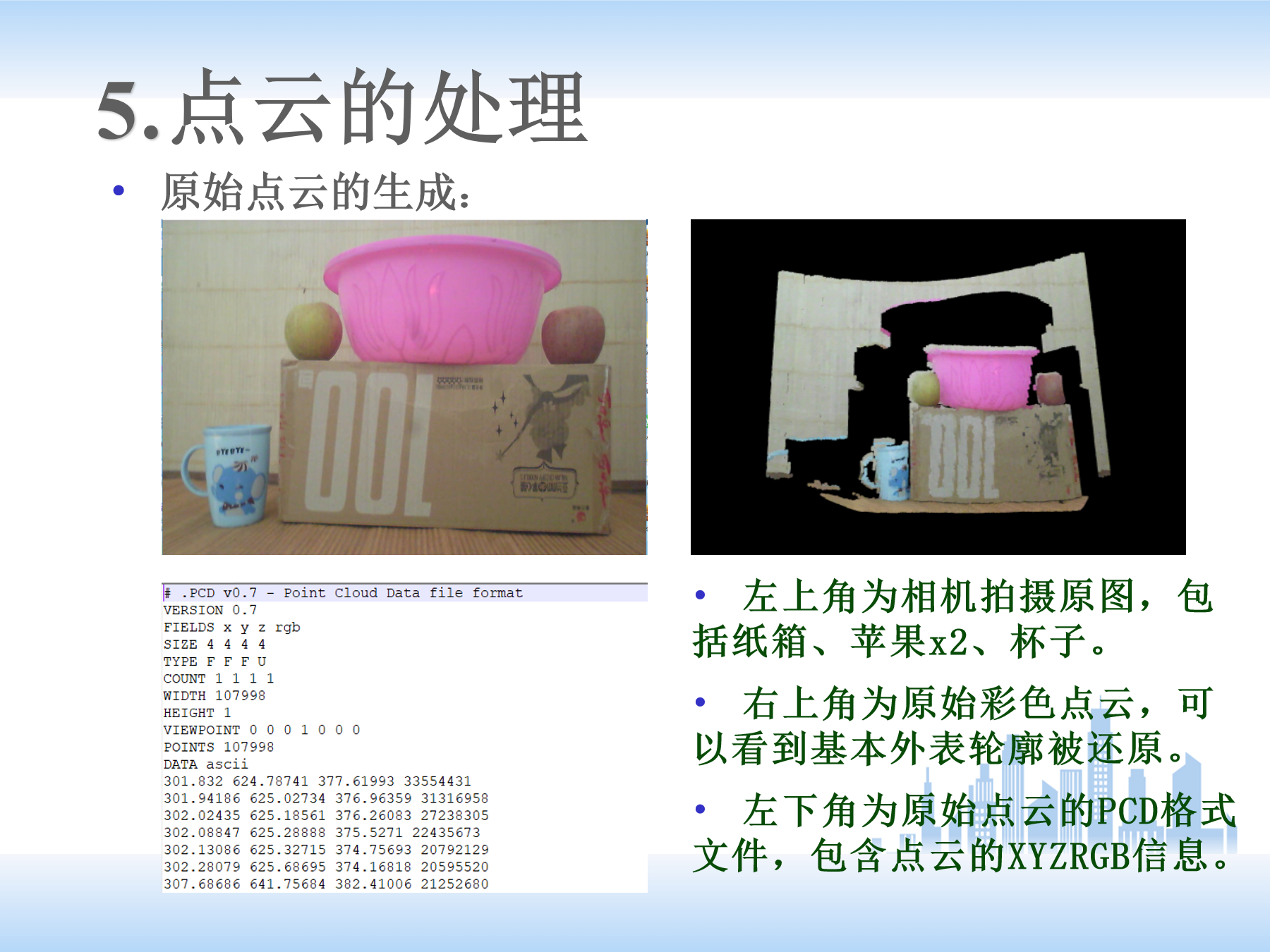
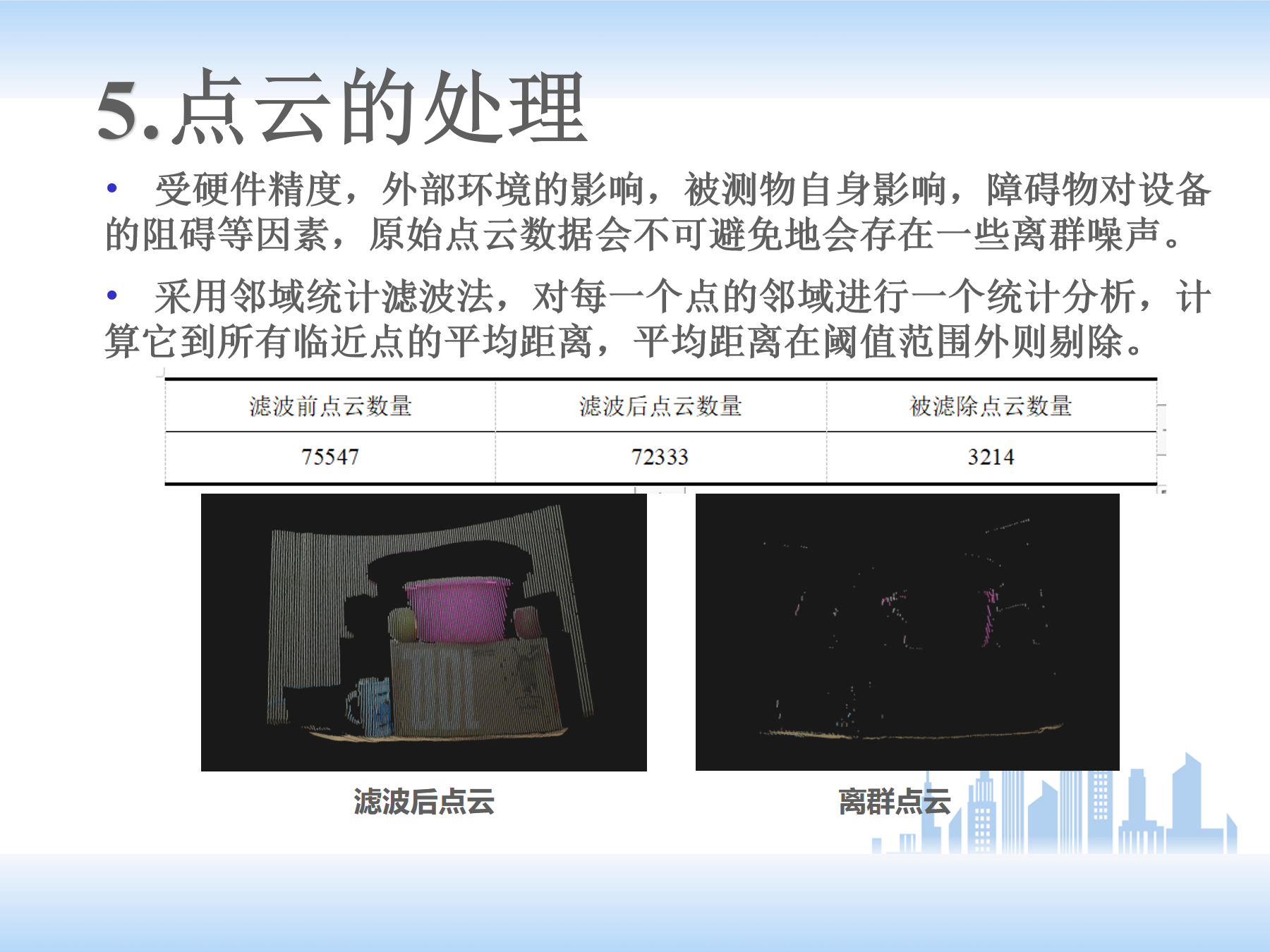
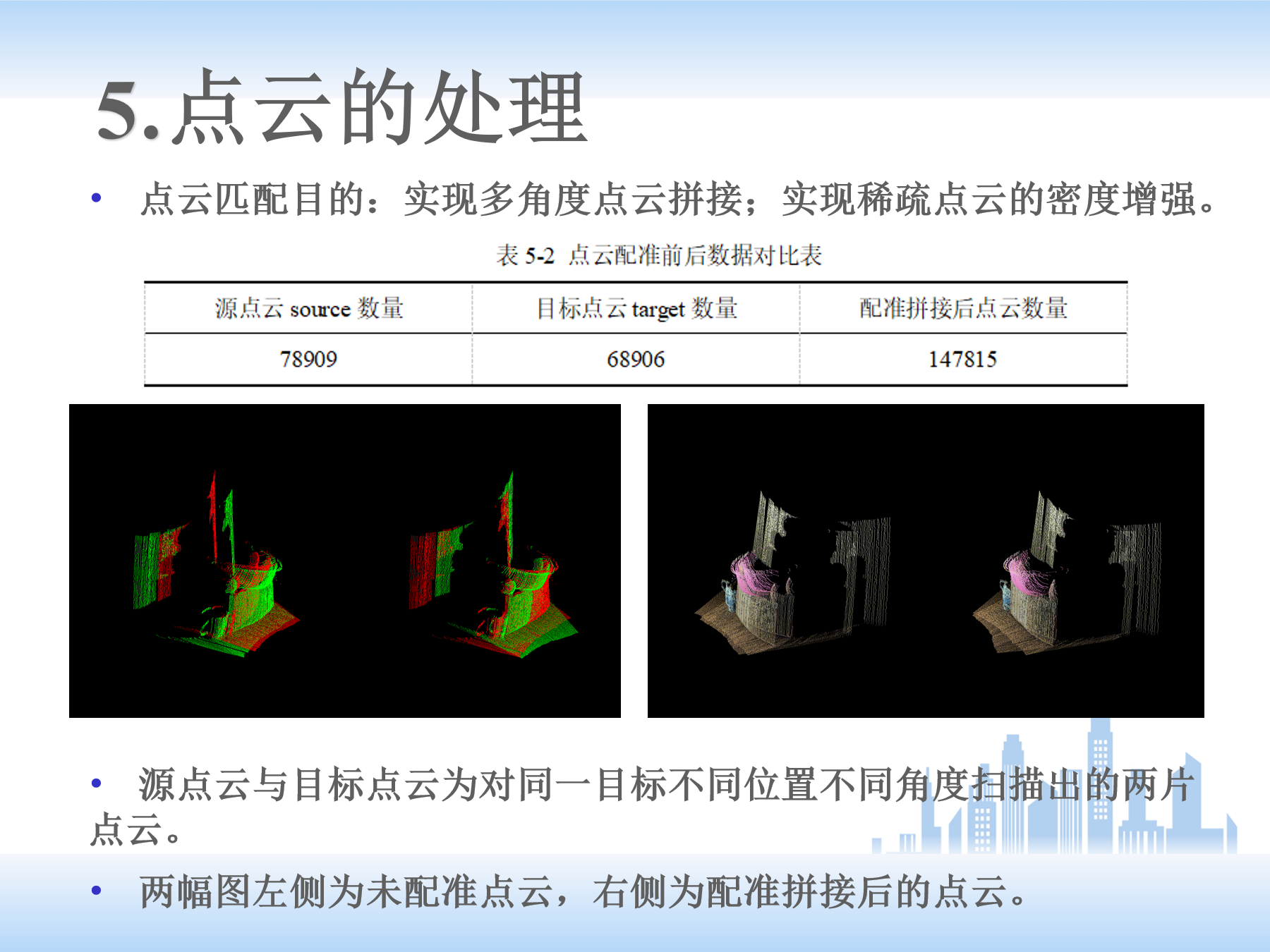
(5)下面是点云的处理。正常顺序是先搭建平台,然后标定,后边提取线激光,得到二维坐标,再根据公式转换成三维的点云数据。再调用PCL点云库进行后续处理。



最后
以上就是冷艳枕头最近收集整理的关于激光扫描成像(二)的全部内容,更多相关激光扫描成像(二)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复