前言
-
今天我们来评测linux内核的高精度定时器。顺便利用通过Tektronix示波器 和 DS100 Mini 数字示波器进行交叉测试。
-
因项目需要用到精准的时间周期,所以要评估它的可行性,并验证正点原子的示波器能不能支撑嵌入式开发流程。
Linux高精度定时器说明
-
其实传统的低分辨率定时器随着技术的演进,已经无法满足开发需求。而且硬件的不断发展,硬件定时器的精度也越来越高,这也给高精度定时器创建了有利条件。
-
低分辨率的定时大部分时间复杂度可以实现O(1),当有进位发生时,不可预测的O(N)定时器级联迁移时间,影响定时器的精度。
-
低分率的定时器可以说在超时应用场景上更加合适,以超时为目的,期望在超时到来之前获得正确的结果的场景,应用低分辨率的定时器适合不过。
-
为了满足技术的演进及定时器的精度要求,Linux内核为高精度定时器重新设计了一套软件架构,它可以为我们提供纳秒级的定时器精度,以满足我们开发需求。精度如何实测才知道。。。。
Linux高精度定时器驱动编写
-
为了验证高精度定时器的分辨率,我们写一个简单的内核驱动(功能:在设定的周期内反转IO,然后通过示波器测量精度)。
-
高精度定时器使用步骤:
-
初始化定时器工作模式:hrtimer_init(&kthread_timer, CLOCK_MONOTONIC, HRTIMER_MODE_REL);
-
设置定时器的回调函数:kthread_timer.function = hrtimer_cb_func;
-
启动定时器:hrtimer_start(&kthread_timer, ktime_set(HRTIMER_TEST_CYCLE), HRTIMER_MODE_REL);
-
在定时器回调函数中,增加定时到期时间:hrtimer_forward(timer, timer->base->get_time(), ktime_set(HRTIMER_TEST_CYCLE));
-
内核驱动模块代码模块实现:
#include "hrtimer_test.h"
#define HRTIMER_TEST_PIN 7
#define HRTIMER_TEST_CYCLE 0, (100000 / 2)
#define DEVICE_NAME "HRTIMER_TEST"
#define CLASS_NAME "HRTIMER_TEST"
int major_number;
struct device *device;
struct class *class;
static struct hrtimer kthread_timer;
int value = 0;
enum hrtimer_restart hrtimer_cb_func(struct hrtimer *timer) {
ChipBspGpio_ExportSet(ULTRASONIC_TEST_PIN, value);
value = !value;
hrtimer_forward(timer, timer->base->get_time(), ktime_set(HRTIMER_TEST_CYCLE));
return HRTIMER_RESTART;
}
void kthread_hrtimer_init(void) {
hrtimer_init(&kthread_timer, CLOCK_MONOTONIC, HRTIMER_MODE_REL);
kthread_timer.function = hrtimer_cb_func;
hrtimer_start(&kthread_timer, ktime_set(HRTIMER_TEST_CYCLE), HRTIMER_MODE_REL);
}
static int __init hrtimer_test_init(void) {
printk(KERN_ALERT "hrtimer_test : Init !!n");
major_number = register_chrdev(0, DEVICE_NAME, NULL);
if (major_number < 0) {
printk(KERN_ALERT "hrtimer_test: Register fail!n");
return major_number;
}
printk(KERN_ALERT "Registe success, major number is %dn", major_number);
class = class_create(THIS_MODULE, CLASS_NAME);
if (IS_ERR(class)) {
unregister_chrdev(major_number, DEVICE_NAME);
return PTR_ERR(class);
}
device = device_create(class, NULL, MKDEV(major_number, 0), NULL, DEVICE_NAME);
if (IS_ERR(device)) {
class_destroy(class);
unregister_chrdev(major_number, DEVICE_NAME);
return PTR_ERR(device);
}
printk(KERN_ALERT "hrtimer_test: init success!!n");
kthread_hrtimer_init();
return 0;
}
static void __exit hrtimer_test_exit(void) {
hrtimer_cancel(&kthread_timer);
device_destroy(class, MKDEV(major_number, 0));
class_unregister(class);
class_destroy(class);
unregister_chrdev(major_number, DEVICE_NAME);
printk(KERN_ALERT "hrtimer_test: exit success!!n");
}
module_init(hrtimer_test_init);
module_exit(hrtimer_test_exit);
MODULE_AUTHOR("RieChen");
MODULE_LICENSE("GPL");-
该驱动模块主要功能:在定时器回调函数中,周期性反转GPIO,然后查看其定时器精度。其中宏定义(HRTIMER_TEST_CYCLE)为定时的周期。
Linux高精度定时器的评测
-
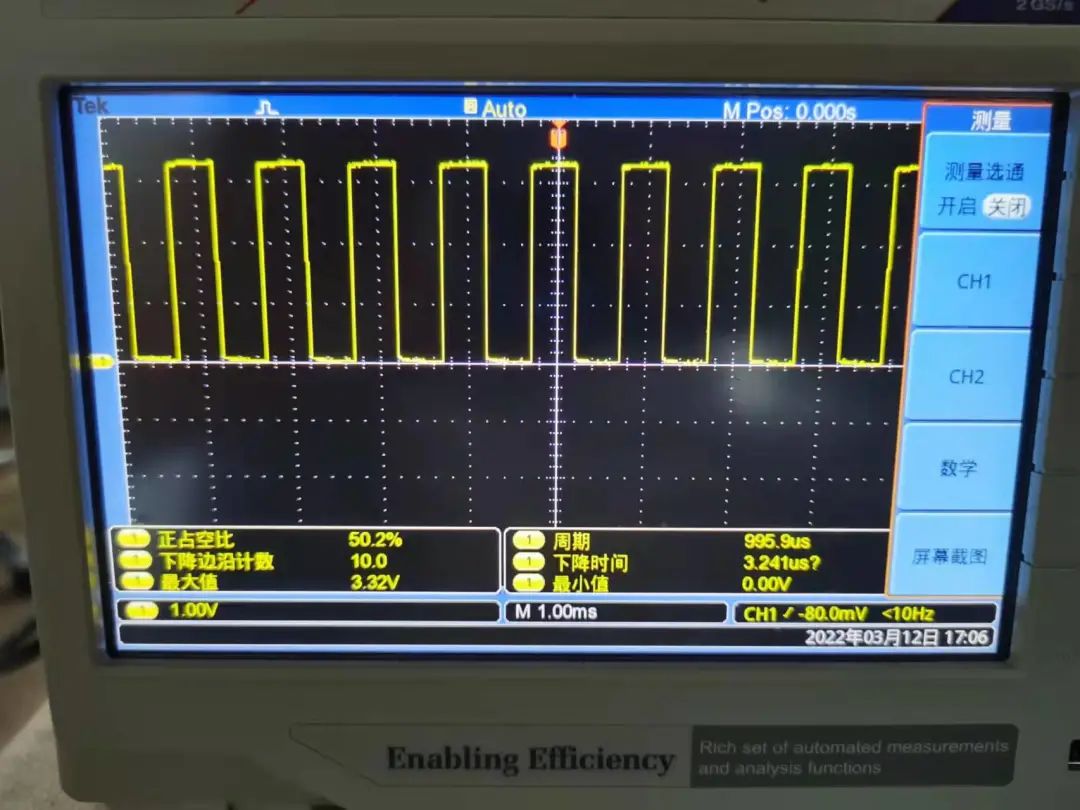
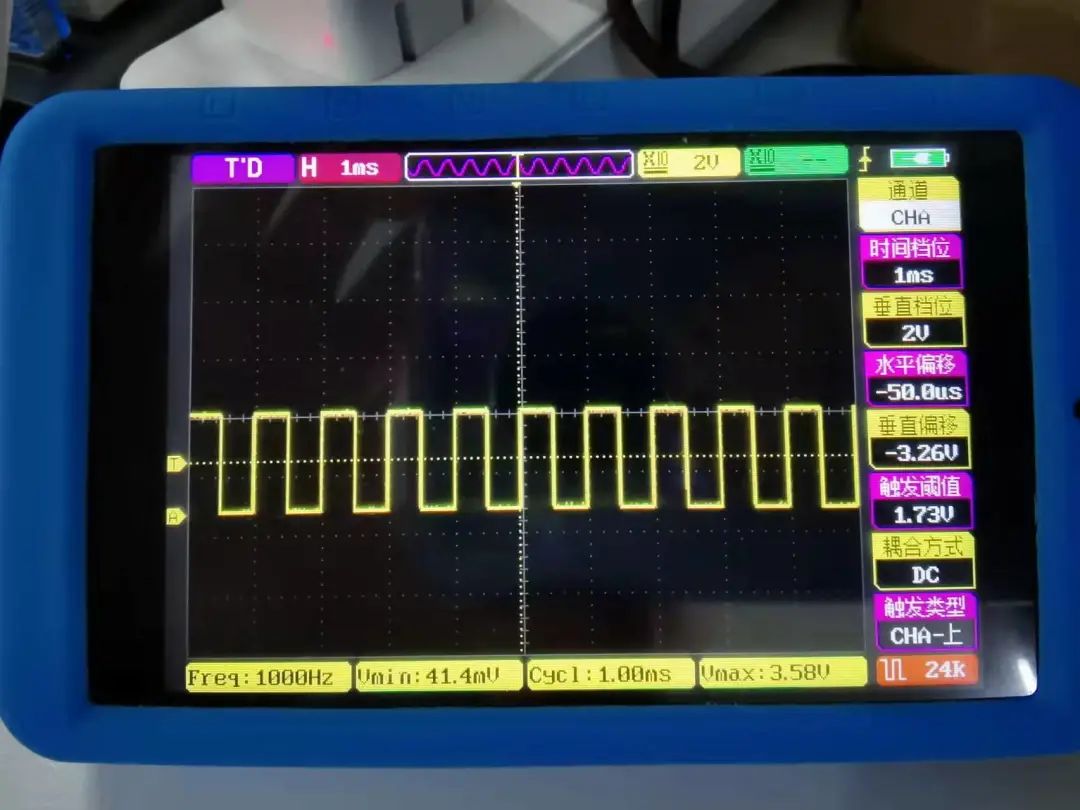
周期1ms评测:
-
修改宏定义:HRTIMER_TEST_CYCL设置周期为1ms. 修改如下
#define HRTIMER_TEST_CYCLE 0, (1000000 / 2)-
通过Tektronix示波器测量:
-
通过DS100 Mini 数字示波器测量:
-
结论:Tektronix示波器和DS100 Mini 数字示波器数据相符,波形稳定。统计出的频率与周期跟软件设置一致
-
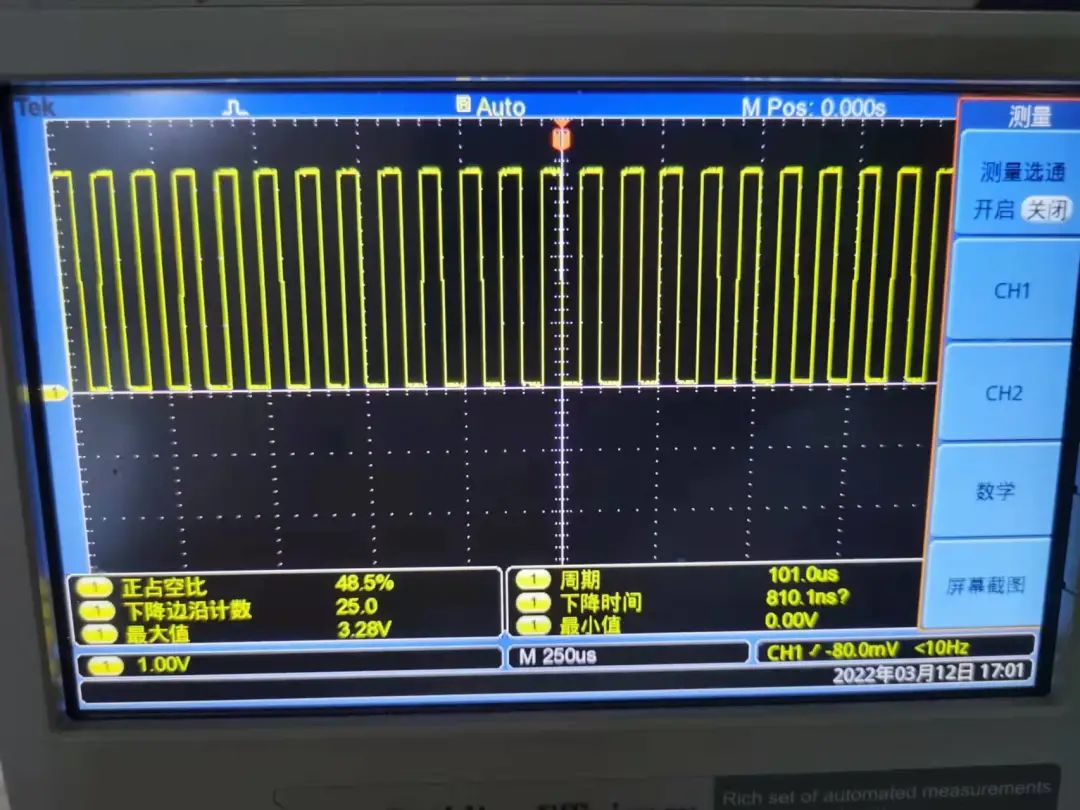
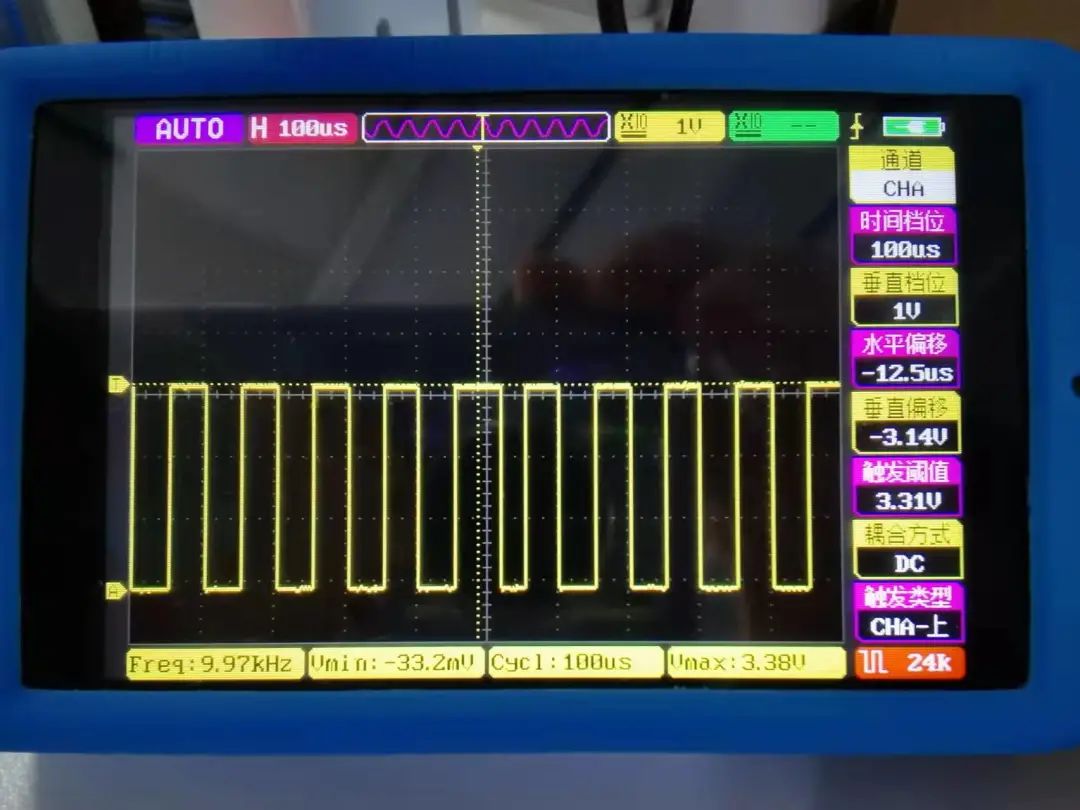
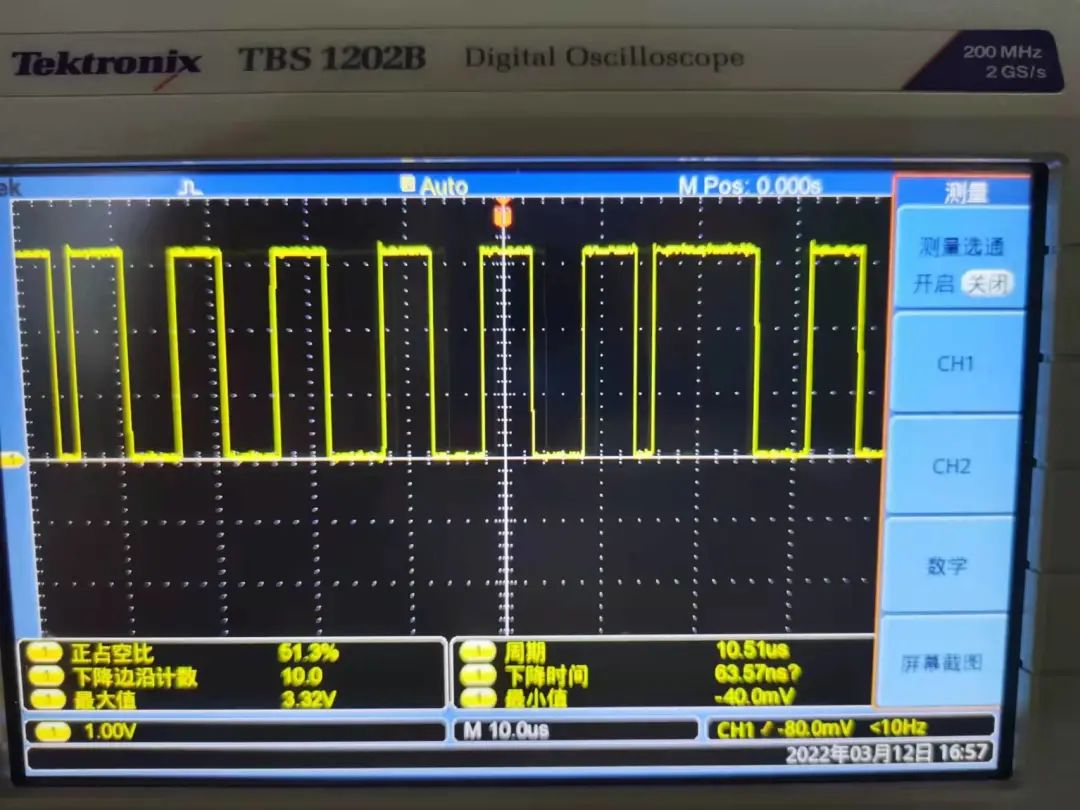
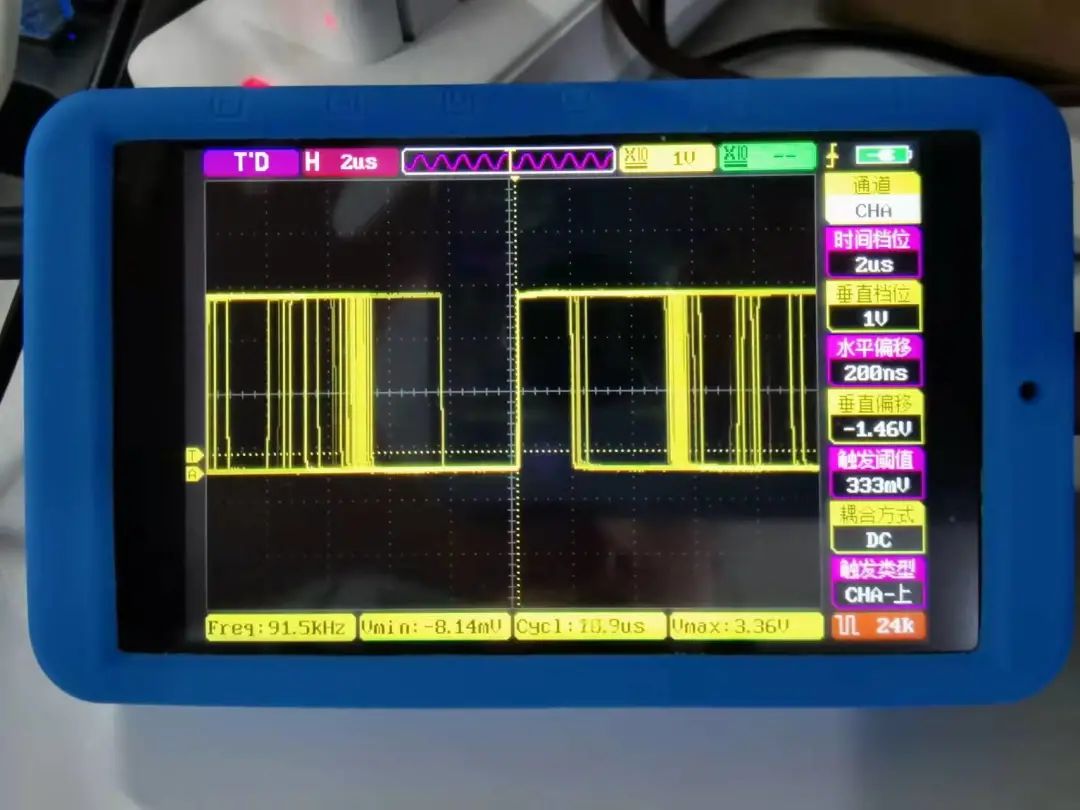
周期100us评测:
-
修改宏定义:HRTIMER_TEST_CYCL设置周期为100us. 修改如下
#define HRTIMER_TEST_CYCLE 0, (100000 / 2)-
通过Tektronix示波器测量:
-
通过DS100 Mini 数字示波器测量:
-
结论:Tektronix示波器和DS100 Mini 数字示波器数据相符,波形稳定。统计出的频率与周期跟软件设置一致
-
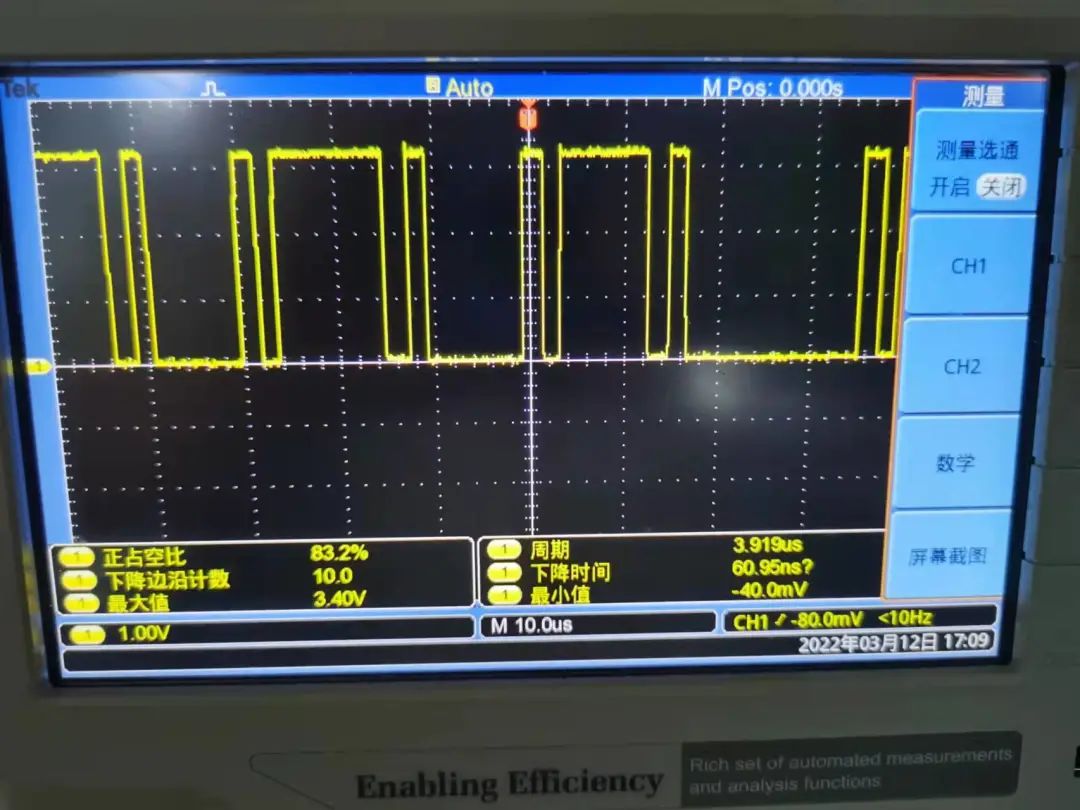
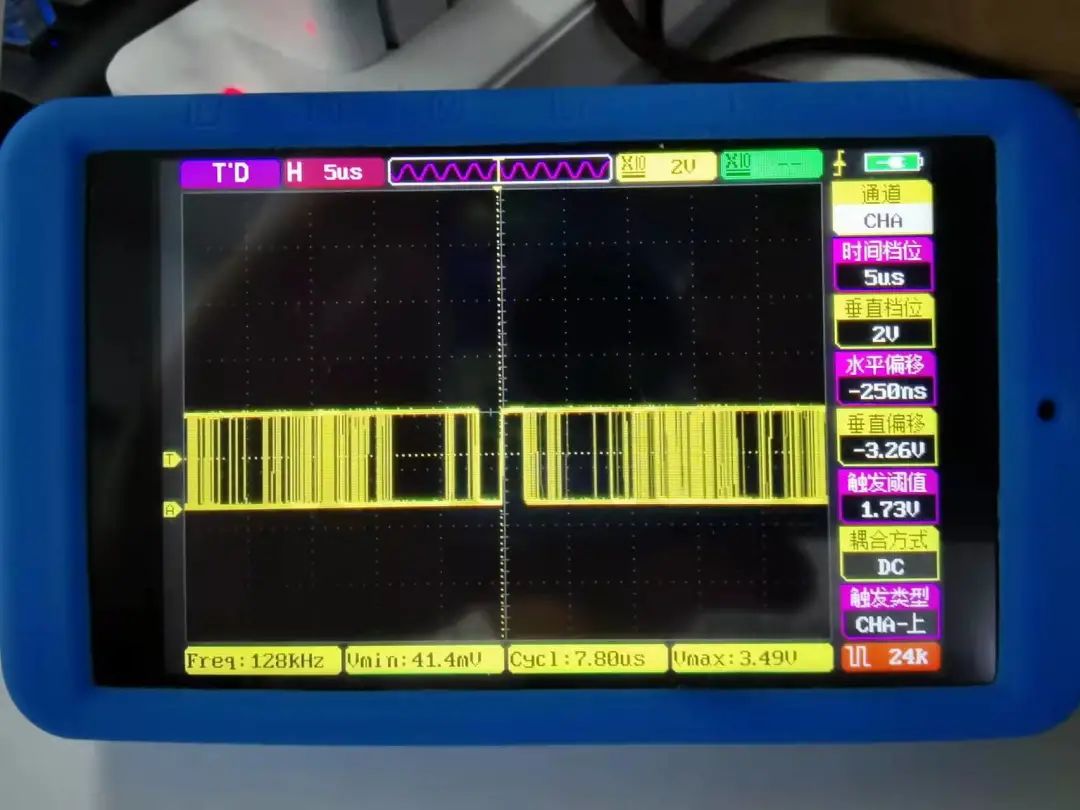
周期10us评测:
-
修改宏定义:HRTIMER_TEST_CYCL设置周期为10us. 修改如下
#define HRTIMER_TEST_CYCLE 0, (10000 / 2)-
通过Tektronix示波器测量:
-
通过DS100 Mini 数字示波器测量:
-
结论:Tektronix示波器和DS100 Mini 数字示波器数据都无法精确测量,波形不清晰。
-
周期1us评测:
-
修改宏定义:HRTIMER_TEST_CYCL设置周期为1us. 修改如下:
#define HRTIMER_TEST_CYCLE 0, (1000 / 2)-
通过Tektronix示波器测量:
-
通过DS100 Mini 数字示波器测量:
-
结论:Tektronix示波器和DS100 Mini 数字示波器数据都无法精确测量,波形不清晰。
总结
-
高精度定时器总结
-
Linux提供的高精度定时器可以满足我们大部分需求的,要注意的的,定时器回调函数不能做太多任务,并需要快速执行,否则无法保证其周期性。(作者认为高精度定时器可以看作一个外部中断的思想进行处理)
-
通过此次评估,Linux提供的高精度定时器可以满足我的项目需求,而且建议几十纳秒级的需求使用比较合适,如果几纳秒的需求不适合。
-
示波器总结
-
通过评估数据上看,DS100 Mini 数字示波器可以替代一般的台式示波器。
-
DS100 Mini 数字示波器可以在大部分场景上使用,可以满足项目需求
关注微信公众号『Rice嵌入式开发技术分享』,后台回复“微信”添加作者微信,备注”入群“,便可邀请进入技术交流群。

最后
以上就是现实自行车最近收集整理的关于Linux驱动开发高精度定时器的精度测量的全部内容,更多相关Linux驱动开发高精度定时器内容请搜索靠谱客的其他文章。








发表评论 取消回复