绪论
- 1.1 惯性执行机构概述
- 1.2 惯性执行机构工作原理及分类
- 1.2.1 惯性执行机构工作原理
- 1.2.2 惯性执行机构分类
- 1.2.2.1 分类一(角动量大小和方向的变化方式)
- 1.2.2.2 分类二(转子的支承方式)
- 1.2.3 磁悬浮惯性执行机构分类
- 1.2.3.1 分类一
- 1.2.3.2 分类二
- 1.3 磁悬浮惯性动量轮组成
1.1 惯性执行机构概述
航天器控制。
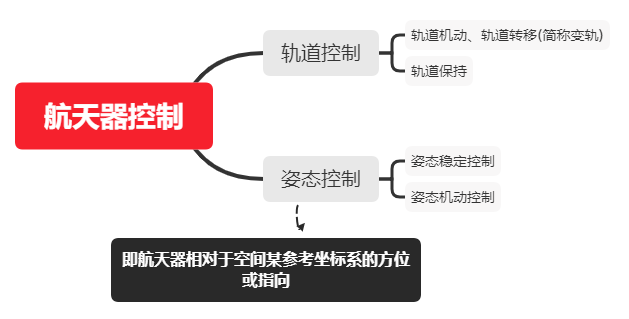
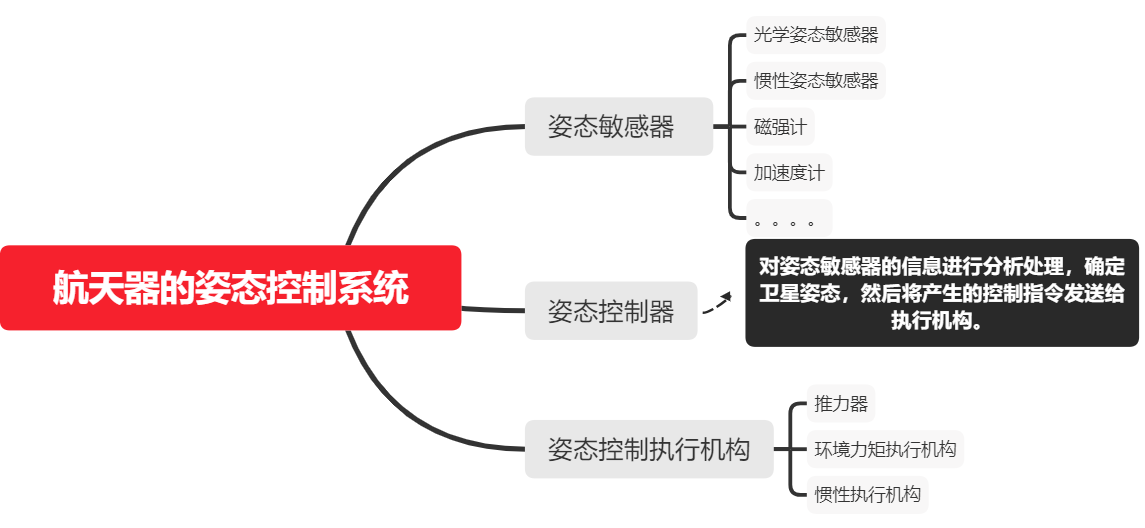
航天器的姿态控制系统。
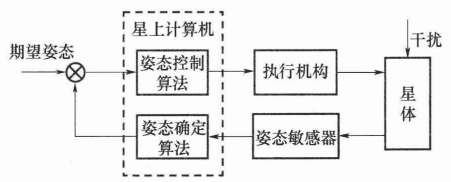
下图为卫星姿态控制系统框图。
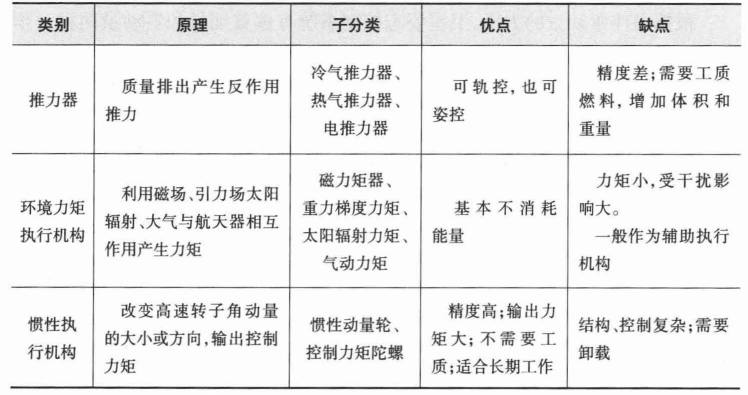
下表为各种姿态控制执行机构的优缺点。
1.2 惯性执行机构工作原理及分类
1.2.1 惯性执行机构工作原理
1.2.2 惯性执行机构分类
1.2.2.1 分类一(角动量大小和方向的变化方式)
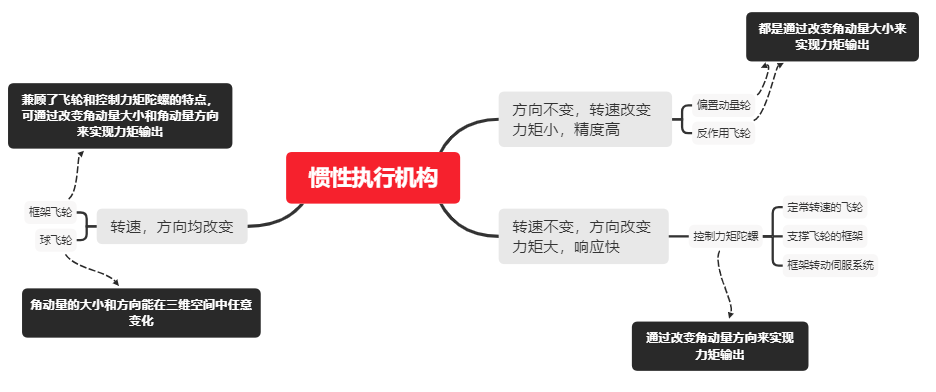
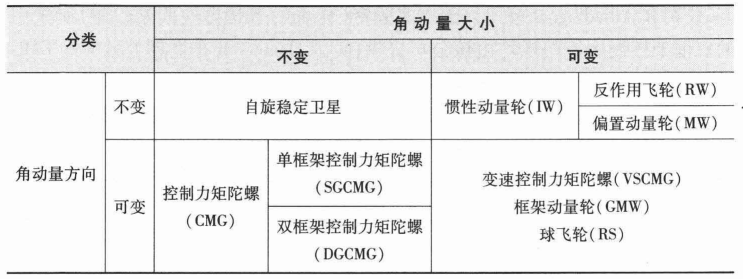
惯性执行机构根据角动量大小和方向的变化方式不同,分为如下几类。
其中,最常用的是惯性动量轮和控制力矩陀螺两类,它们的优缺点如下表所示。

就惯性动量轮而言,根据其角动量转速的标称值是否为零又可分为零动量轮(或反作用飞轮( Reaction Wheel, RW))和偏置动量轮( Momentum Wheel ,MW)。控制力矩陀螺(ControlMomentGyroscopic,CMG)、变速控制力矩陀螺( Vary Speed Control Moment Gyroscopic , VSCMG)和框架动量轮( Gimbal Momen-tum Wheel ,GMW )根据框架的多少又有单框架和双框架之分。其中框架动量轮是带有框架具备-定偏转自由度( +15°~ +20°) 的偏置动量轮,而控制力矩陀螺的框架转动范围较大(土175°或不受限制)。球飞轮( Reaction Sphere,RS,也称动量球或反作用球)则采用球形转子,其角动量大小不仅可以任意改变,其角动量方向更是可以实现三自由度的任意指向。
由于变速控制力矩陀螺( VSCMG)、框架动量轮( GMW)和球飞轮(RS)的角动量大小和方向均可改变,因而具有输出力矩大、精度高的优点,由于其结构、控制复杂,目前虽未广泛应用,但具有广阔的应用前景。
1.2.2.2 分类二(转子的支承方式)
惯性执行机构根据转子的支承方式不同,分为如下几类。
传统惯性执行机构采用机械轴承支承,存在以下问题:
- 反作用飞轮转向频繁切换,转速频繁过零,机械轴承过零时出现的静摩擦力矩严重影响其输出力矩精度;
- 飞轮旋转过程中产生的不平衡振动将直接传递给卫星,从而对卫星带来扰动;
- 转子振动同样影响轴承寿命;
- 机械轴承的润滑还会导致黏滞力矩、力矩扰动以及静摩擦等。
因此,传统机械轴承支承的飞轮和控制力矩陀螺也是航天器姿态控制系统扰动力或扰动力矩的主要来源之一,这些扰动力或扰动力矩会直接降低航天器指向度和姿态稳定度。基于机械轴承支承的惯性执行机构从根本上制约了其性能、可靠性和寿命的进一步提升,难以满足新一代卫星平台的性能指标需求。
磁悬浮惯性执行机构采用磁轴承支承技术,具有如下优点:
- 无接触、无摩擦、无需润滑,可实现长寿命。
- 精度高,如转子的回转精度主要取决于传感器的检测精度和轴承控制系统。
- 高转速(可达到几万转/分钟甚至十几万转/分钟)。
- 可实现主动控制,刚度和阻尼等特性能够通过控制器进行调节。
- 振动小,由于磁气隙的存在,在航天器姿态控制应用中,允许转子在可控范围内“涡动”,以减小转子不平衡对卫星等航天器造成的影响。
由于上述优点,使得磁悬浮惯性执行机构具有精度高、寿命长、功耗低等潜在优势,被誉为“航天器理想的姿态控制执行机构”
1.2.3 磁悬浮惯性执行机构分类
1.2.3.1 分类一
磁悬浮惯性执行机构根据输出力矩的特性和方式的分类如下图所示。
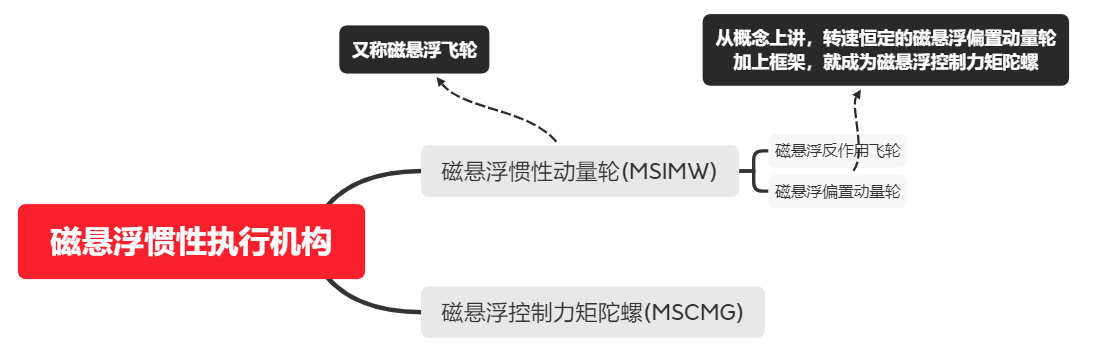
- 磁悬浮反作用飞轮。反作用飞轮的工作特点是飞轮旋转方向频繁切换,转速频繁过零。磁悬浮反作用飞轮由于无接触摩擦,它的过零摩擦力矩小,可进行不平衡振动抑制,输出力矩精度高,特别适用于高精度、高稳定度等高分辨力对地观测卫星。即通过飞轮的加减速产生控制力矩,平均角动量为零。
- 磁悬浮偏置动量轮。磁悬浮偏置动量轮能保持在较高速度旋转,能输出较大的角动量和力矩,使用寿命长,不仅能通过不平衡振动抑制大幅减小其高频振动,而且能够通过主动控制转子偏转,输出较大的偏转力矩。即通过飞轮的加减速产生控制力矩,存在偏置动量。偏置动量可理解为预先给定的偏移量。
- 磁悬浮控制力矩陀螺。磁悬浮控制力矩陀螺不存在机械摩擦,可以从根本上解决控制力矩陀螺的寿命、可靠性问题,同时可进行振动的主动抑制,实现高精度、大力矩姿态控制,是空间站姿态控制执行机构的理想选择。
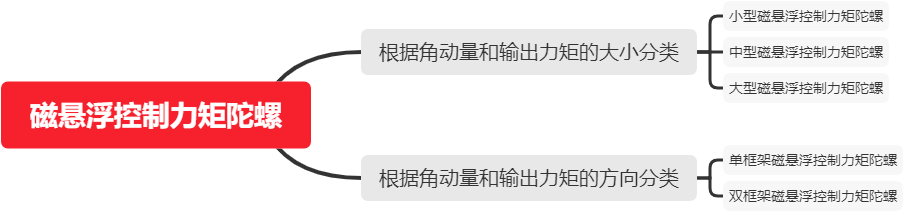
磁悬浮控制力矩陀螺的分类如下图所示。
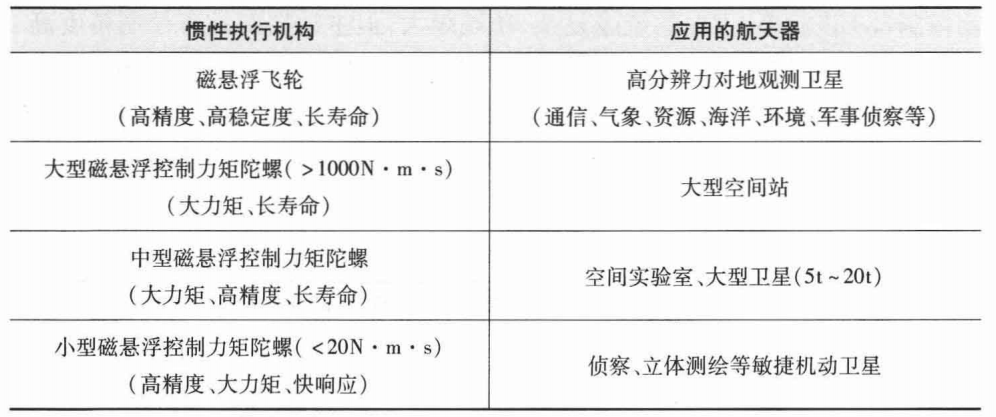
磁悬浮惯性执行机构的用途如下表所示。
1.2.3.2 分类二
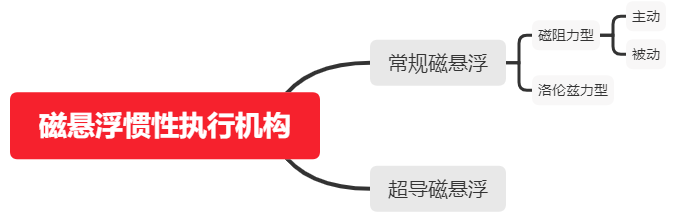
空间用磁悬浮惯性执行机构从磁轴承技术发展来看,主要有常规磁悬浮和超导磁悬浮两个分支。超导磁悬浮由于受到温度条件等因素的制约,目前尚未有航天应用的先例。
常规磁悬浮按照磁轴承悬浮力产生的机理不同,主要分为磁阻力型和洛仑兹力型两种。
其中磁阻力型磁轴承根据其磁力是否主动可控,又有主动和被动之分。主动磁轴承多为吸力型;而被动磁轴承可以是吸力型,也可以是斥力型。
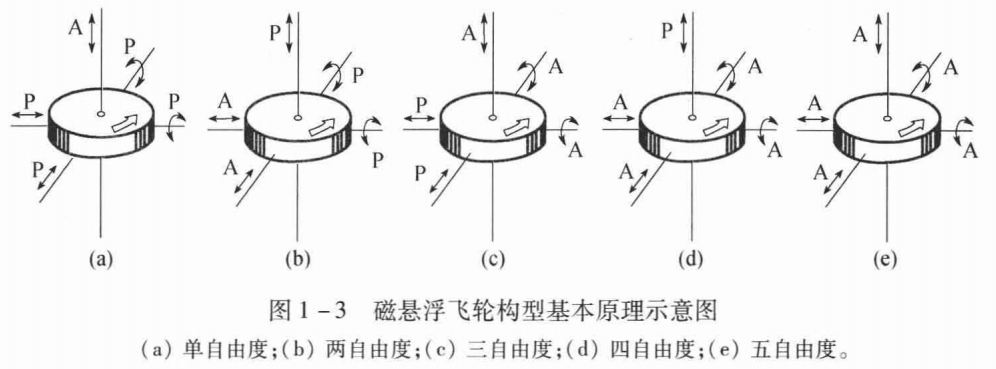
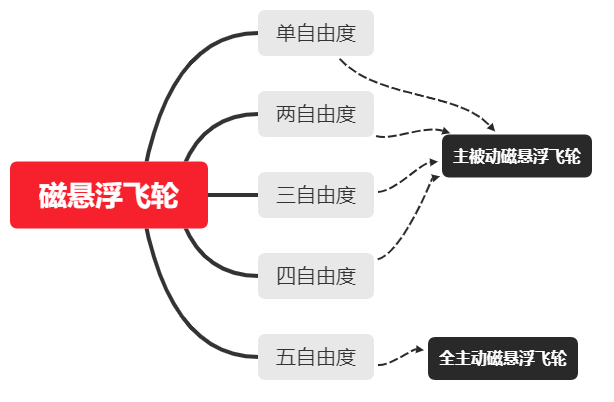
传统的磁悬浮飞轮除了驱动电机所控制的一个转动自由度外,其余五个自由度均需由磁轴承悬浮支承,由于单独依靠被动磁轴承无法实现转子的五自由度稳定悬浮,需要与主动磁轴承相配合,因此根据磁悬浮飞轮主动控制自由度的多少,常将其划分为单自由度、两自由度、三自由度、四自由度和五自由度五种,其中五自由度磁悬浮飞轮也称全主动磁悬浮飞轮,而其他四种磁悬浮飞轮则统称为主被动磁悬浮飞轮。下图给出了单自由度至五自由度磁悬浮飞轮构型基本原理示意图,A表示主动控制自由度,P表示被动非主动控制自由度。
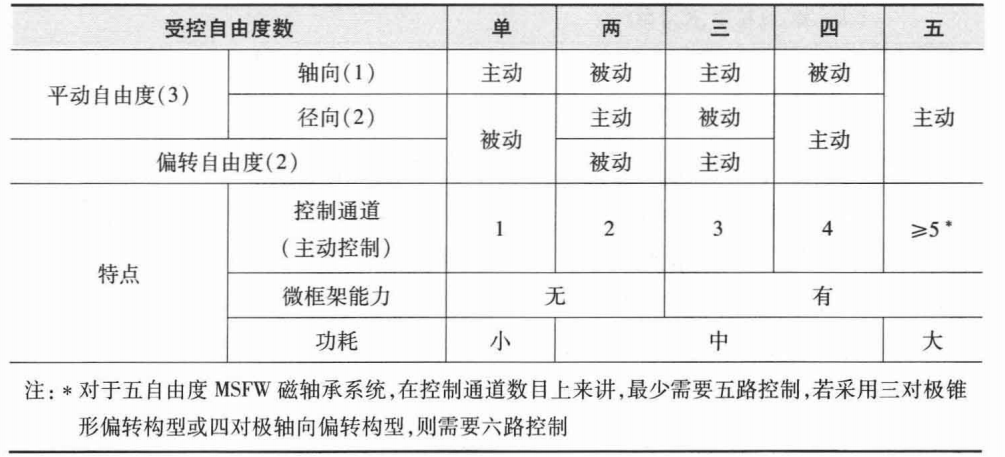
磁悬浮飞轮主动控制自由度的多少与其性能指标密切相关,一般而言,主动控制自由度越多,飞轮系统越复杂,功耗越大,但主动控制具有控制精度高、刚度阻尼可调抗扰动能力强等优点。主被动磁悬浮飞轮的非主动控制自由度由永磁力或磁偏拉力实现其被动稳定控制,功耗低;全主动磁悬浮飞轮可实现高精度主动振动控制和大偏转力矩输出,各自由度磁悬浮飞轮构型特点如下表所示。
一般而言,被动磁轴承无控制损耗,系统结构简单,可靠性高;而主动磁轴承则在控制精度和振动抑制方面有着独特的优势。
1.3 磁悬浮惯性动量轮组成
磁悬浮惯性动量轮采用磁轴承支承,可以从根本上解决传统机械轴承支承动量轮所存在的摩擦和振动问题,不仅具有高精度、长寿命、高转速等突出优点,而且在功能密度、可靠性、体积、重量和功耗等方面都存在潜在的技术优势。
磁悬浮动量轮根据其转子结构形式的不同,分为内转子和外转子两种,主要由转子组件壳体组件、磁轴承及其控制系统、电机及其控制系统、锁紧机构及其控制系统等五部分组成。
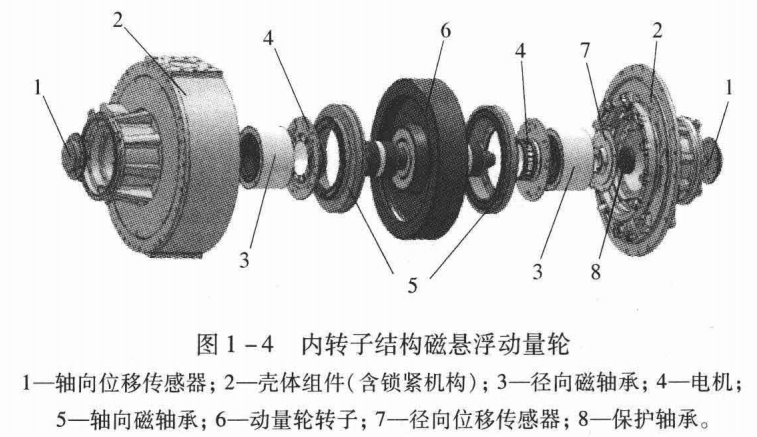
内转子结构的磁悬浮动量轮如图所示。
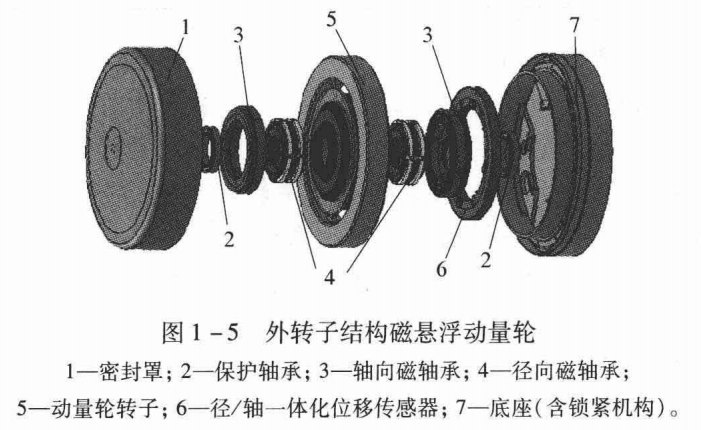
外转子结构的磁悬浮动量轮如图所示。
磁悬浮动量轮各部分的主要功能如下:
- 转子组件,轮盘为其主要的质量组成,具有较大的转动惯量,通过角动量交换控制卫星姿态,并可实现高速能量储存。转子上安装有磁轴承转子组件和电机转子组件。
- 壳体组件,一般由密封壳(罩)和底座组成,为动量轮转子的最终承重支承构件,在提供部件支承的同时,具有安全防护、散热和密封等功能。其上安装有磁轴承定子、电机定子、保护轴承、锁紧机构,以及电器接插件、抽气嘴、基准镜(提供角动量矢量方向基准)等,同时也提供动量轮机械安装界面与星体连接。一体化动量轮的电子线路也安装在壳体上。其中保护轴承在系统静止、调试或过载等情况下起保护作用。
- 磁轴承及其控制系统,磁轴承一般包括径向磁轴承定转子组件和轴向磁轴承定转子组件,用于动量轮转子五个自由度(电机控制一个转动自由度)的稳定悬浮控制。磁轴承控制系统主要包括位移传感器、控制器和功率放大器等三部分。
- 电机及其控制系统,主要根据卫星姿态控制系统的指令,通过对动量轮转子加、减速产生反作用力矩,实现动量轮与星体之间的动量交换(和能量交换) ,达到卫星姿态控制(和能量存储释放)的目的。就电机的控制方式而言,通常分为速率控制模式和力矩控制模式。对于速率控制模式,采用霍耳元件或光电码盘进行测速,其控制信号与角动量成正比,动量轮内部的各类阻力矩在控制之内,因此控制精度高;对于力矩控制模式,利用电机电流与电机电磁力矩成正比进行控制,动量轮内部阻力矩与外界干扰力矩一起成为对星体的干扰,因此这种控制模式精度相对较低。
- 锁紧机构及其控制系统,它是MSFW所特有的,是在航天器发射主动段,用于保护磁悬浮动量轮转子组件,避免其承受过载造成轮体变形、损坏的主要机构,一般要求具有重复锁紧/解锁功能。航天器在发射过程中将产生剧烈的振动和冲击,由于磁悬浮动量轮采用磁轴承技术,定子和转子之间存在间隙,为了防止动量轮系统损坏,需要额外的锁紧装置对其进行保护;而当磁悬浮动量轮进人预定轨道,需要对动量轮转子进行解锁,便于其工作。另外,由于磁悬浮动量轮发射前需通过一系列的力学环境试验(扫频、振动、冲击、离心等),需经常对动量轮转子进行锁紧和解锁。而磁悬浮动量轮具备灵活的在轨重复锁紧/解锁功能,也有利于满足航天器实现某些特殊的姿态轨道调整的需求。
此外,就磁悬浮控制力矩陀螺的组成而言,还包括框架及其伺服控制系统。
最后
以上就是闪闪铃铛最近收集整理的关于磁悬浮惯性动量轮技术_第1章_绪论1.1 惯性执行机构概述1.2 惯性执行机构工作原理及分类1.3 磁悬浮惯性动量轮组成的全部内容,更多相关磁悬浮惯性动量轮技术_第1章_绪论1.1内容请搜索靠谱客的其他文章。








发表评论 取消回复