激光距离选通成像技术的研究进展 - 知乎
自1944年德国首先装备主动红外夜视仪并在夜战中取得优势之后,夜视技术获得了迅速的发展。但主动红外夜视技术由于自身的易暴露性,自上世纪 70年代后逐渐被微光夜视和热成像等被动夜视技术所取代。上世纪 90 年代以后,由于激光技术、光电探测器及电子信号处理技术的发展,以激光距离选通成像技术为代表的主动红外夜视技术又焕发出新的生机。与被动夜视系统相比,激光距离选通成像系统(也称为激光成像雷达)具有作用距离远、分辨力和信噪比高、能显示目标细节且图像信杂比高、可在雨、雪、雾等恶劣天气环境下工作的特点。因此,被应用于军事侦察、搜救、监视、水下探测等方面。
一、国外的研究进展
1.1国外开展该研究的主要公司和机构
激光距离选通成像技术得到了世界上各大军事强国的重视,许多单位和机构都对该技术进行了深入研究,如瑞典国防研究中心( FOI、英国的 BAE 公司、美国的 INTEVAC公司和 Goodrich 公司 SUI 小组、加拿大的 OBZ-ERV 公司、德国光电子与模式识别研究中心 (RIOPR, Research institute for optronics and pattern recognition)等,而且许多单位已经有装备研制成功。
1.2研究和应用的进展
2004年,加拿大 Obzerv Technologies 公司开发了一套激光距离选通成像系统ATV2000i。ATV2000i 是当前较先进的监控摄像机之一,其主要由近红外脉冲激光二极管光源、定制的超三代高速选通像增强相机和一个图形化用户界面组成。
ATV2000i 定型产品 ARG TV 的实验表明其在高级防卫应用中的有效性。图 1 给出 ATV-2000i 观察 1.9km 处的渔船,该渔船首先由非制冷焦平面热成像系统发现(如图 1(a)),继而由距离选通相机获取目标场景图像,由图 3(b),(c)可获得驾驶室、船舷上的名称和甲板上人员数目等目标状态和位置信息。图 2 和图 3分别给出激光选通成像与被动微光成像、雪天主动连续照明与距离选通成像的图像比较,可以看出:激光距离选通成像在观察透车/室窗成像以及恶劣天候下的成像具有比较明显的优势。

(a) 平面热成像系统; (b) ATV-2000i距离选通图像 (c) ATV-2000i 距离选通图像

图2主动选通成像与被动微光成像的比较
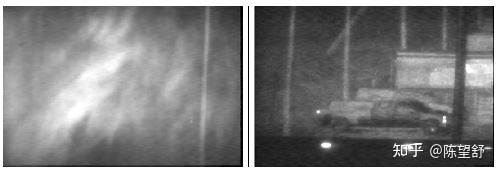
图3雪天主动连续照明和选通照明成像的比较
2005年,英国 BAE SYSTEMS 公司开发了低成本目标瞄准系统(LCTS)。LCTS 将热成像分系统、激光照明分系统、距离选通成像分系统、激光测距和目标指示分系统、GPS定位系统和自动跟踪分系统等集成在包含电子控制系统和相关软件的平台上。当热成像系统探测到目标后,由激光测距机获取目标距离信息并据此设定延迟时间,由距离选通成像系统进行主动目标辨认,GPS 定位系统根据目标距离信息对目标准确定位,以实现系统对目标的实时跟踪。
2005 -2008年,英国SELEX传感器和机载系统工资研制的双模红外探测系统,采用了一般被动式热成像+主动距离选通系统的组合。
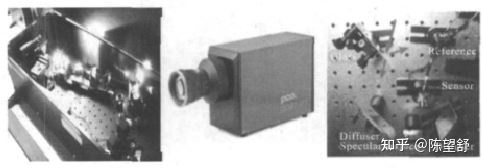
2006-2007年,德国RIOPR和瑞典FOI分别研制了短波红外激光距离选通成像实验系统见图 4,采用1.54 μm /1.57 μm波长的脉冲激光照明,探测器分别为Intevac公司的LIVAR120型TE -EBCCD和400c型TE - EBCMOS短波红外探测器。

图4德国和瑞士研制的激光距离选通成像系统
利用短波红外激光距离选通成像系统进行了非视域成像实验研究,选择墙壁和窗户玻璃作为中介反射面,实现了对街道拐角、地下车库中的人员、车牌和假目标的激光选通非视域成像。图5(a)、(b) 分别为获得距离墙面20 m 的持枪者和30m的汽车牌照图像。实验中还通过照射墙砖、混凝土和金属窗框进行成像。由于玻璃的反射率比较高,所以成像结果较好。
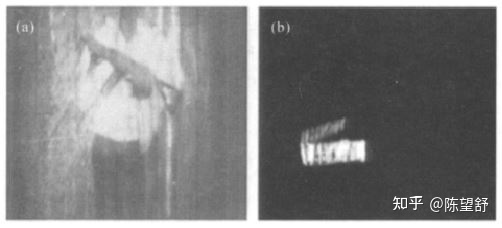
图5人和车牌非视域成像的实验图像
法德圣路易斯研究中心研究了在更大尺度上(米级)的拐角隐藏物体成像。利用门控选通技术研究了不同的照明方式在非视域领域的应用,分别是单点、面和体散射源,并通过层析投影的重建算法进行三维成像。
2007年,美国MIT Media Lab研究采用飞秒瞬态成像技术实现拐角观察的非视域成像,并进行了一系列实验研究。该项技术包括3项要素:飞秒激光器、条纹管探测器(或皮秒精度的单像素探测器以1012帧/s的帧频)以及相应的数学反演算法如图6所示。利用到达探测器的光子所携带的空间、角度和时间信息,对激光脉冲的传输过程进行多次反射路径分析(multi-path Analysis)并进行逆向推演,以确定场景中的物体各反射面的距离及相对位置关系,进而完成对场景的3D重建。
(a)飞秒激光器;(b)条纹管相机;(c)实验方案
二、国内的研究进展
在国内,虽然也有一些单位在积极开展该技术的研究,但是由于器件等原因,目前都尚处于理论研究和实验室验证阶段,和国外相比还有较大的差距。
国内在非视域成像技术方面的研究尚属于空白,但在激光距离选通成像的核心部件、关键技术以及系统应用方面已取得进展。“十五”期间北京理工大学与某公司合作,在高性能超二代像增强器的基础上, 研制出5 ns级选通门宽的选通像增强器及其高压程控电路;“十五”末期国内某研究所、北京理工大学等单位开始进行水下蓝绿激光距离选通成像技术研究;“十一五”期间某单位也开始水下激光距离选通成像技术的研究并开展了激光距离选通成像技术的应用研究;2010 年北京理工大学开始陆上近红外激光距离选通成像系统的应用研究,使现有微光夜视观察仪的作用距离提高近 1 倍。
2011 年北京理工大学开展了基于激光距离选通的非视域成像实验。实验中选用 DPL Nd: YAG 激光器(波长532 nm、脉宽采用激光20 ns、频率 20 Hz)和自研的选通 ICCD 成像系统(选通门宽 20 ns),搭建了非视域成像实验平台见图7。
图7基于激光距离选通的非视域成像系统实验装置
实验中中介面分别为干净玻璃、落灰玻璃和瓷砖,目标为 1 m×1 m 的标准靶板。实验结果表明干净玻璃的非视域图像质量要优于落灰玻璃图像,瓷砖作为中介反射面,成像效果较差。其中在 50 m 距离上通过干净玻璃和落灰玻璃刚能分辨出的线对宽度分别为 21.9 mm 和 31.0 mm,通过瓷砖在 20 m 距离上刚能分辨出的线对宽度为24.6 mm。
三、激光距离选通成像
3.1原理
激光距离选通成像属于主动成像模式,系统的工作过程如图 8(a)(b)所示:激光器发射激光脉冲对目标进行照射;照明激光脉冲在传输过程中,当部分激光能量被散射介质散射和中间场景反射回来时,接收器的选通门处于关闭状态,从而拒绝了大气后向散射及背景杂波;当目标区域反射回的激光信号到达接收器时,系统选通门打开,对目标区域进行成像,之后选通门重新关闭。
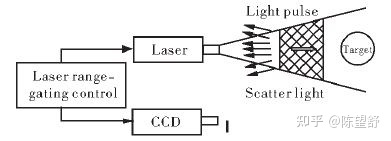
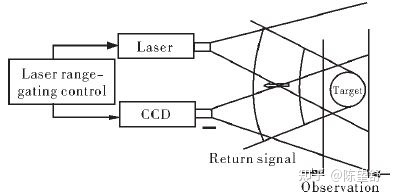
图8激光距离选通的工作示意图
3.2优点
(1)工作波长短,在相同的孔径下,激光距离选通成像系统可获得较红外热成像系统更高的图像分辨率(比中波和长波红外成像系统高出 3~6 倍);
(2)近红外成像探测器具有较小的探测器单元尺寸,在相同的光学系统焦距下,可获得更高的空间分辨力;
(3)光学系统采用光学玻璃制成,较之红外光学系统材料,在材料成本、重量和制作成本等具有优势,特别是在长焦、大孔径和连续变焦光学系统设计和制作方面更显优势;
(4)选通成像时,探测器的曝光时间较短(通常为十几到几十纳秒),可有效消除大气湍流和平台震动对成像质量造成的影响,且战场上由于主动照明成像所引起的自身曝露概率降低。
四、基于激光距离选通成像的应用
目前,恐怖活动已成为危害人身安全、破坏社会稳定的重要因素, 城市巷战已成为军事行动的主要模式之一。因此,世界各国都将发展新型反恐技术和武器装备摆在重要位置。
1. 2009 年日本京都国际会议上,美国MIT Media Lab 作了采用飞秒瞬态成像技术实现拐角非视域成像的报告,提出了非视域成像技术在火灾现场救援、交通盲区成像探测以及内脏内窥死角成像检测等方面的应用设想(见图 9)。
(a)搜救定位;(b)交通盲区成像探测
(c)内脏内窥死角成像探测
图9 MIT提出的飞秒非视域成像技术的应用设想
城市巷战、恐怖活动和治安事件通常发生在城镇街道环境或建筑物内(如民房、学校教室、轮船舱室、高楼的地下停车库等),由于墙壁或街道拐角等遮挡形成视觉盲区,而采用传统的成像技术和设备均难以实现对视觉盲区内场景势态的观察。因此,迫切需要发展能够绕过拐角或障碍物的遮挡对目标物进行成像的光电技术和装备。基于激光距离选通的非视域成像具有良好的潜在应用。
3. 鉴于热成像技术具有很高的战场目标搜索和探测特性,近年来将其与激光距离选通成像技术组合应用(即通过热成像系统获取目标及其方位信息,由激光距离选通成像系统瞬间获取目标细节,进而识别目标)成为一种令人关注的目标探测和识别模式。将激光距离选通成像系统与热成像系统(或激光测距机)等集成到同一平台上的组合应用模式,可使主/被动系统各自的优势互补,有效提升夜视装备的作战效能,已成为国内外关注的发展趋势之一。
五、激光距离选通成像的关键技术
5.1激光器
激光主动成像系统对激光光源的要求:(1)较高的峰值功率;(2)较窄的脉冲宽度;(3)大气传输性能好。
通常采用脉冲NdB-YAG激光器,工作波长为1.06 mm,经倍频后为0.532 mm,发射和接收光学系统均容易设计,探测也较容易,缺点是穿透战场烟尘的能力较差。1.54 mm波长的激光对人眼更安全,穿透战场烟雾的性能优于1.06 mm。1.54 mm波长激光由于具有对人眼最安全,大气穿透能力强,目标反射系数高等优点,因而采用1.54 mm波长激光器作为照明光源是今后主动成像系统的一个重要发展趋势。输出波长1.54mm的对人眼安全固体激光器主要有两种,即铒玻璃激光器和喇曼频移NdB-YAG激光器。脉冲二极管泵浦NdB-YAG激光器转换效率可达6%,几乎是闪光灯泵浦NdB-YAG激光器的2倍,目前主要缺点是成本较高。二极管激光器用于激光成像系统的光源比较合适,结构紧凑,转换效率可达30%,但是目前市场上还没有窄脉冲、高亮度的二极管激光器。为了有足够的能量,通常也采用激光二极管阵列。激光二极管阵列具有效率高、寿命长、光束发散角大等优点,适合于近距离大视场成像探测。另一种有前途的是TEA-CO2激光器,发射10.6mm波长的激光,对人眼安全,大气穿透性能好,但是光学系统复杂,所以目前还不如NdB-YAG激光器用得广泛。
5.2 接收器
要求具有外触发和选通功能、高空间分辨率和高量子效率,低噪声,大孔径,有足够的增益动态范围。GaAsP光电阴极管工作波长为532 nm,量子效率接近50%。可选通的CCD耦合光电二极管信噪比达到10 dB以上,第3代管子的选通能力优于10 ns。使用CCD摄像机作为探测器,由于快门速度的限制,不能实现选通成像,在微光条件下不能提供高分辨率图像,对激光功率要求高。通过光纤与微通道板式选通图像增强器相连的CCD摄像机(即ICCD),其灵敏度高,降低了对激光脉冲功率的要求,低光照条件下,性能优于CCD,微通道板式选通图像增强器既可以增加光探测器的增益,又起到快门的作用。
5.3 距离选通同步控制技术
距离选通同步控制技术是距离选通激光成像系统的核心技术,直接关系到能否得到目标的选通图像。对于纳秒级脉冲激光,如果想获得照明目标的选通图像,首先需要解决激光器和摄像机的同步问题。一般CCD帧扫描周期约为几十毫秒,而激光脉冲为纳秒级,再加上光脉冲到达CCD的随机性,导致激光脉冲可能有一部分落入CCD积分时间区,探测不到目标反射回来的激光信号;由于积分时间为几十毫秒,即使探测到激光回波信号也包含大部分后向散射光,不能起到选通的作用。必须缩短CCD的积分时间,自然想到采用带电子快门的CCD,但目前最快的电子快门速度为1/80000s(12.5ms),与纳秒级激光脉冲相比,不能满足选通要求。采用在CCD摄像机前加装选通像增强器,像增强器能够在很短的时间内(通常为5ns)打开或关闭,可以实现纳秒级选通。由于选通减小了CCD的积分时间,相应降低了CCD摄像机的有效灵敏度,像增强器的高增益可以补偿入射光的减弱而引起的灵敏度降低。选通像增强器既可以增加光探测器的增益,又起到快门的作用。CCD摄像机通过光纤与微通道板式图像增强器相连,就构成了ICCD摄像机。采用ICCD摄像机和激光器构成的激光距离选通成像系统可以很方便地实现选通。
距离选通同步控制技术主要是使激光器和ICCD摄像机同步,并且提供选通门宽度、脉冲宽度和延迟时间选择。同步控制电路主要由使快门开启与激光照射同步的定时电路组成,定时时间取决于激光脉冲传输到目标上再反射到接收器所需要的时间。图2中给出了对1220m处目标进行观察时理想距离选通成像的时序关系图。
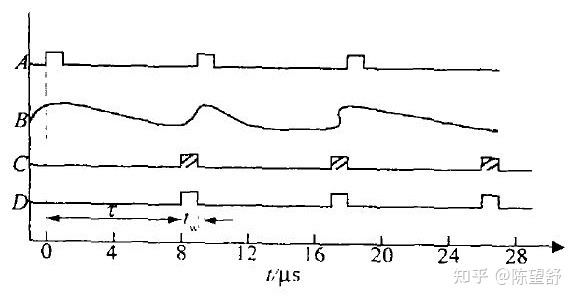
图10 l = 1220m理想选通时序图
由于激光脉冲在1220m上来回渡越时间是8mm,所以选通脉冲应在照明脉冲前沿后延迟8mm。图中,波形A为激光脉冲照明输出;波形B为接收器接收到的脉冲激光投向目标的过程中产生的后向散射;波形C为激光脉冲由目标返回到接收器上的反射辐射;波形D为接收器的选通脉冲;t为延迟脉冲发生器的延迟时间;tw为接收器的选通脉冲宽度;l为激光器到目标的距离。以上所提到的是假定激光器、延迟脉冲发生器和像增强器驱动电路为零传输时间延迟的理想选通情况,但是在实际的应用中,必须考虑以上传输时间延迟。采用图11所示的同步控制方案必须考虑激光器、延迟脉冲发生器和像增强器驱动电路的传输时间延迟。通常延迟脉冲发生器和像增强器驱动电路的传输时间延迟容易精确测量得到,但是激光器的传输时间延迟一般为几十毫秒,不容易精确测量,而且受到激光器内部的工作物质、工作温度等多种因素的影响。为了克服激光器的传输时间延迟,提出了一种新的距离选通同步控制方案,图3中给出了采用该方案设计的距离选通成像系统。
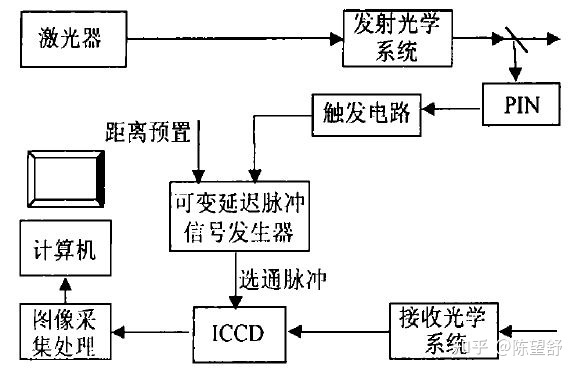
图11 距离选通成像系统框图
激光器发射短激光脉冲,经分光后,一小部分光被PIN管接收,经触发电路为延迟脉冲信号发生器提供定时基准脉冲,通过延迟脉冲信号发生器选通ICCD摄像机。该方案不须考虑激光器的时间延迟,只需考虑PIN管和触发电路、延迟脉冲信号发生器以及像增强器驱动电路的传输时间延迟,以上传输时间延迟均容易测得。
5.4 同步扫描技术
同步扫描技术是把激光器与接收机设置在两个间距一定距离的地方,使照明光束扫描线与接收机在被观察区域相交成一个角度,这样使后向散射光尽可能少地进入接收器中,这种方法能有效地增大探测距离。
最后
以上就是多情魔镜最近收集整理的关于激光距离选通成像的全部内容,更多相关激光距离选通成像内容请搜索靠谱客的其他文章。








发表评论 取消回复