s型加减速:
在网格图上,速度的变化现是缓慢增大,然后快速增大,再是缓慢增大,再到匀速。也就是说加速度是变化的。
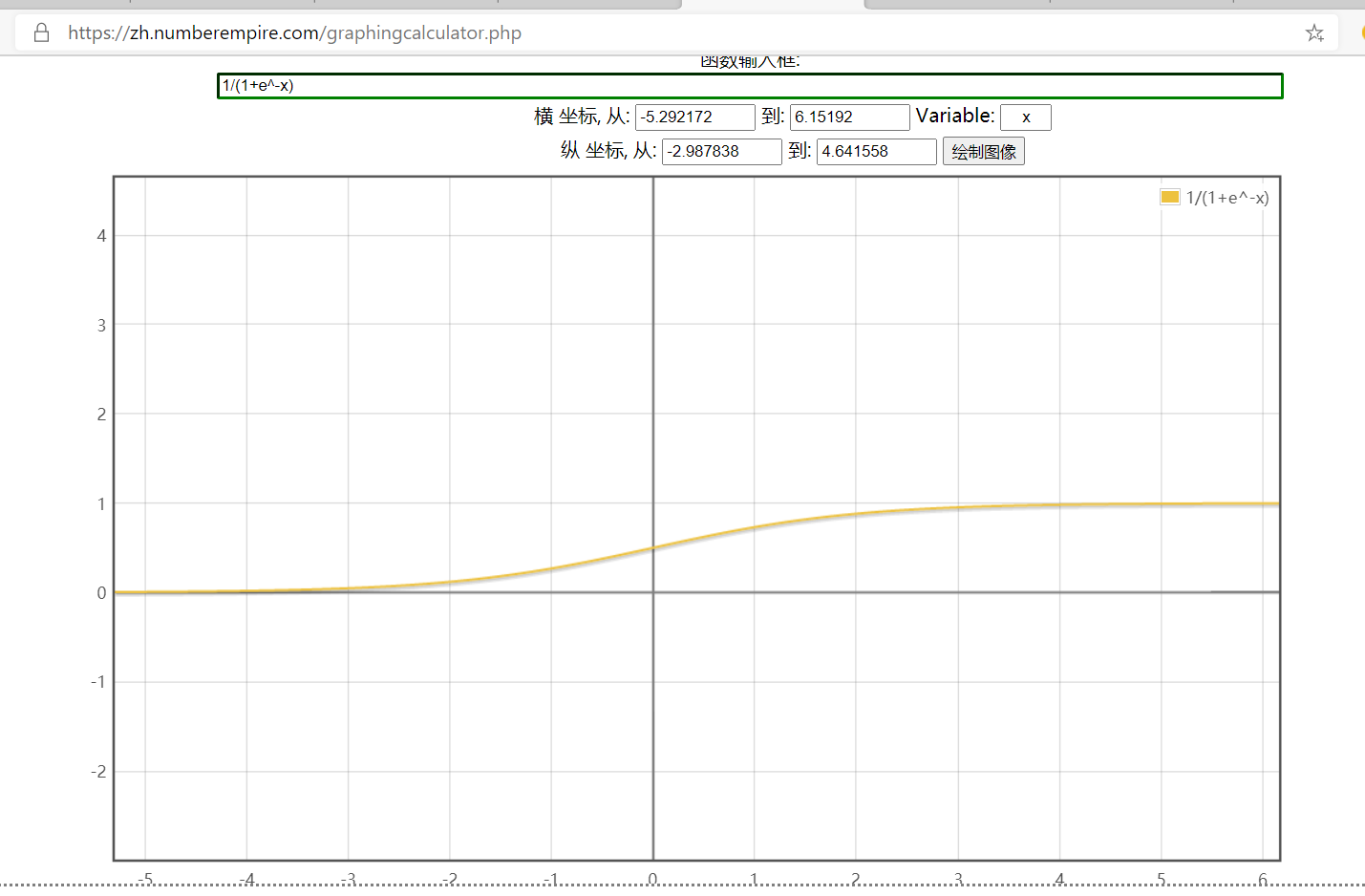
f(x) = 1/(1+e^-x),这是y从左到右增加时的S曲线的原始函数,用这个生成一个表,加速正着用,减速倒着用,e是自然常数,约为2.71828。当-3 ≤ x ≤ 3,函数收敛较为明显,此时,y轴高度基本处于0到1之间,更精确点,当x = -3时, y ≈ 0.04742,当x = 3时,y ≈ 0.95257。如果精度不够,就加大x的取值范围。现在假设3 ≤ x ≤ 3时,y从0到1。
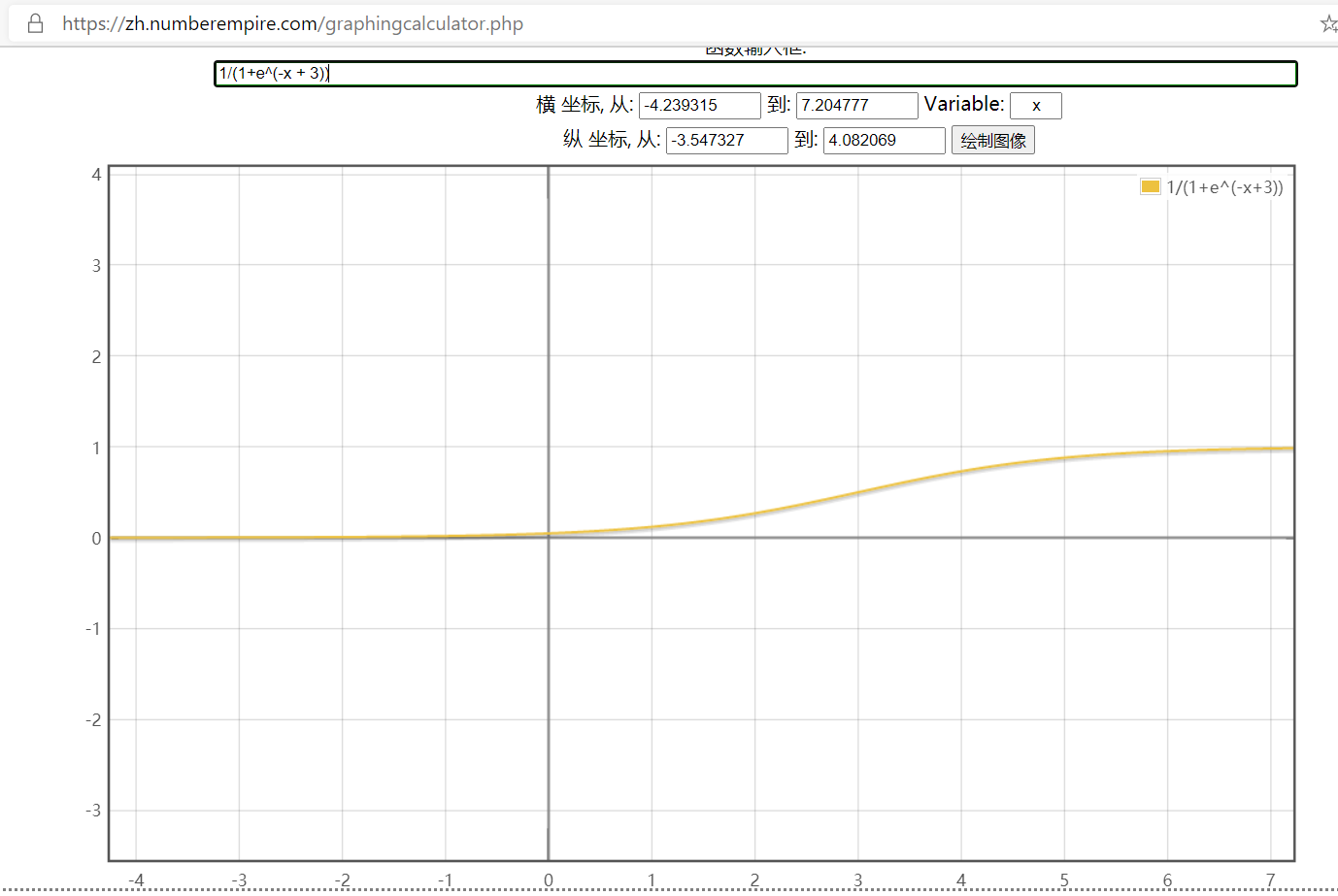
实际使用时,x作为加速次数,y就是速度。加速次数不可能为负数,所以需要对函数进行向右平移,也就是1/(1+e^(-x + 3)),这样当 x = 0时,y ≈ 0,这时0 ≤ x ≤ 6。但是加速次数也不可能为小数,而且6次加速太少了,所以要横向拉长函数。改变x的系数就可以拉长或缩短y ≈ 0时x的范围。这个函数的x的系数越小,函数看起来横向越长(实际无限长),x能取得的整数越多。
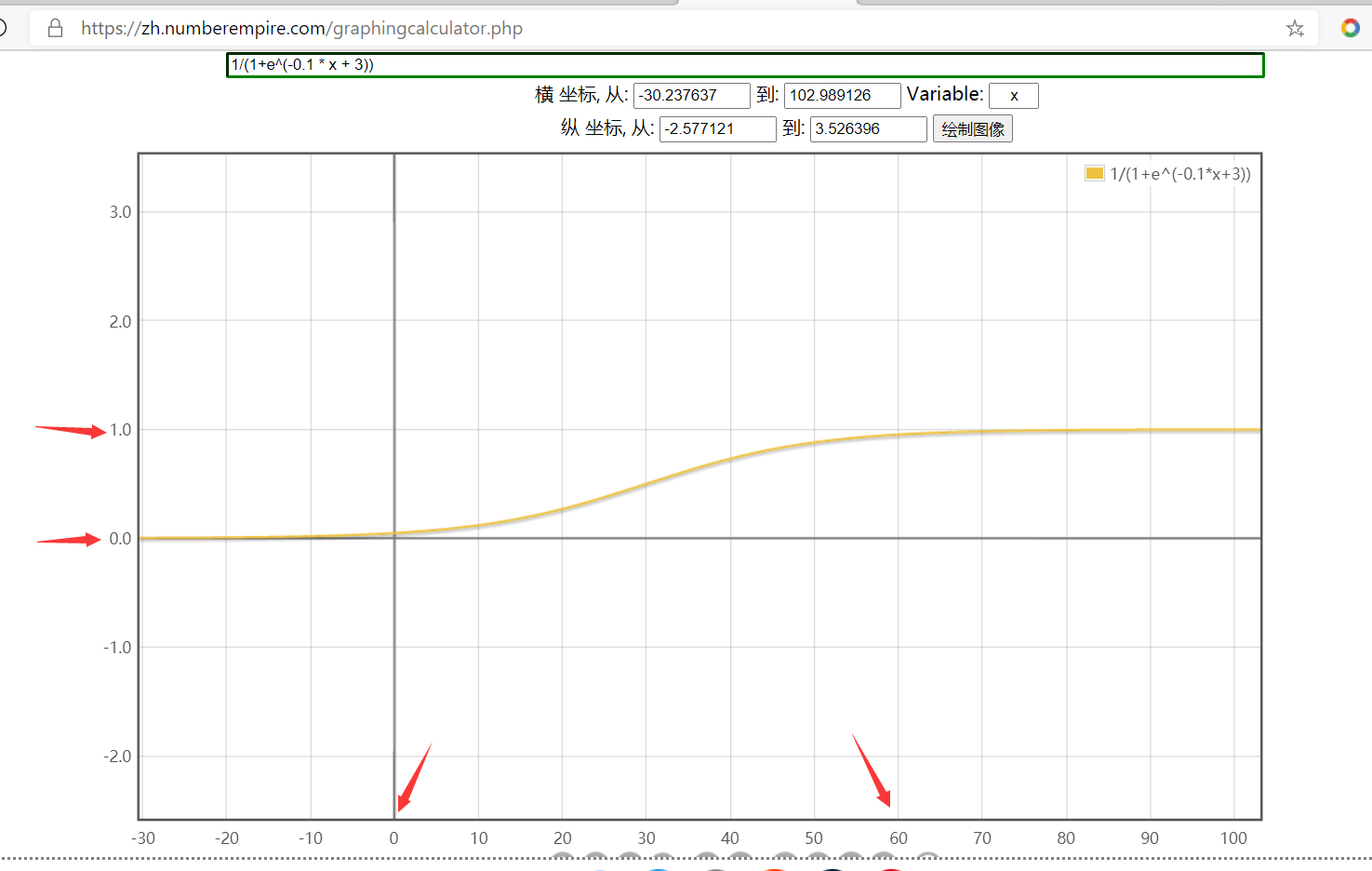
当系数为0.1时,1/(1+e^(-0.1x + 3)),x的有效值就是0到60,当系数为2时,1/(1+e^(-2x + 3)),x的有效值就是0到3。也就是说x取值的整数范围是系数的倒数,即1/0.1 x 6个,和1/2 x 6个。如果决定加速次数,那么系数就是6/加速次数,当加速次数为100次时,也就是1/(1+e^(-(6/100)x + 3))。
假如最大脉冲频率为1MHz,y乘以最大频率就可以知道当前实际频率了,即1000000 x 0.95257。如果将1/(1+e^-x)计算后的速度比例存起来,下次使用时只需查表,再乘以最大频率即可。
实现:
//buff_pa是速度表数组。count_va是加速次数。pan_right_va是右移量,代表了精度,即右移多少后,y强制为0,一般用7,最后一次速度在99.9%。count_va越大,S曲线越平缓,加速过程越平滑,加速时间越长;count_va越小,S曲线越陡峭,加速过程越急剧,加速时间越短。
void curve_s_init(float *buff_pa, uint16_t count_va, uint8_t pan_right_va)
{
for (uint16_t x = 0; x < count_va; x++)
buff_pa[x] = 1.0 / (1.0 + exp(((float)pan_right_va * 2 / count_va * -x) + pan_right_va));
//buff_pa[x] = 1.0 / (1.0 + pow(sqrt(m_e_v), (float)pan_right_va * 2 / count_va * -x + pan_right_va)); //这是通用计算方法,pow函数的第一个参数越接近1,该算式计算出的曲线越平缓,可以改的和线性加减速无异
}
例:
float curve_s_table_v[500];
curve_s_init(curve_s_table_v, 500, 7);
enum motor_state_t
{
motor_stop_state_v,
motor_accelerate_state_v,
motor_speed_max_state_v,
motor_decelerate_state_v
};
struct motor_spta_t
{
int32_t total_step_v; //设定运行总脉冲数。负数就往复位方向移动
uint32_t step_counter_v; //已经运行的脉冲数
uint16_t speed_v; //当前速度
uint32_t speed_max_threshold_v; //最大速度阈值,值越大,速度就能分的越精细,相当于速度百分比。用户设定的最大速度小于等于这个值
enum motor_state_t state_v; //运行状态
bool enable_interrupt_counter_v; //定时器中断计数的开关
uint16_t accelerate_decelerate_action_threshold_v; //加减速一次的频率阈值,当中断次数达到这个值后就会加减速一次
uint16_t accelerate_decelerate_interrupt_counter_v; //加减速时的定时器中断次数计数
uint32_t accelerate_decelerate_speed_counter_v; //加减速次数计数
uint32_t accelerate_decelerate_step_v; //加减速阶段的脉冲数
uint32_t speed_accumulator_v; //速度累加器
uint8_t motor_id_v; //用于查询
int32_t absolute_position_step_v; //绝对位置,以步数为单位
GPIO_TypeDef *step_gpio_array_v, *direction_gpio_array_v; //IO组,脉冲、方向
uint16_t step_gpio_v, direction_gpio_v; //IO号,脉冲、方向
};
#define curve_s_table_total_v 500 //s曲线参数个数
float curve_s_table_v[curve_s_table_total_v];
void curve_s_init(float *buff_pa, uint16_t count_va, uint8_t pan_right_va)
{
for (uint16_t x = 0; x < count_va; x++)
{
*buff_pa++ = 1.0 / (1.0 + exp(((float)pan_right_va * 2 / count_va * -x) + pan_right_va));
}
}
void motor_arg_init(struct motor_spta_t *motor_pa, uint8_t motor_id_va, GPIO_TypeDef *step_gpio_array_va, uint16_t step_gpio_va, GPIO_TypeDef *direction_gpio_array_va, uint16_t direction_gpio_va)
{
motor_pa->motor_id_v = motor_id_va;
motor_pa->step_gpio_array_v = step_gpio_array_va;
motor_pa->step_gpio_v = step_gpio_va;
motor_pa->direction_gpio_array_v = direction_gpio_array_va;
motor_pa->direction_gpio_v = direction_gpio_va;
motor_pa->speed_max_threshold_v = 0xffff;
motor_pa->absolute_position_step_v = 0;
}
void motor_move(struct motor_spta_t *motor_pa, int32_t total_step_va, uint16_t speed_max_va, uint16_t accelerate_decelerate_action_threshold_va)
{
if (total_step_va == 0)
return;
motor_pa->total_step_v = total_step_va;
motor_pa->step_counter_v = 0;
motor_pa->speed_v = 0;
motor_pa->speed_max_v = speed_max_va > motor_pa->speed_max_threshold_v ? motor_pa->speed_max_threshold_v : speed_max_va;
motor_pa->enable_interrupt_counter_v = true;
motor_pa->accelerate_decelerate_interrupt_counter_v = 0;
motor_pa->accelerate_decelerate_speed_counter_v = 0;
motor_pa->accelerate_decelerate_step_v = 0;
motor_pa->accelerate_decelerate_action_threshold_v = accelerate_decelerate_action_threshold_va;
motor_pa->speed_accumulator_v = 0;
if (motor_pa->total_step_v > 0)
{
if (motor_pa->reset_direction_io_level_v == GPIO_PIN_SET)
HAL_GPIO_WritePin(motor_pa->direction_gpio_array_v, motor_pa->direction_gpio_v, GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(motor_pa->direction_gpio_array_v, motor_pa->direction_gpio_v, GPIO_PIN_SET);
}
else
HAL_GPIO_WritePin(motor_pa->direction_gpio_array_v, motor_pa->direction_gpio_v, motor_pa->reset_direction_io_level_v);
motor_pa->state_v = motor_accelerate_state_v;
}
void motor_spta_algorithm(struct motor_spta_t *motor_pa)
{
if (motor_pa->state_v == motor_stop_state_v)
return;
bool carry_v = false;
//拉低脉冲信号
HAL_GPIO_WritePin(motor_pa->step_gpio_array_v, motor_pa->step_gpio_v, GPIO_PIN_RESET);
motor_pa->speed_accumulator_v += motor_pa->speed_v; //叠加速度
if (motor_pa->speed_accumulator_v >= motor_pa->speed_max_threshold_v) //阈值,如果当前速度达到阈值,发送脉冲的速度就达到最快了,这个阈值就是算法的最大速度
{
carry_v = true;
motor_pa->speed_accumulator_v -= motor_pa->speed_max_threshold_v;
}
if (carry_v == true) //判断是否溢出
{
motor_pa->step_counter_v++;
//拉高脉冲信号产生
HAL_GPIO_WritePin(motor_pa->step_gpio_array_v, motor_pa->step_gpio_v, GPIO_PIN_SET);
if (motor_pa->total_step_v > 0)
motor_pa->absolute_position_step_v++;
else
motor_pa->absolute_position_step_v--;
}
//根据电机的状态进行工作
switch (motor_pa->state_v)
{
case motor_accelerate_state_v:
//记录加速的步数
if (carry_v == true)
motor_pa->accelerate_decelerate_step_v++;
if (motor_pa->enable_interrupt_counter_v)
{
motor_pa->accelerate_decelerate_interrupt_counter_v++;
if (motor_pa->accelerate_decelerate_interrupt_counter_v >= motor_pa->accelerate_decelerate_action_threshold_v)
{
motor_pa->accelerate_decelerate_interrupt_counter_v = 0;
motor_pa->accelerate_decelerate_speed_counter_v++; //计录加速的次数
motor_pa->speed_v = curve_s_table_v[motor_pa->accelerate_decelerate_speed_counter_v] * motor_pa->speed_max_v; //计算当前速度
//如果加速次数达到最高次数,就停止加速,并让速度等于最大速度,再切换状态
if (motor_pa->accelerate_decelerate_speed_counter_v >= curve_s_table_total_v)
{
motor_pa->enable_interrupt_counter_v = false;
motor_pa->speed_v = motor_pa->speed_max_v;
motor_pa->state_v = motor_speed_max_state_v;
}
}
}
//如果总步数大于1步
if ((uint32_t)fabs(motor_pa->total_step_v) > 1) //fabs取绝对值的c库函数
{
if (motor_pa->step_counter_v >= (uint32_t)fabs(motor_pa->total_step_v) / 2) //如果已走步数大于最大步数的一半
{
//加速时中断计数被断,所以要调整,最后一次加速多长时间,减速的第一次的速度就维持多长时间
motor_pa->accelerate_decelerate_interrupt_counter_v = motor_pa->accelerate_decelerate_action_threshold_v - motor_pa->accelerate_decelerate_interrupt_counter_v;
motor_pa->state_v = motor_decelerate_state_v;
}
}
else if (motor_pa->step_counter_v > 0) //只有1步也至少走1步
motor_pa->state_v = motor_decelerate_state_v;
break;
case motor_speed_max_state_v:
if ((uint32_t)fabs(motor_pa->total_step_v) - motor_pa->step_counter_v == motor_pa->accelerate_decelerate_step_v)
{
motor_pa->enable_interrupt_counter_v = true;
//进入减速状态就要切换为减速状态时的最大速度
motor_pa->accelerate_decelerate_speed_counter_v--;
motor_pa->speed_v = curve_s_table_v[motor_pa->accelerate_decelerate_speed_counter_v] * motor_pa->speed_max_v; //计算当前速度
motor_pa->state_v = motor_decelerate_state_v;
}
break;
case motor_decelerate_state_v:
if (motor_pa->enable_interrupt_counter_v)
{
motor_pa->accelerate_decelerate_interrupt_counter_v++;
if (motor_pa->accelerate_decelerate_interrupt_counter_v >= motor_pa->accelerate_decelerate_action_threshold_v) //如果中断次数达到设定次数
{
motor_pa->accelerate_decelerate_interrupt_counter_v = 0;
motor_pa->accelerate_decelerate_speed_counter_v--;
motor_pa->speed_v = curve_s_table_v[motor_pa->accelerate_decelerate_speed_counter_v] * motor_pa->speed_max_v; //计算当前速度
if (motor_pa->speed_v <= motor_pa->speed_min_v)
{
motor_pa->enable_interrupt_counter_v = false;
}
}
}
if (motor_pa->step_counter_v >= (uint32_t)fabs(motor_pa->total_step_v))
{
//设定电机状态
motor_pa->state_v = motor_stop_state_v;
}
break;
default:
break;
}
}
void my_MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 72 - 1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 20 - 1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
switch ((uint32_t)htim->Instance)
{
case (uint32_t)TIM2:
motor_spta_algorithm(&motor1_v);
break;
default:
break;
}
}//示例:
struct motor_spta_t motor1_v;
int main()
{
curve_s_init(curve_s_table_v, curve_s_table_total_v, 7);
my_MX_TIM2_Init();
HAL_TIM_Base_Start_IT(&htim2);
motor_arg_init(&motor1_v, 1, GPIOA, GPIO_PIN_0, GPIOA, GPIO_PIN_1);
while(1)
{
motor_move(&motor1_v, 5000, 10000, 100);
}
}
以下为c++版本,更方便看的清楚了。如果不理解c++类的语法,可以去看“菜鸟教程”或者其他人的。这里简单说下,类(class)和结构体(struct)无本质区别,类就是在结构体上演化来的。c++版用还是像上面的c那样用,逻辑没变,只是有几句优化了下。
#ifndef ivesStepMotorH
#define ivesStepMotorH
#include "main.h"
namespace xiaguangbo
{
namespace motorNamespace
{
namespace ivesStepMotorNamespace
{
class ivesStepMotorClass
{
private:
static constexpr float pi = 3.1415926;
//运行状态
static const uint8_t motorStopState = 0;
static const uint8_t motorAccelerateState = 1;
static const uint8_t motorMaxState = 2;
static const uint8_t motorDecelerateState = 3;
//固定参数
static const uint8_t sCurveExcursion = 3; //s曲线偏移的量
static const uint16_t sCurvePointNumber = 200; //在s曲线上取的点的数量
static const uint16_t aCircleStep = 3200; //一圈的步数
static const uint16_t maxSpeedThreshold = 0xffff; //速度的最大值,因为速度变量是16位的,所以最大就是0xffff
//s曲线
static float sCurveTable[sCurvePointNumber]; //放s曲线数值的数组
static bool sCurveTableFlag; //s曲线是否已经计算过了
//算法核心参数
int32_t currentAbsolutePosition; //当前的绝对位置,以步数为单位
int32_t currentNeedRunStep; //将要运行的步数。负数就往复位方向移动
uint32_t temporaryStepCounter; //临时的步数计数,记录一次算法走了多少步
uint16_t currentSpeed; //当前速度
uint16_t targetSpeed; //要达到的速度
uint8_t runState; //运行状态
uint16_t accelerationInterval; //加减速一次的间隔
uint16_t interruptCounter; //加减速时的定时器中断次数计数
bool interruptCounterFlag; //中断计数的开关
uint32_t accelerationNumberCounter; //加减速次数计数
uint32_t accelerationStep; //加减速阶段的脉冲数
uint32_t speedAccumulator; //速度累加器
bool overflowFlag; //溢出标志
//定制化功能的参数
bool resetTimeDirPinLv; //复位时方向的io电平
uint16_t oneMmStep; //电机走1mm所需的步数
GPIO_TypeDef *stepGpioHandle, *dirGpioHandle, *enGpioHandle, *resetSensorGpioHandle; //IO组,脉冲、方向、复位限位
uint16_t stepGpioNumber, dirGpioNumber, enGpioNumber, resetSensorGpioNumber; //IO号,脉冲、方向、复位限位
bool resetSensorTriggerLv; //复位限位开关被触发后的电平
bool resetFlag; //是否处于复位
bool stopFlag; //是否被停止了
bool keepMoveFlag; //是否要一直转
bool enTimeEnPinSate;
/*
初始化s曲线参数表
*/
static void sCurveTableInit();
/*
电机每走一步都会执行的参数。主要用于检测复位开关
*/
void runTimeImplement();
void setBeltOneMmStep(uint8_t pitch, uint8_t motorGearTeeth) { oneMmStep = aCircleStep / (pitch * motorGearTeeth); }
void setGearOneMmStep(uint8_t pitch, uint8_t motorGearTeeth) { setBeltOneMmStep(pitch * pi, motorGearTeeth); }
void SetEnPinState(bool state) { HAL_GPIO_WritePin(enGpioHandle, enGpioNumber, GPIO_PinState(state)); }
public:
ivesStepMotorClass();
~ivesStepMotorClass();
/*
初始化
*/
void init(GPIO_TypeDef *stepGpioHandle, uint16_t stepGpioNumber, GPIO_TypeDef *dirGpioHandle, uint16_t dirGpioNumber, GPIO_TypeDef *enGpioHandle, uint16_t enGpioNumber, GPIO_TypeDef *resetSensorGpioHandle, uint16_t resetSensorGpioNumber, bool resetSensorTriggerLv, bool resetTimeDirPinLv, bool enTimeEnPinSate);
/*
移动相应的步数
need_run_step:步数。负值是向复位方向移动
acc_dec_interval:加速度
*/
void move(int32_t currentNeedRunStep, uint16_t targetSpeed, uint16_t accelerationInterval);
/*
移动到绝对位置。单位为mm
*/
void moveToAbsolutePosition(uint16_t absolutePosition, uint16_t targetSpeed, uint16_t accelerationInterval); //在没有使用set_mm_step设置mm_step之前,不要用
/*
移动到相对位置
*/
void moveToRelativePosition(int16_t relativePosition, uint16_t targetSpeed, uint16_t accelerationInterval);
/*
算法的循环。放在一个定时器里进行定时执行,调用的速度就是电机的最大速度
*/
void loop();
/*
根据参数计算并设置每走1mm需要的步数
beltOrGear:false:同步带。true:齿条
pitch:同步带的型号或齿条的模数
gear_teeth:电机上的齿轮的齿数
*/
void setOneMmStep(bool beltOrGear, uint8_t pitch, uint8_t motorGearTeeth)
{
if (beltOrGear == 0)
setBeltOneMmStep(pitch, motorGearTeeth);
else
setGearOneMmStep(pitch, motorGearTeeth);
}
/*
复位
*/
void reset(uint16_t targetSpeed = 5000, uint16_t accelerationInterval = 100);
/*
停止
*/
void stop();
/*
一直转
*/
void keepMove(bool dir, uint16_t targetSpeed, uint16_t accelerationInterval = 100);
bool getStopFlag() { return stopFlag; }
void resetStopFlag() { stopFlag = false; }
int32_t getCurrentAbsolutePosition() { return currentAbsolutePosition; }
};
} // namespace ivesStepMotorNamespace
} // namespace motorNamespace
} // namespace xiaguangbo
#endif#include "ivesStepMotor.hpp"
#include <math.h>
namespace xiaguangbo
{
namespace motorNamespace
{
namespace ivesStepMotorNamespace
{
float ivesStepMotorClass::sCurveTable[sCurvePointNumber];
bool ivesStepMotorClass::sCurveTableFlag;
ivesStepMotorClass::ivesStepMotorClass()
{
}
ivesStepMotorClass::~ivesStepMotorClass()
{
}
void ivesStepMotorClass::sCurveTableInit()
{
for (uint16_t x = 0; x < sCurvePointNumber; x++)
sCurveTable[x] = 1.0 / (1.0 + exp((sCurveExcursion * 2.0 / sCurvePointNumber * -x) + sCurveExcursion));
sCurveTableFlag = true;
}
void ivesStepMotorClass::init(GPIO_TypeDef *stepGpioHandle, uint16_t stepGpioNumber, GPIO_TypeDef *dirGpioHandle, uint16_t dirGpioNumber, GPIO_TypeDef *enGpioHandle, uint16_t enGpioNumber, GPIO_TypeDef *resetSensorGpioHandle, uint16_t resetSensorGpioNumber, bool resetSensorTriggerLv, bool resetTimeDirPinLv, bool enTimeEnPinSate)
{
if (sCurveTableFlag == false)
{
sCurveTableInit();
sCurveTableFlag = true;
}
this->stepGpioHandle = stepGpioHandle;
this->stepGpioNumber = stepGpioNumber;
this->dirGpioHandle = dirGpioHandle;
this->dirGpioNumber = dirGpioNumber;
this->enGpioHandle = enGpioHandle;
this->enGpioNumber = enGpioNumber;
this->resetSensorGpioHandle = resetSensorGpioHandle;
this->resetSensorGpioNumber = resetSensorGpioNumber;
this->resetSensorTriggerLv = resetSensorTriggerLv;
this->resetTimeDirPinLv = resetTimeDirPinLv;
stop();
SetEnPinState(enTimeEnPinSate);
}
void ivesStepMotorClass::move(int32_t currentNeedRunStep, uint16_t targetSpeed, uint16_t accelerationInterval)
{
if (currentNeedRunStep == 0)
{
stop();
return;
}
this->currentNeedRunStep = currentNeedRunStep;
temporaryStepCounter = 0;
currentSpeed = 0;
this->targetSpeed = targetSpeed > maxSpeedThreshold - 100 ? maxSpeedThreshold : targetSpeed + 100; //防止速度为0
interruptCounterFlag = true;
interruptCounter = 0;
accelerationNumberCounter = 0;
accelerationStep = 0;
this->accelerationInterval = accelerationInterval;
speedAccumulator = 0;
if (currentNeedRunStep > 0)
HAL_GPIO_WritePin(dirGpioHandle, dirGpioNumber, (GPIO_PinState)(!resetTimeDirPinLv));
else
HAL_GPIO_WritePin(dirGpioHandle, dirGpioNumber, (GPIO_PinState)resetTimeDirPinLv);
runState = motorAccelerateState;
}
void ivesStepMotorClass::moveToAbsolutePosition(uint16_t absolutePosition, uint16_t targetSpeed, uint16_t accelerationInterval)
{
move(absolutePosition * oneMmStep - this->currentAbsolutePosition, targetSpeed, accelerationInterval);
}
void ivesStepMotorClass::moveToRelativePosition(int16_t relativePosition, uint16_t targetSpeed, uint16_t accelerationInterval)
{
move(relativePosition * oneMmStep, targetSpeed, accelerationInterval);
}
void ivesStepMotorClass::runTimeImplement()
{
if (resetSensorGpioHandle == nullptr)
return;
if (HAL_GPIO_ReadPin(resetSensorGpioHandle, resetSensorGpioNumber) == resetSensorTriggerLv) //检查复位开关
{
if (resetFlag == true)
{
stop();
currentAbsolutePosition = 0; //绝对位置置0
}
else if (currentNeedRunStep < 0) //不能继续向复位的方向走,但可以向复位的反方向走
stop();
}
}
void ivesStepMotorClass::loop()
{
if (runState == motorStopState)
return;
if (overflowFlag) //如果产生了高电平
HAL_GPIO_WritePin(stepGpioHandle, stepGpioNumber, GPIO_PIN_RESET); //拉低脉冲信号
overflowFlag = false;
speedAccumulator += currentSpeed; //叠加速度
if (speedAccumulator >= maxSpeedThreshold) //阈值,如果当前速度达到阈值,发送脉冲的速度就达到最快了,这个阈值就是算法的最大速度
{
overflowFlag = true;
speedAccumulator -= maxSpeedThreshold;
}
if (overflowFlag) //如果溢出
{
temporaryStepCounter++;
HAL_GPIO_WritePin(stepGpioHandle, stepGpioNumber, GPIO_PIN_SET); //拉高脉冲信号产生
if (currentNeedRunStep > 0)
currentAbsolutePosition < 0x7fffffff ? currentAbsolutePosition++ : currentAbsolutePosition;
else
currentAbsolutePosition > (int32_t)0x80000000 ? currentAbsolutePosition-- : currentAbsolutePosition;
runTimeImplement(); //额外的操作,比如检测复位开关
}
//根据电机的状态进行工作
switch (runState)
{
case motorAccelerateState:
//记录加速的步数
if (overflowFlag)
accelerationStep++;
if (interruptCounterFlag)
{
interruptCounter++;
if (interruptCounter >= accelerationInterval)
{
interruptCounter = 0;
accelerationNumberCounter++; //计录加速的次数
currentSpeed = sCurveTable[accelerationNumberCounter] * targetSpeed; //计算当前速度
//如果加速次数达到最高次数,就停止加速,并让速度等于最大速度,再切换状态
if (accelerationNumberCounter >= sCurvePointNumber)
{
interruptCounterFlag = false;
currentSpeed = targetSpeed;
runState = motorMaxState;
}
}
}
//如果总步数大于1步
if ((uint32_t)fabs(currentNeedRunStep) > 1)
{
if (temporaryStepCounter >= (uint32_t)fabs(currentNeedRunStep) / 2) //如果已走步数大于最大步数的一半
{
//加速时中断计数被断,所以要调整,最后一次加速多长时间,减速的第一次的速度就维持多长时间
interruptCounter = accelerationInterval - interruptCounter;
runState = motorDecelerateState;
}
}
else if (temporaryStepCounter > 0) //只有1步就至少走1步
runState = motorDecelerateState;
break;
case motorMaxState:
if (keepMoveFlag && overflowFlag == true) //当处于保持转动的状态时
temporaryStepCounter--; //加一次就减一次,防止步数达到进入减速的要求
if ((uint32_t)fabs(currentNeedRunStep) - temporaryStepCounter <= accelerationStep)
{
interruptCounterFlag = true;
//进入减速状态就要切换为减速状态时的最大速度
accelerationNumberCounter--;
currentSpeed = sCurveTable[accelerationNumberCounter] * targetSpeed; //计算当前速度
runState = motorDecelerateState;
}
break;
case motorDecelerateState:
if (interruptCounterFlag)
{
interruptCounter++;
if (interruptCounter >= accelerationInterval) //如果中断次数达到设定次数
{
interruptCounter = 0;
accelerationNumberCounter--;
currentSpeed = sCurveTable[accelerationNumberCounter] * targetSpeed; //计算当前速度
if (accelerationNumberCounter <= 1)
interruptCounterFlag = false;
}
}
if (temporaryStepCounter >= (uint32_t)fabs(currentNeedRunStep))
stop();
break;
default:
break;
}
}
void ivesStepMotorClass::reset(uint16_t targetSpeed, uint16_t accelerationInterval)
{
resetFlag = true;
keepMove(false, targetSpeed, accelerationInterval); //向复位方向一直走
}
void ivesStepMotorClass::stop()
{
runState = motorStopState;
stopFlag = true;
keepMoveFlag = false;
resetFlag = false;
}
void ivesStepMotorClass::keepMove(bool dir, uint16_t targetSpeed, uint16_t accelerationInterval)
{
keepMoveFlag = true;
move(aCircleStep * 100 * (dir == false ? -1 : 1), targetSpeed, accelerationInterval); //步数至少让加速能加满
}
} // namespace ivesStepMotorNamespace
} // namespace motorNamespace
} // namespace xiaguangbo
最后
以上就是漂亮小懒猪最近收集整理的关于步进电机S加减速,SPTA结合S加减速的全部内容,更多相关步进电机S加减速内容请搜索靠谱客的其他文章。








发表评论 取消回复