在上一篇文章中,我们已经介绍了,这篇文章将会对目标的角度进行估计。
简单回顾一下前面的文章,对接收得到的差频信号分别在快时间维,慢时间维进行FFT处理,可以获得目标的距离和速度信息,关于目标的角度信息,该如何理解?
目标的角度信息不同于距离和速度的估计,而位于另外一个维度,空域。
通过下面的这个图,我们将理解FMCW雷达究竟是如何从空域获得目标的角度信息。图中给出了一个一维的ULA线性接收阵,可以看到这个阵列有2个接收天线。
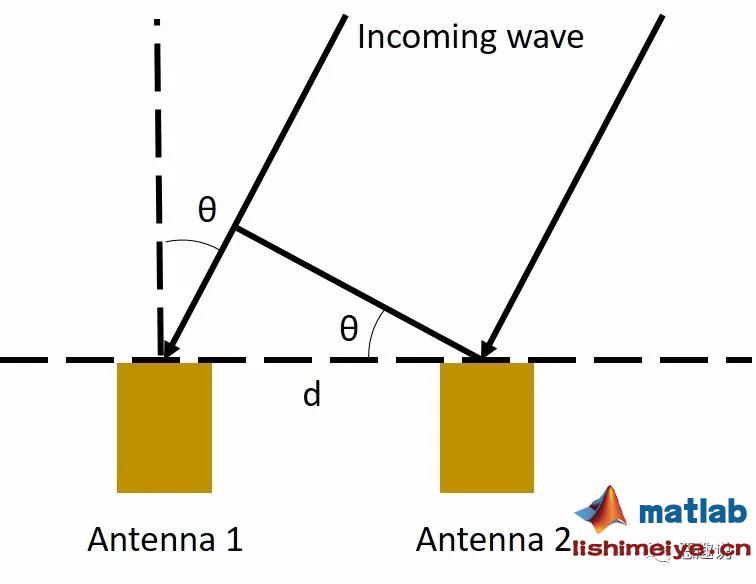
这两个接收天线对于目标之间存在着一个下相位差,可以表示为
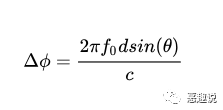
可以发现,通过上述公式中的相位差我们可以得到目标的角度信息。
在理解了目标的角度信息后,下面从数学的角度对原来的快时间维和慢时间维进行扩展,接收得到差频信号在快时间维和慢时间维可以写为

考虑到空域的角度信息,可以将快慢时间维度的接收差频信号扩展到快慢时间外加空域的三个维度,也就是说,扩展后的接收差频信号此时已经包含了目标的距离,速度和角度信息。扩展后的接收差频信号可以写为

其中k表示接收天线的个数,d为天线间距。
既然构造的接收差频信号中已经包含了目标一般意义上的状态观测量,距离,速度和角度。关于距离和速度的求取在上一篇文章中已经做了介绍,现在还有一个问题,扩展后的角度信息该如何求取呢?
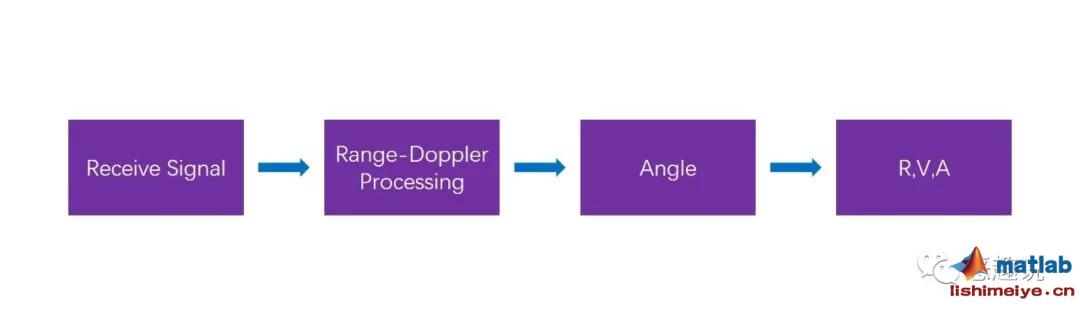
上面的图中给出了一个简单的FMCW雷达处理流程,接收差频信号在经过Range-Doppler处理后,由于不同接收天线之间存在相位差,利用这一关系即可反求出目标信号的角度信息。
最后,我们将展示如何利用MATLAB来通过仿真获得目标的角度信息。在例程中设置了一个角度为15°的目标,距离和速度分别为50和3。下面的图中给出了此时的接收差频信号在经过Range-Doppler的处理后的结果。
根据RDM计算得到目标的距离和速度分别为
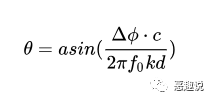
这里例子中我构造生成了两个接收天线的接收数据,利用不同天线之间存在的相位差,反求出目标的角度为
tarAngle = asin((Target_phase_diff) / (((2*pi)/(c/f0))*d)) * 180/pi ;
至此,通过利用MATLAB我们已经可以获得FMCW雷达关于目标的距离,速度和角度信息。
喜欢就转发一个呗~
题图:Pexels,from Pixabay.
最后
以上就是单身小蝴蝶最近收集整理的关于fmcw matlab仿真,干货 | 利用MATLAB实现FMCW雷达的角度估计的全部内容,更多相关fmcw内容请搜索靠谱客的其他文章。






![[参]FMCW的MATLAB仿真](https://www.shuijiaxian.com/files_image/reation/bcimg25.png)

发表评论 取消回复