1 简介
目前在许多食品,机械加工等行业的自动化生产线上普遍存在抓取和分拣等大量的重复性工作,为了降低劳动成本,提高生产效率,实现高效益,提高生产的安全可靠性,推动并联机械手的发展非常有必要.
2 部分代码
function [D] = PRR3_InversePosKin(P11,P12,P13,Pe,b,a,d3)% Function to return the joint variables of the 3PRR manipulator for% given end effector pose and manipulator geometrysgn1 = -1;sgn2 = 1;sgn3 = 1;x31 = Pe(1)+a(2,1)*cos(Pe(3)+d3(1));x32 = Pe(1)+a(2,2)*cos(Pe(3)+d3(2));x33 = Pe(1)+a(2,3)*cos(Pe(3)+d3(3));y31 = Pe(2)+a(2,1)*sin(Pe(3)+d3(1));y32 = Pe(2)+a(2,2)*sin(Pe(3)+d3(2));y33 = Pe(2)+a(2,3)*sin(Pe(3)+d3(3));A1 = y31-P11(2)-(x31-P11(1))*tan(b(1))+a(1,1)*tan(b(1));B1 = 2*a(1,1);C1 = y31-P11(2)-(x31-P11(1))*tan(b(1))-a(1,1)*tan(b(1));A2 = y32-P12(2)-(x32-P12(1))*tan(b(2))+a(1,2)*tan(b(2));B2 = 2*a(1,2);C2 = y32-P12(2)-(x32-P12(1))*tan(b(2))-a(1,2)*tan(b(2));A3 = y33-P13(2)-(x33-P13(1))*tan(b(3))+a(1,3)*tan(b(3));B3 = 2*a(1,3);C3 = y33-P13(2)-(x33-P13(1))*tan(b(3))-a(1,3)*tan(b(3));if((isreal(sqrt(B1^2-4*A1*C1)))&(isreal(sqrt(B2^2-4*A2*C2)))&(isreal(sqrt(B3^2-4*A3*C3))))t21b = 2*atan2((-B1+sgn1*sqrt(B1^2-4*A1*C1)),(2*A1));t11 = t21b-pi;d1 = sqrt((x31+a(1,1)*cos(t21b)-P11(1))^2+ (y31+a(1,1)*sin(t21b)-P11(2))^2);t22b = 2*atan2((-B2+sgn2*sqrt(B2^2-4*A2*C2)),(2*A2));t12 = t22b-pi;d2 = sqrt((x32+a(1,2)*cos(t22b)-P12(1))^2+ (y32+a(1,2)*sin(t22b)-P12(2))^2);t23b = 2*atan2((-B3+sgn3*sqrt(B3^2-4*A3*C3)),(2*A3));t13 = t23b-pi;d3 = sqrt((x33+a(1,3)*cos(t23b)-P13(1))^2+ (y33+a(1,3)*sin(t23b)-P13(2))^2);D = [d1 d2 d3 t11 t12 t13];elseD = [];end
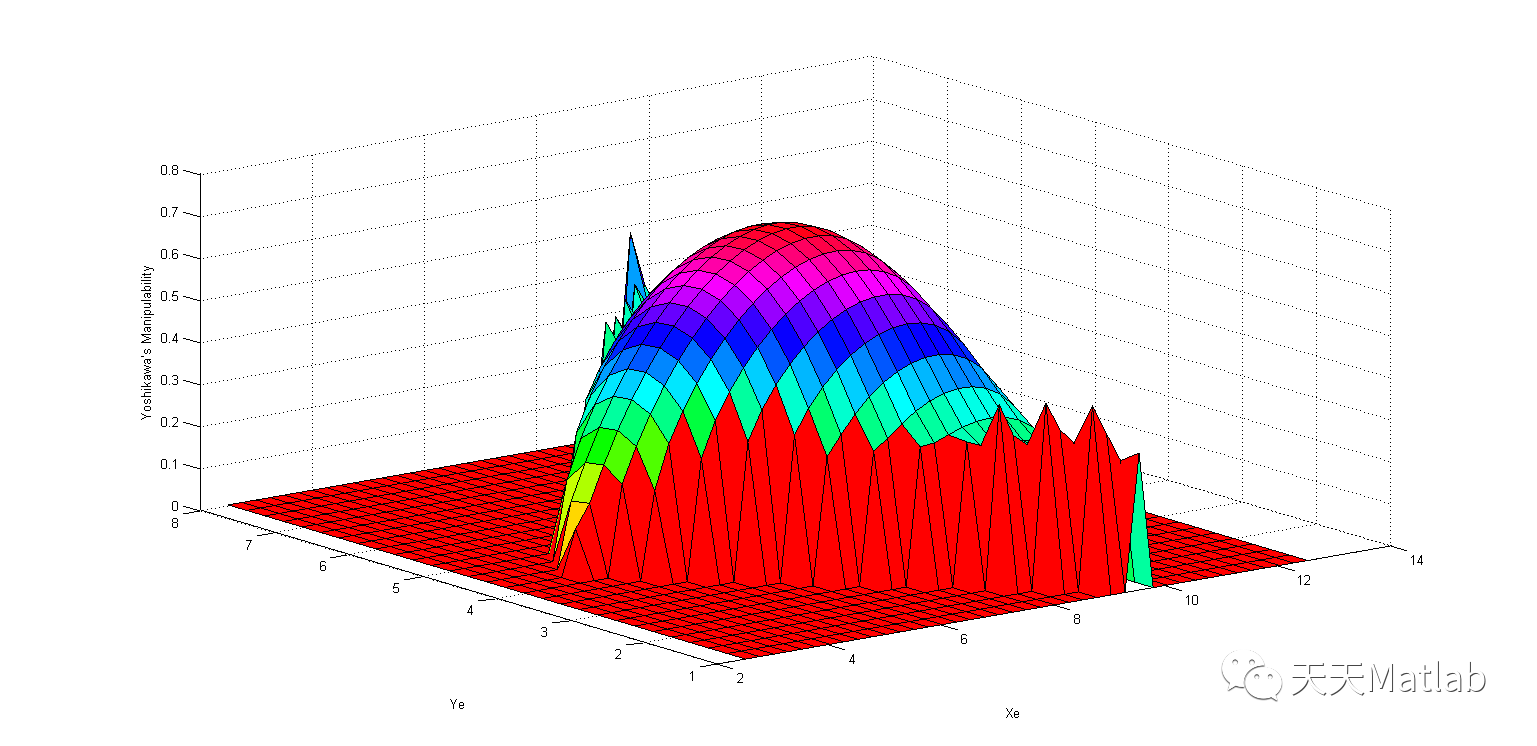
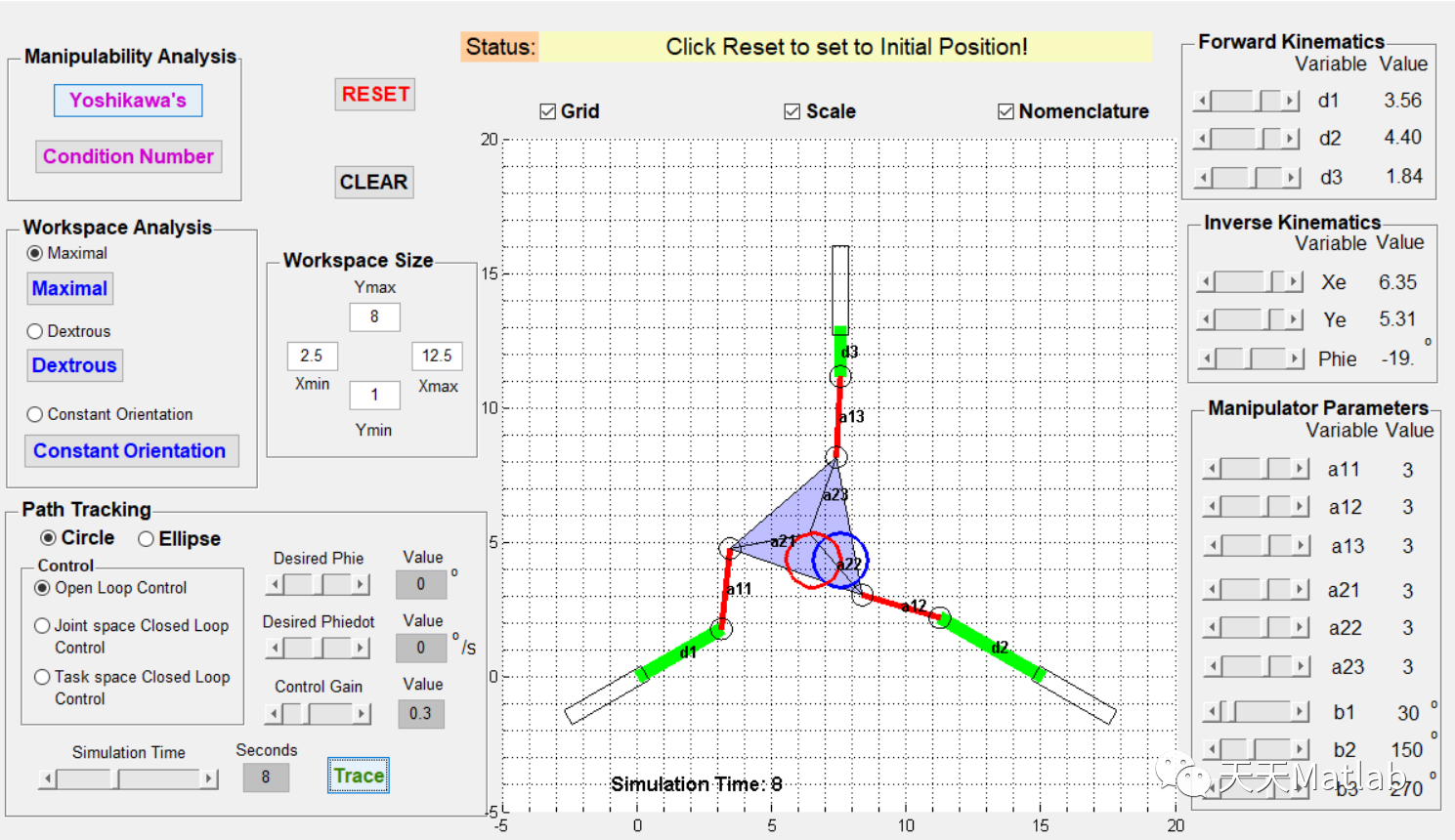
3 仿真结果
4 参考文献
[1]黄俊华, 田壮. 基于MATLAB的四杆并联机械臂工作空间仿真与分析[J]. 山东工业技术, 2019(20).
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。
最后
以上就是秀丽黄蜂最近收集整理的关于【机械臂】matlab模拟平面并联机械臂附GUI的全部内容,更多相关【机械臂】matlab模拟平面并联机械臂附GUI内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复