项目场景:
在装有ROS平台的移动机器人上使用图漾相机,按照官网教程配置相机,最终成功运行输出图像,以下记录所遇到的问题。
- 相机型号:FM830-5M
- 系统:Ubuntu 16.04
- ROS:kinetic
问题以及解决方案
问题1:
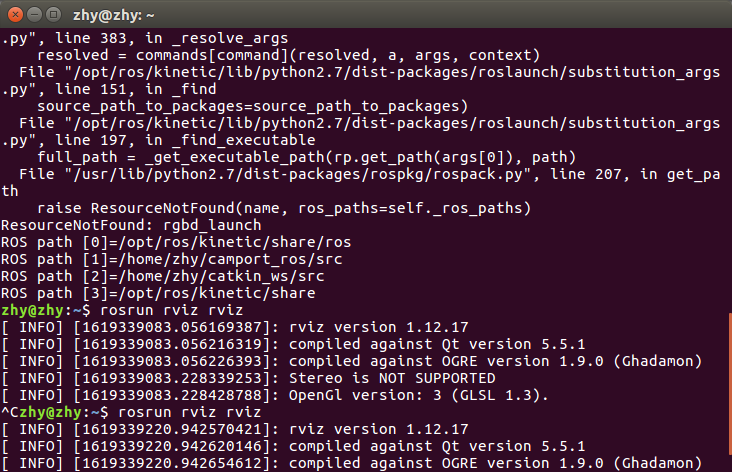
在执行命令 roslaunch openni2_launch openni2.launch 后报错如下:
ResourceNotFound(name, ros_paths=self._ros_paths)
ResourceNotFound: rgbd_launch
解决方案:
执行以下命令可解决问题。
$ sudo apt-get install ros-kinetic-rgbd-launch
问题2:
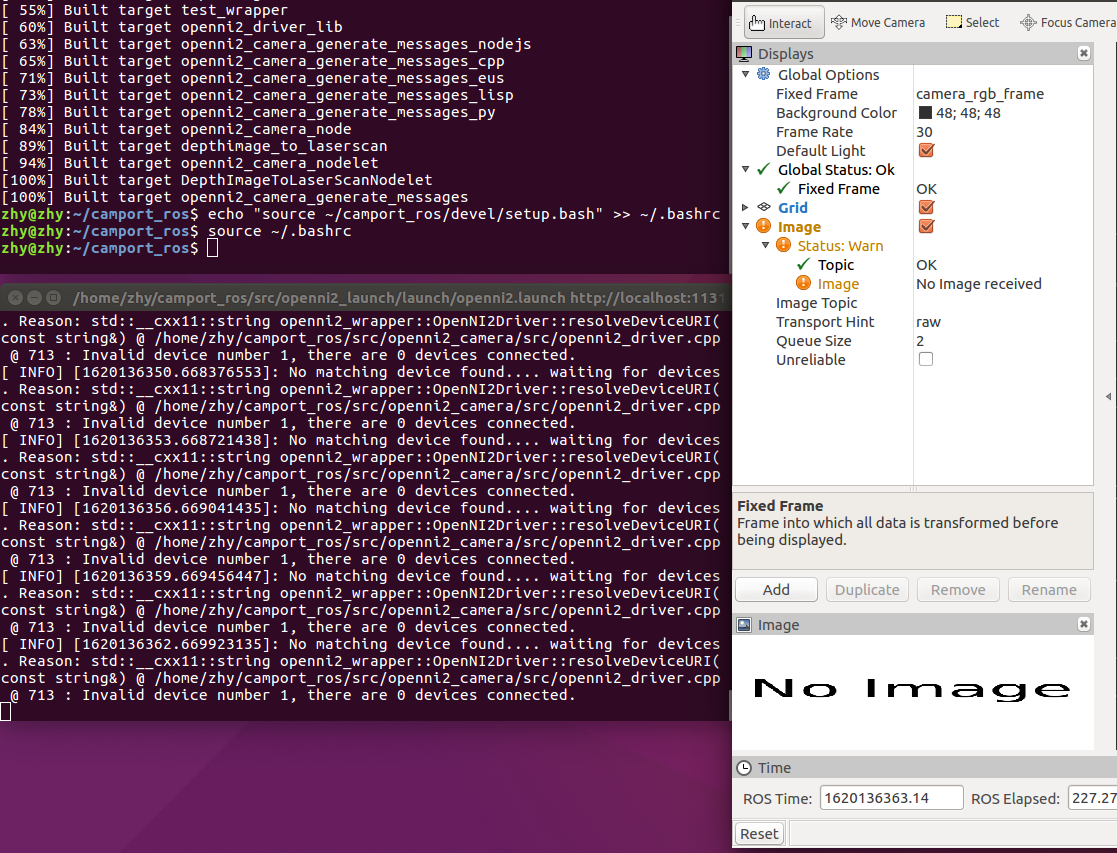
可以连接相机,运行simpleview_FetchFrame的示例程序并输出图像,但是在ROS中运行launch文件后,显示设备无效,没有连接。但用lsusb命令可以看到相机设备已连.
报错如下:
[ INFO] [1620136419.679987245]: No matching device found… waiting for devices. Reason: std::__cxx11::string openni2_wrapper::OpenNI2Driver::resolveDeviceURI(const string&) @ /home/zhy/camport_ros/src/openni2_camera/src/openni2_driver.cpp @ 713 : Invalid device number 1, there are 0 devices connected.
原因分析:
相机受到磕碰或撞击都会产生上述问题.在使用过程中,有一次相机不小心没拿稳,掉在了桌子上,也就10cm左右的高度,就连接不上了.所以在使用过程中切记轻拿轻放.
解决方案:
1.修改usb的用户权限规则(未尝试)
2.将openni x64的两个deb包重新安装,在终端输入以下命令。
$ cd /camport3_openni2/binary
$ sudo dpkg -i libopenni2-0_2.2.0.33+dfsg-4_amd64.deb
$ sudo dpkg -i libopenni2-dev_2.2.0.33+dfsg-4_amd64.deb
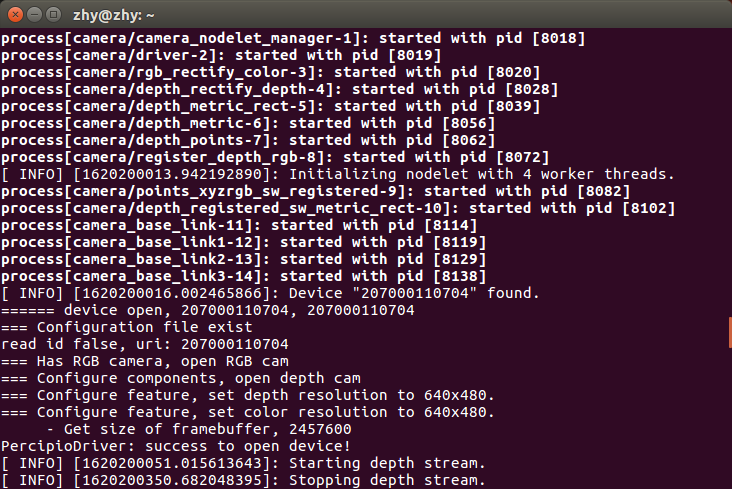
分别在三个终端执行如下命令,相机成功连接,实现在 RVIZ 中查看深度图像
$roscore
$roslaunch openni2_launch openni2.launch
$rosrun rviz rviz
3.其他解决方案,可以参考以下内容
- https://blog.csdn.net/sunyoop/article/details/78594871
- https://answers.ros.org/question/318198/openni2-is-no-matching-device-found-with-kinect-onev2/
- https://answers.ros.org/question/97081/kinect-not-detected/
最后
以上就是健康铃铛最近收集整理的关于图漾相机使用过程所遇到的问题项目场景:问题以及解决方案的全部内容,更多相关图漾相机使用过程所遇到内容请搜索靠谱客的其他文章。








发表评论 取消回复